基于双体结构的无人测绘艇航向控制
2020-06-30 08:49王晨旭张安民
科学技术与工程 2020年16期
周 健,王晨旭,张安民
(天津大学海洋科学与技术学院,天津 300072)
随着智能化时代的进展,无人化系统在各领域中的应用越来越广泛,其在海洋测绘中体现为以无人艇为平台搭载各类设备的综合测量系统。为了实现水面无人艇的自主航行,通常必须解决三方面的内容,即航向稳定、航线跟随与自主路径规划[1]。因此航向控制是无人艇能够准确执行任务的基础,也是关键所在。无人艇的航向控制算法多种多样,当前大部分学者采用的方法主要包括神经网络控制、自适应控制、模糊控制和鲁棒控制[2]等:Naeem等[3]针对Springer号双体无人艇,设计了基于线性高斯理论和遗传算法的航向控制器;谭西都[4]设计了一种专门用于海上搜救的双体无人艇,并通过智能自整定PD航向控制器实现其航向控制;Fang等[5]研究了一种基于模糊神经算法的航向自整定器,但其实现过程较为复杂;武颖等[6]利用反演滑模控制理论设计了针对欠驱动水面无人艇的航向控制器,并通过计算机仿真和实船试验验证了算法的有效性。李小毛等[7]提出了一种基于α-β滤波的无人艇航向角控制方案,这种方法不同于传统的控制理论,实现了航向角全值域的滤波。现设计一种双体无人测绘艇,介绍其设计理念并采用RBF(radial basis function)神经网络结合PID(proportion integration differentiation)控制算法实现对其的航向控制。
1 双体无人艇整体设计
为了满足更加复杂恶劣海况下的测绘需求,设计一种基于双体结构的无人测绘艇,如图1所示。无人艇采用碳质横骨架连接的双体结构,能够获得更加稳定的航行效果和抗风浪能力。艇身两侧浮体后各安装一个由电动机驱动的螺旋桨,通过双桨转速配合可平稳地实现原地旋回转向。在试验中,该艇可以满足在河流、湖泊、海洋(1~3级海况)等环境中安全工作的要求。

图1 双体结构无人测绘艇Fig.1 Unmanned surveying and mapping catamaran
为充分满足测量要求,无人艇应搭载雷达、单(多)波束测深仪、测距仪、AIS(automatic identification system)、IMU(inertial measurement unit)系统、摄像系统等仪器设备。因此在设计过程中,艇身选用轻型碳质材料搭配铝合金底座,整体质量适中,同时无人艇开敞的上层空间有利于更多设备的搭载与固定。表1中给出了该无人艇的各项详细参数。

表1 无人艇各项指标参数Table 1 Parameters of the unmanned surface vehicle
2 无人艇航向控制策略
2.1 典型PID控制
PID控制技术是当前在工程领域中最广泛使用的反馈控制技术,由比例、积分和微分三部分单元组成[8-9]。比例、积分和微分这三个PID控制器的纠偏环节用于减小系统偏置,加快系统响应速度,PID自动控制器的原理如图6所示。

