臂载线结构激光手眼矩阵的精确标定
——多坐标系转换法
2020-07-03 05:38经小龙郭为忠
上海交通大学学报 2020年6期
经小龙, 胡 源, 郭为忠
(上海交通大学 机械与动力工程学院, 上海 200240)
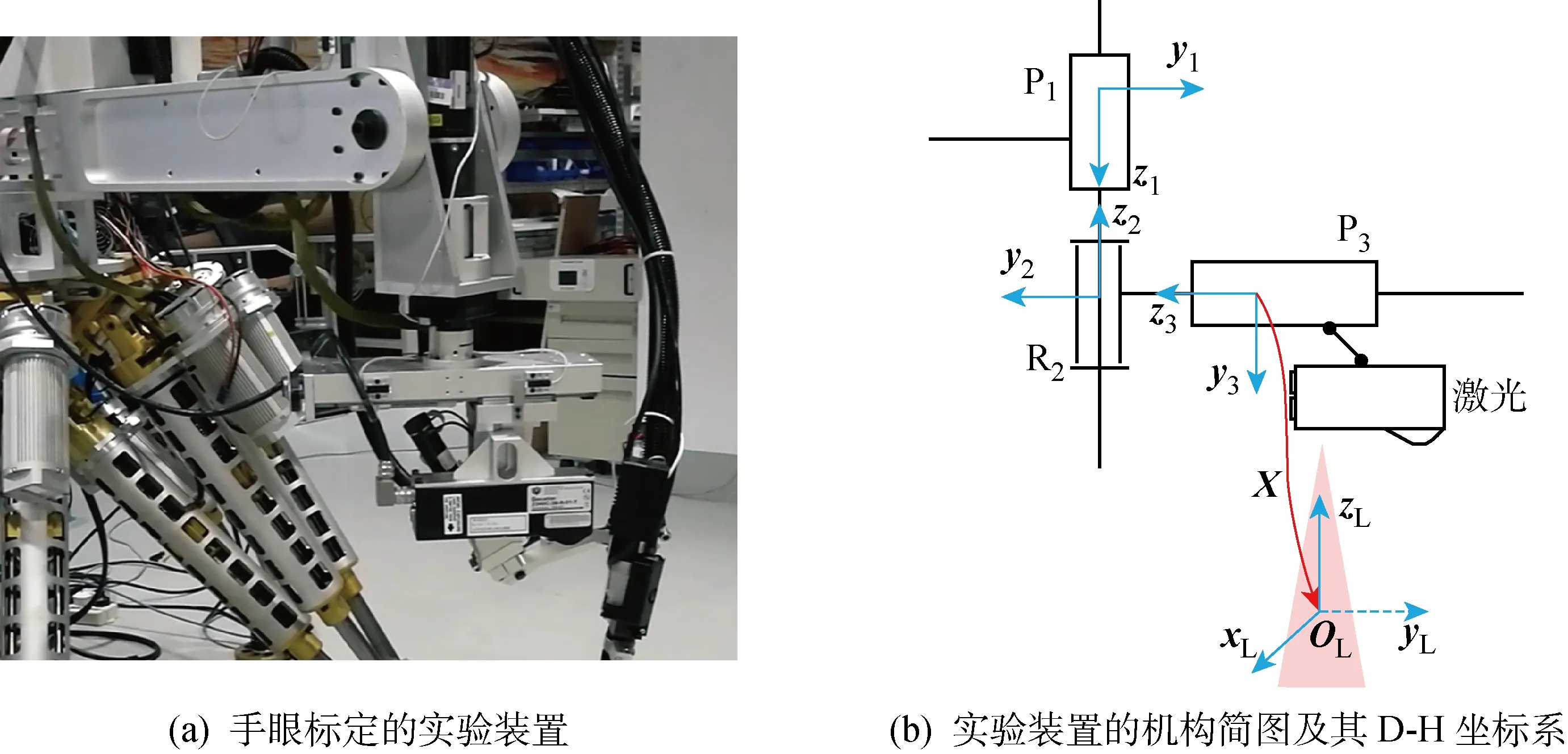
图1 臂装线激光与P1R2P3机械臂的手眼结构
将传感器(摄像头、线结构激光位移传感器)安装于机器人的末端连杆上,构成对环境具有一定感知能力的智能机器人是机器人的主要发展趋势[1].线激光传感器具有高测量速度和高精度等特点,时常用在诸如焊接定位等高精度作业中.但是,线激光传感器每次只能测量激光扫描平面内的二维轮廓信息,实现三维感知则需通过手眼矩阵将这种二维轮廓信息转换为相对于末端连杆坐标系的三维点云信息,然后将三维信息转换到全局坐标系.手眼矩阵的测量过程即为手眼标定,又称为外参标定.
