
“双模式”下的小型水文监测船系统研究
2020-07-04 02:43靳晓东
机电信息 2020年14期

摘要:针对大型水文监测船造价高、灵活性差以及水文监测环境恶劣、人工采样数据不准确等问题,在深入分析了水文监测的实际需求和研究现状,并总结了大量文献后,提出了一款基于遥控和导航“双模式”的小型水文监测船设计方案。该船利用嵌入式技术、无线通信技术、数据采集与传输技术、云服务器搭建与数据库连接技术和自主导航避障技术,可实现船模的遥控、监测、预警和导航功能。其具有制造成本低、操控方便、实用性强等特点,特别适合小规模、复杂水域的监测,具有良好的推广和应用前景。
关键词:嵌入式系统;STM32水文监测;运动控制;自主导航避障;智能技术
0 引言
本文旨在设计一款实用性强的基于遥控和导航“双模式”的小型水文监测船,以完成如下任务:操控人员可在岸边遥控船模进入目标监测区域,抵达后制动发动机,开启监测功能,监测人员可在PC端网页上实时获取水文监测数据,监测完毕后由操控人员遥控船模返航;操控人员也可在遥控器上切换至导航模式,监测人员可以在PC端网页上为船模选择目标区域的经纬度信息,让船模自主导航抵达。在上述两种模式下,船模运动速度均分为高速档和低速档,可在遥控器上切换;均带有预警子系统,一旦采集到船模姿态有翻船风险,就会启动报警,操控人员可以操纵遥控器或由监测人员重新选择目标区域调整船模航行路线或者返航。
1 系统设计
1.1 MCU选型
在本设计中,主控板和外设连接的模块较多,因此本设计采用ST(意法半导体,世界最大的半导体公司之一)公司推出的STM32F103ZET6作为本次设计的控制器芯片。该芯片具有成本低、功耗低、接口丰富、资源充足、实时性好、设计灵活等特点。
1.2 遥控子系统
遥控终端负责给船模档速切换、模式切换、航行方向和传感器监测发送控制指令,也可进行人机交互。本文选用的是采用低电压、高效率,应用广泛的2.4G无线通信技术和PPM(脉冲相位调制)信号的富斯i6遥控器。在富斯i6遥控器与接收机的信号传输过程中,PPM信号把多路PWM信号调制到一路通道上,发送到接收机后再由接收机还原成多路PWM从各个通道输出。
1.3 动力子系统
水文监测船模的动力子系统由电源模块、电机驱动模块和电机模块组成。两个速度分别可调的电机带动船尾的双螺旋桨旋转,进而靠产生的水的反作用力推动船模航行,故电机的选型尤为重要,其直接影响到船模行驶的稳定性。本文选用功率大且重量轻的390直流电机,选用L298N电机驱动模块,电源可以用标准航模锂电池供电。
在直流电机的速度控制中,PWM(脉宽调制)是一种广泛使用且可靠的方法。实际在Keil软件上编程时,通过控制器调节定时器TIM输出通道的比较值来改变输出信号的占空比,进而改变模拟信号电压大小来调节电机转速。在本设计的水文监测船模中,可以通过调节两个电机的转速差来调整船模的航行方向。
1.4 导航子系统
1.4.1 硬件选型
在船模定位方面,本文采用GPS定位技术,选择适应能力强的ATK-S1216F8-BD GPS/北斗模块。在确定了目標监测区域和船模的经纬度信息后,船模当前航向角的调整需要借助于电子罗盘模块的信息采集,可选用动态性能好的AK8975电子罗盘模块。船模在水面航行的过程中,可能会遇到静态或动态的障碍物。考虑到在复杂环境的水域上,如果用超声波测距,外界的风向和温度可能会影响其测量精度,所以本文采用激光测距方式,选用ATK-VL53L0X激光测距模块。该模块具有尺寸小、精度高、测距远、测速快(每秒可以测量50次)等优点,再配合舵机部分(可采用SG90舵机)控制其左右转动,根据采集到的障碍物方位信息,应用数字PID算法调节两个电机的转速,实现避障功能。
1.4.2 软件设计思路
PID算法是一种经典的控制算法,应用极为广泛。相应的改进算法主要有基于模糊控制、智能算法等先进技术的参数整定(比例P、积分I和微分D这3个参数)的改进以及采用积分分离、前馈补偿等方法对控制结构的改进。
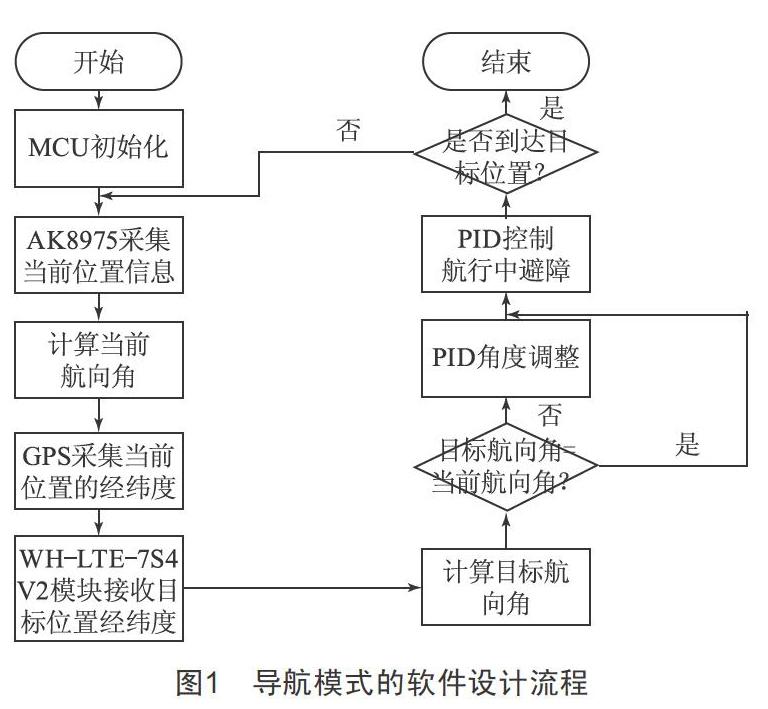
本文设计的水文监测船在导航模式下,处理器接收到GPS模块、电子罗盘模块、激光测距模块和舵机模块采集的船模和障碍物位置信息后,根据接收到的目标监测区域的经纬度信息,将偏差角作为输入,应用改进的数字PID算法编程实现对两个电机转速的控制作为输出,以此来实现船模在水面上的正常行驶和避障功能。
水文监测船导航模式的软件设计流程如图1所示。