图2 PID自动控制原理图Fig.2 Diagram of PID automatic control
从图2可以看出,偏差e(t)是输入值r(t)与输出值y(t)的差值。在PID模块中先对系统偏差e(t)进行比例、微分和积分运算,相加后得到PID控制器的输出u(t)。连续时间中PID算法控制律表达式为
(1)
图3、图4中的仿真曲线表示仅用PID算法控制无人艇运动时航向与双螺旋桨转速差值随时间的变化效果。设置输入航向为100°,并通过手动调节PID模块中的系数Kp=0.45、Ki=-0.000 3、Kd=0,使系统能够达到比较理想的效果。可以看出,单一的PID控制基本能够达到船舶航向控制的要求,但系统达到稳定时的调节时间较长,而且Kp、Ki、Kd的值也无法通过自学习达到最佳水平。因此考虑设计一种能够降低系统调节时间和超调量并能够自动更新各系数的控制方法。
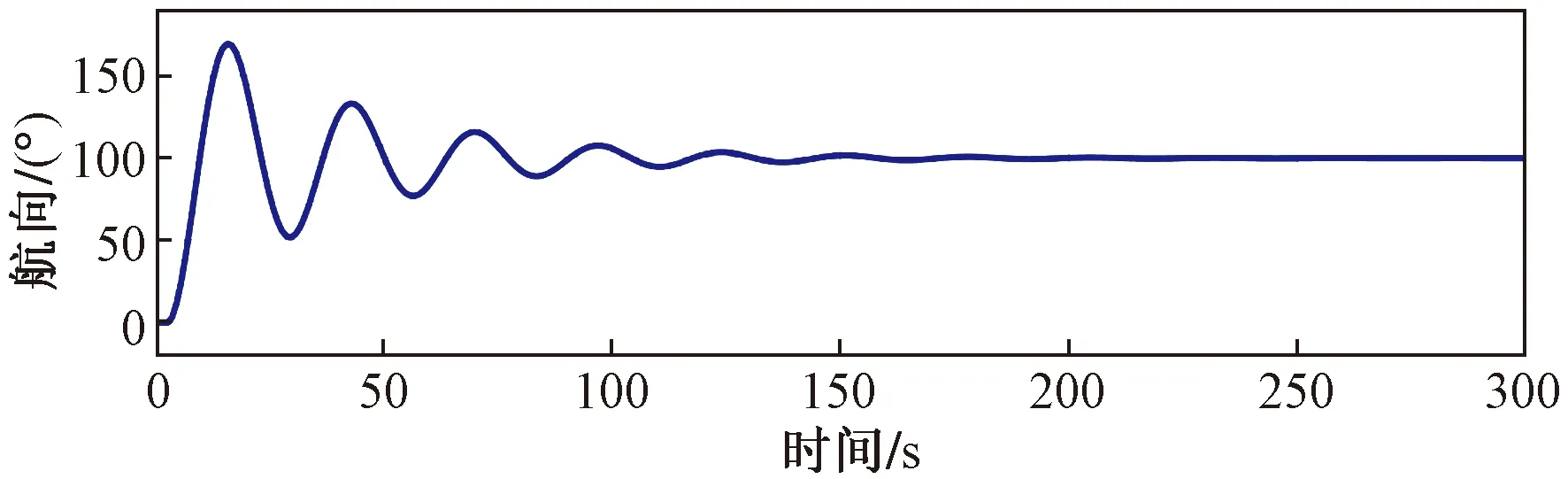
图3 PID控制航向变化Fig.3 Course change of PID control

图4 PID控制双桨转速差变化Fig.4 Speed difference between propellers of PID control
2.2 基于RBF神经网络的PID控制
2.2.1 RBF算法原理
RBF神经网络具有单隐层的三层前向反馈网络结构。由于RBF神经网络可以在局部以任意精度逼近非线性连续函数,因此广泛应用于非线性控制、模式分类、图像处理等研究领域。RBF神经网络的另一个特殊性在于输入层到隐含层的权重始终为1,在深度复杂网络的训练中可以减少求解次数。设RBF网络径向基向量,H=(h1,h2,…,hm),hj为高斯基函数,其具体形式为[10]
(2)
式(2)中:输入向量X=(x1,x2,…,xn)T;高斯基函数中心向量Cj=(cj1,cj2,…,cjn)T;bj是高斯函数中第j个隐层神经结点的形状参数,也称为基宽度。因此神经网络输出为
(3)
式(3)中:wi为神经网络隐层到输出层的权重系数。因此RBF神经网络的性能指标函数为
(4)
式(4)中:y(k)是k时刻控制系统的输出值;ym(k)是k时刻神经网络的输出值。根据梯度下降算法,输出权重、中心向量以及基宽度参数的迭代算法为
(5)
式(5)中:η为学习速率;α为惯性系数。
2.2.2 RBF神经网络PID控制器
基于RBF神经网络的PID控制器中包含PID控制器和RBF神经网络辨识器[11]。辨识器通过被控对象的输入和输出来训练出被控系统的近似模型,最终使神经网络的输出与被控对象的输出一致。在模型训练的过程中,除神经网络中各参数参与训练外,PID控制系统的参数Kp、Ki、Kd也由神经网络自适应调整至最佳水平。RBF神经网络PID控制器结构如图5所示。

图5 RBF神经网络控制器Fig.5 RBF neural network controller
控制系统的误差为
e(k)=r(k)-y(k)
(6)
PID控制器的输入为

(7)
PID的控制算法为
Δu(k)=Kpxc(1)+Kixc(2)+Kdxc(3)
(8)
根据梯度下降法,对模型训练过程中的Kp、Ki、Kd进行迭代[12]:
(9)
式(10)为Kp、Ki、Kd的迭代结果;η2为学习速率。因此得到PID控制器的最终输出为
(10)
3 无人艇运动模型的建立
船舶运动数学模型是船舶运动仿真与控制问题的核心,是船舶运动方程的近似。无人艇在水中航行时,通常是欠驱动的状态,并同时进行6个自由度内的运动,包括前进、横移、垂荡、横摇、纵摇和艏摇。在研究中为了达到简化模型的目的,一般只考察平面或三个自由度内的运动规律。
3.1 船舶平面运动线性数学模型
在线性化的前提下,考虑无人艇的前进、横漂以及转艏运动时,船舶的运动模型为[13]
(11)
(12)