对于传感器的手眼标定,目前最为广泛使用的是建立形如GX=XF的手眼方程[2]后再对其进行求解,但该方法难以直接用于线结构激光的手眼标定.Che等[3]将激光二维坐标系和测量装置扫描轴组合成非正交坐标系,并建立起该非正交坐标系到全局坐标系的数学模型和求解算法,进而求得手眼矩阵.然而,这种方法操作不便、计算复杂,且非正交坐标系变换会引入非线性误差,难以用于线结构激光这种高精度传感器的手眼标定.此外,利用多传感器[4-5]的特点和相关约束关系求解手眼矩阵也受到某些研究者的青睐,但多传感器的使用增加了实验的难度和不确定性.内外参数同时标定[6-8]也获得了广泛的研究,但这对于已进行过内参出厂预标定的线结构激光传感器并无必要,且会增加标定和计算的复杂度.使用立方体3个互相垂直的3条边构成中间坐标系进行手眼标定[9-11],针对特定机器人的手眼标定[12-14]以及手眼标定的相关优化算法[15-17]也受到了较大的关注.针对线激光的手眼标定,最为经典的方法是定点变位姿(FPDP)法[1, 18-19]及其改进方法[20-21],由于其操作和计算的简便与快捷性,受到很多研究者的青睐.但这种方法受到机械臂的制造误差、装配误差、电机回程误差等影响较大,并可能会在某些机构构型的机械臂中失效.此外,文献[22]提出一种利用中间坐标系间接求取手眼坐标系的方法,可消除运动学误差的影响.但是,该方法需要借助一块嵌有9个标准球体的平面基板,操作较为复杂,且难以应用于激光等二维视觉传感器上.

1 臂装线激光的手眼结构
臂装线激光与P1R2P3机械臂的手眼结构如图1所示.线结构激光传感器安装于P1R2P3焊接机械臂的第3个关节P3上.线激光的测量平面为OL-xLzL,其测量结果为线激光坐标系下的二维轮廓
CL={mi=(xi,0,zi),i=0,1,…,k}
(1)
式中:mi为二维轮廓点云的第i个点.
假设手眼矩阵X已知,可通过齐次变换进行三维重建,获得的全局坐标系中的三维点云为
(2)

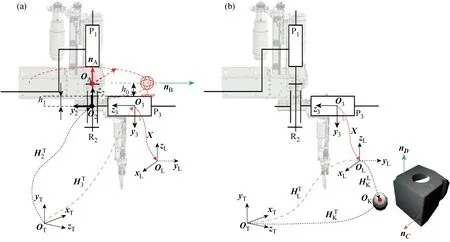
图3 多坐标系转换法原理图
2 定点变位姿法

由于关节位移可通过电机编码器反馈获得, 所以可通过Denavit-Hartenberg (D-H)方法求得球心在全局坐标系下的坐标Qi(i=1,2,…,n).由于标定球和全局坐标系始终保持不变,所以存在关系
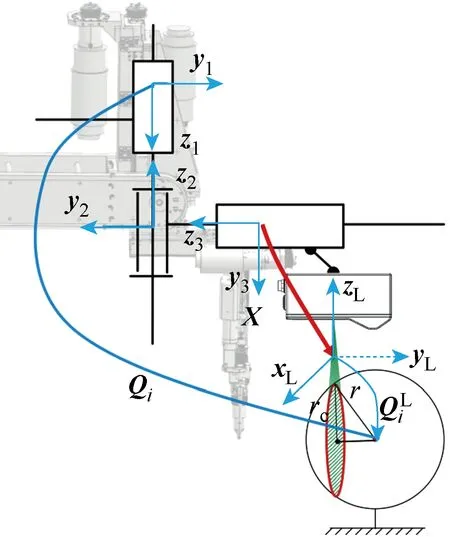
图2 定点变位姿法原理图
通过最小二乘法即可快速求得手眼变换矩阵X.但是,该方法对机械臂本体的制造误差、装配误差、电机回程误差、运动学模型的误差非常敏感,计算结果往往误差较大,无法直接用于高精度点云的三维重建.
3 多坐标系转换法

(5)

(1) 控制转动关节R2旋转使靶球沿圆弧运动,激光跟踪仪记录靶球球心在T中的运动轨迹.通过最小二乘法对轨迹进行拟合,获得该圆弧轨迹的圆心记为OA,圆弧轴线记为nA.
(2) 控制移动关节P3移动使靶球沿直线运动,激光跟踪仪记录其运动轨迹,该直线轨迹所在直线向量记为nB.
(3) 已知靶球球心与关节P3上表面的垂直高度为h0,关节R2的D-H坐标系2原点与关节P3上表面的垂直高度为h1.
则关节R2的D-H坐标系2相对于T的齐次变换矩阵为
(6)
移动关节P3的电机编码器读数为q3,则有
(7)
(3) 将靶球球心位置作为原点,两个法向量分别作为x、y方向的坐标轴,构建临时坐标系K,则该临时坐标系K相对于激光跟踪仪坐标系T的齐次变换矩阵为
(8)
(4) 保持靶球和标准块位置固定不动,记录此时关节P3位移为q30.控制移动关节P3移动,同时线激光不断扫描获得一系列二维轮廓数据,记录每一帧轮廓CL={mi,i=1,2,…,k}及其对应的关节广义输入q3i,通过齐次变换即可得每一帧轮廓在激光坐标系中的坐标为
(9)
由上述所有轮廓线所组成的三维点云为C为
C=∪Ci
(10)

(11)
(12)
最后,根据式(5)即可计算出手眼变换矩阵X.
4 手眼矩阵标定实验
实验机器人为图1所示的P1R2P33自由度串联机械臂,线激光传感器为Gocator2340,其单次扫描轮廓点数为 1 280,测距范围为190~210 mm,测量精度为0.037 mm.为方便比较,可根据手眼矩阵X计算其旋转轴v,旋转角度θ和平移矩阵p,并在4.3节的误差分析中分别用ev,eθ,ep表示各自的测量误差.
(13)
θ=
(14)
(15)
4.1 定点变位姿法标定实验
通过定点变位姿法进行3次标定实验,每次实验测量16组数据,其中1次的测量结果如表1所示.其中:x、y分别为激光所截截圆形轮廓线的圆心坐标;d1、θ2、d3分别为驱动关节P1R2P3的广义输入.
通过式(3)~(4)和式(13)~(15)计算,可获得3次实验的结果分别为
表1 定点变位姿法的一次标定实验数据
Tab.1 One of the experimental data of fixed point from different poses methods
组数x/mmy/mmrc/mmd1/mmθ2/(°)d3/mm116.00-10.93-27.67171.673.3590.92215.12-15.02-26.70172.044.0792.37︙︙︙︙︙︙︙1534.5512.55-18.76180.07-13.3890.18
4.2 多坐标系转换法标定实验
通过多坐标系转换法进行3次标定实验,其过程示意如图4所示,其中1次测量结果如表2所示.