3.2 三自由度状态空间船舶运动模型
航向保持是无人艇在执行测绘任务的过程中的一项关键技术,也是影响测量准确定的关键因素。因此,在无人艇运动数学模型中应加入一个直观体现的航向变量ψ,使式(13)中的状态向量变为[vrψ]T,因此能够得到无人艇运动数学模型为
(13)
式(14)中:a11、a12、a21、a22、b11、b21为替代项,其具体数值可由式(13)中的参数推导得到,文献[14]给出了无人艇运动传递函数的推导过程。最终获得该无人测绘艇的响应方程为
(14)
式中:K称为回转性指数,用于反映无人艇的旋回特性;T为追随性指数,可反映无人艇的航向稳定性。
4 实例仿真分析
MATLAB中提供了一种可用于动态仿真的工具箱Simulink,这里用程序编写RBF神经网络的实现过程,并在程序中调用Simulink工具箱中搭建好的PID控制器,实现无人艇的航向仿真控制。为了进一步突出RBF神经网络PID的整定效果,采用三种不同的航向控制器分别仿真。
(1)采用单一自适应PID控制器,Kp、Ki、Kd由手动调节给出。
(2)采用BP神经网络自适应PID控制器,Kp、Ki、Kd通过前向网络迭代获得[15]。
(3)采用RBF-PID控制器,Kp、Ki、Kd通过程序调用S函数迭代获得。
给定输入航向100°,观察系统输出的变化。将系统的仿真时间设为2 000 s,并在第1 000 s时加入随机扰动,考验系统对扰动的响应能力。图6~图8分别显示出了在三种不同算法控制下航向、两螺旋桨转速差以及系统误差随时间的变化。

图6 航向-时间变化曲线Fig.6 Course-time change curve

图7 双桨转速差-时间变化曲线Fig.7 Speed difference-time change curve

图8 系统误差-时间变化曲线Fig.8 System error-time change curve
可以看出,系统在不同算法的控制下都可以达到稳定状态,但是达到稳态的时间以及系统的超调量等有很大差别。对于单一采用PID控制的系统,虽然能够达到航向控制的要求,但是在短时间内航向和双桨转速差的波动非常剧烈,从而会降低无人艇的可操控性。通过BP神经网络算法获得的PID控制器参数,可以使系统整体的平滑性良好,对扰动也可以进行有效的纠正。但是系统在自适应算法控制下的超调量大、稳定时间长,意味着无人艇改变航向后需要较长时间才能稳定在新航向上,不利于航向稳定性的保持和一些测量设备的作业。
由于RBF神经网络在可以在局部快速逼近非线性函数的特性,采用RBF-PID算法的控制器可在短时间内迭代Kp、Ki、Kd至最佳水平,使系统的超调量为零并且使控制系统达到稳态的时间以及对扰动的响应都非常良好。同时通过图7可以看出,在得到一个新的航向指令后,双推进器可以通过较小的转速差并在较短的时间内就能将航向稳定,反映出艇体的结构设计有利于航向的保持。图9、图10分别为RBF-PID控制器参数和系统雅可比值的迭代曲线。

图9 PID参数迭代曲线Fig.9 PID parameters iteration curve

图10 雅可比值迭代曲线Fig.10 Jacobian value iteration curve
5 结论
设计了一种双体结构的无人测绘艇,在此基础上利用RBF神经网络对PID航向控制器参数进行整定。仿真结果显示,RBF-PID控制器的性能优于单一PID控制器和BP-PID自适应控制器,证明了RBF神经网络结合PID算法对双体无人艇航向控制的有效性,也为接下来无人艇的航线跟随和自主路径规划研究奠定了基础。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
舰船科学技术(2022年10期)2022-06-17
建材发展导向(2021年22期)2022-01-18
新世纪智能(高一语文)(2021年3期)2021-07-16
军民两用技术与产品(2021年2期)2021-04-13
建材发展导向(2019年10期)2019-08-24
民用飞机设计与研究(2019年4期)2019-05-21
小哥白尼·趣味科学画报(2019年12期)2019-02-28
岷峨诗稿(2017年4期)2017-04-20
电子制作(2017年9期)2017-04-17