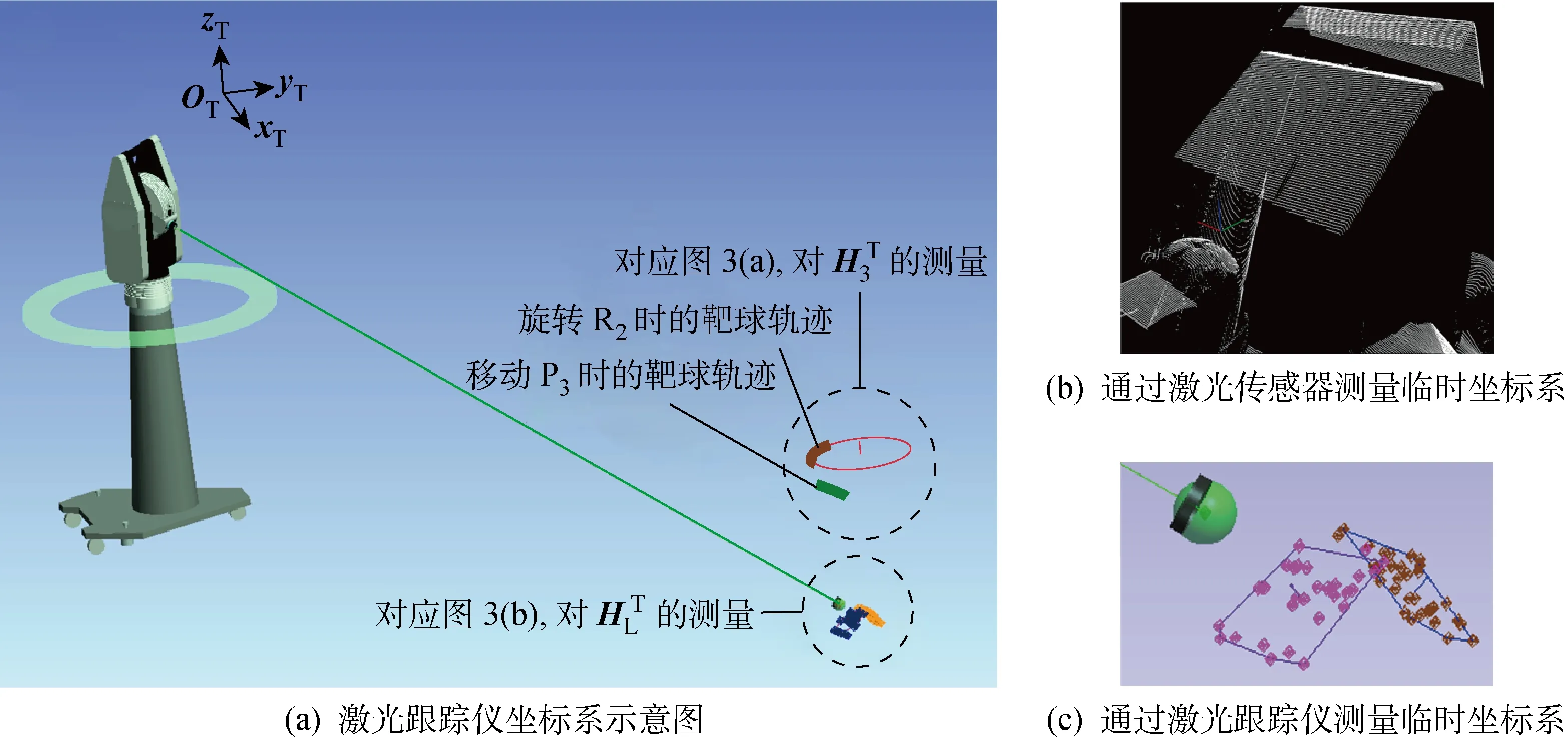
图4 多坐标系变换法测量手眼矩阵实验

表2 MCT法的1次标定实验数据
通过式(5)~(15)计算,可获得3次实验的结果分别为
4.3 实验结果误差分析
下文将分别对定点变位姿法和多坐标系转换法的标定结果进行误差分析,由于事先不知道手眼标定矩阵的准确值,所以取3次实验的平均值作为手眼标定矩阵的无偏估计.由于手眼标定矩阵的旋转矩阵部分和平移矩阵部分量纲不同,所以分别对其旋转轴、旋转角度、平移矩阵进行误差分析.


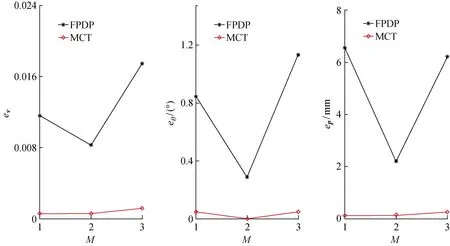
图5 手眼矩的阵旋转轴、旋转角度、平移矩阵误差
由图5可知,FPDP法测量手眼矩阵误差大、精度低、测量结果不稳定.这是由于FPDP法在整个过程中需要不断运动所有关节并多次记录各个关节的广义输入,所以手眼矩阵精度对机械臂关节的加工精度、装配精度、电机回程误差、运动学模型误差等因素非常敏感.这一影响在平移矩阵的计算结果上体现得尤为明显,其平移矩阵的误差甚至达到5 mm以上,这在对精度要求非常高的应用场合是无法接受的.另一方面,其平移矩阵p在y方向的值py=0恒成立,但事实上这不是正确的结果.这是由于FPDP法在求解式(3)时需要将该式转化为形如GX=F的方程,然后再通过最小二乘法求解,但是该方程中矩阵G不满秩,因此造成求解结果中py的缺失.这也是FPDP法的另一缺陷,FPDP法在测量某些机构位型的手眼矩阵时会造成缺项,不具备普适性.
另一方面,使用所提的MCT法测量手眼矩阵,其精度有了极大的提升.在不同的实验条件下,手眼矩阵的计算结果相差极小,各次计算所得的旋转轴线误差ev<0.001,旋转角度误差eθ≤0.07°,位移矩阵误差ep≤0.25 mm,相比于FPDP法,其误差极大地降低了.这是由于在测量过程中,仅需机械臂末端的两个关节产生运动,完全消除了机械臂末端两关节之前的关节加工误差、装配误差、电机误差的影响.此外,最后两个关节仅在最初运动一次后即固定不再改变,并未在整个标定过程中多次取值,因此也极大地减小了因这最后两个关节的误差对结果精度的影响,从而进一步提高了测量精度.此外,MCT法通过借助临时坐标系间接测量手眼矩阵的思想,仅使用最后两个关节之间的D-H参数,不需要最小二乘法求解,不会出现矩阵不满秩而无法计算X某些项的情况,可用于任何二自由度及以上的臂载线结构激光的手眼矩阵的精确标定.
5 结语
本文提出一种用于臂载线结构激光手眼矩阵精确标定的新方法——多坐标系转换法.该方法借助激光跟踪仪和标定物,找到末端连杆坐标系E和线结构激光坐标系L相对于激光跟踪仪坐标系T的齐次变换矩阵,从而间接计算末端连杆与线激光坐标系的手眼矩阵.该方法操作简便、误差小、精度高,并且对实验器材没有严格要求.实验结果显示,由该方法测量所得手眼矩阵的旋转轴误差小于0.001,旋转角度误差小于0.07°,位移矩阵误差小于0.25 mm.经过对比发现,其性能优于传统的定点变位姿法.该方法不受传感器类型的影响,既适用于可获得二维信息的传感器,如线激光,也适用于可获得三维信息的传感器,如三维激光和双目摄像头.此外,该方法不受机构位型的影响,适用于任何两自由度及以上的串联机械臂手眼结构的标定.
猜你喜欢
导航定位学报(2022年2期)2022-04-11
现代电子技术(2022年2期)2022-02-13
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
孩子(2021年4期)2021-04-23
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
火力与指挥控制(2018年9期)2018-10-16
数学大世界(2018年1期)2018-04-12