1.5 监测子系统
1.5.1 传感器选型
关于水文水质的检测,本文在此仅考虑水的温度、pH和浊度这3个方面(实际应用中可以根据用户需求选用多种类型的传感器来检测更多的水文信息)。相应的传感器选型分别为DS18B20数字温度传感器、E-201-C复合电极和TS-300B浊度传感器,它们具有共同的优点:(1)价格低,体积小;(2)响应快,精度高;(3)接线方便,维护简单[1]。
1.5.2 数据传输模块
在船模获得监测数据后,我们需要得到及时的反馈,将监测数据上传到云服务器供监测人员在PC端网页上实时获取;在导航模式下,同样需要船模接收来自服务器的数据(目标监测区域位置信息),并将其转发至串口设备。为此,我们可以选择支持4G高速接入的WH-LTE-7S4 V2通信模块,该模块支持网络透传、HTTPD Client和UDC 3种工作模式,具有高速率、低延时的特点。
1.5.3 数据库的设计和连接
在本次设计中可以使用MySQL数据库,MySQL是一种关系型数据库管理系统,体积小、速度快而且源码开放。
PHP提供了可与MySQL连接的函数库mysqli,在本设计中可以使用面向对象或过程的语法来创建与主机localhost的连接,通过这种方法可以直接调用这个对象来访问数据库[2]。
本文设计的水文监测船需要将船模系统探测到的数据实时发送到服务器上供监测人员在PC端网页上实时获取,所以需要往MySQL数据库中插入新的数据,然后对数据库进行查询。在这里可以使用mysqli_query()函数,该函数可查询user这个表里的所有数据。
1.6 预警子系统
本文选用通过IIC或SPI接口通信的MPU6050模块提供的俯仰角和横滚角,结合船模位置和当前航向角信息来检测水浪波动情况的水文信息,同时也是在检测船模的姿态,为监测船的航行安全提供保障,因为在复杂的水域环境下,如果水面波动很大,船模随时会有翻船的危险,所以当MPU6050检测到俯仰角或横滚角过大时,应该启动报警,配合板载的蜂鸣器鸣叫和LED闪烁,并把警告信息显示在PC端页面上,提醒操控人员和监测人员及时调整船体运行路线或返航检查。
2 系统移植
UCOSⅢ是一个可裁剪、可固化和可剥夺的多任务系统。由于本文软件系统的设计中涉及的模块数量比较多,考虑到多任务执行效率的问题,故可以对其进行UCOSⅢ系统移植。所谓系统移植,就是指在处理器上可以让UCOSⅢ运行。为了移植起来更加方便,UCOSⅢ的大部分代码都使用C语言编写,重点需要用C语言和汇编语言来编写一些与处理器连接的代码。
3 智能导航
目前,导航智能普遍仍停留在计算智能与感知智能上,即通常利用现有定位系统或已有三维地图数据,系统必须基于这些信息通过一定算法计算出优化后的路径。但如果水文监测船行驶在缺乏上述信号的复杂野外环境以及对抗性强的环境下,现有导航系统就难以发挥作用,因此迫切需要研发智能导航系统。智能导航控制系统结构如图2所示。
路径规划算法研究是船模导航系统研发不可或缺的一部分。目前较为常用的路径规划算法,如Dijkstra算法、蚁群算法、遗传算法、人工势场法等,由于它们或多或少存在一些不足,尤其是一些智能算法目前的理论研究并不完善,所以实际应用的方法大多数是基于上述基本算法的改进或者多种基本算法的融合。
在智能导航系统设计中,可采用智能避障专家系统,即通过水文监测船航行经验和规则的搜集、整理以及概念化和形式化處理,再辅以模糊技术、神经网络技术等专家系统技术,对航行中遇到的各种情况进行分析判断,给出合理的避障方案,保证航行安全。
机器智能通常分为3类,即计算智能、感知智能与认知智能。认知智能是机器与人类智能最为接近的高级智能。在定位信号缺失的情况下,认知智能可以使水文监测船的智能导航系统像人脑一样进行理解与思考,即通过快速识别周围水域环境自动规划最优路径,其是未来智能导航的发展趋势。但目前智能导航在认知智能方面普遍存在瓶颈,认知智能技术一旦得到突破,将为智能导航领域带来重大变革。谷歌DeepMind团队参与提出的人工智能空间自导航能力即是认知智能的一种突破,将其应用于水文监测船的智能导航系统,将有效改善导航系统中的智能程度[3]。
4 结语
本文针对如今的水文监测形势,提出了一款可以适用于复杂水域环境监测的“双模式”小型水文监测船设计方案,对船模整体的遥控子系统、动力子系统、导航子系统、监测子系统和预警子系统的硬件选型和软件设计思路进行了总结。本文设计的小型水文监测船实用性很强,可大范围推广,有着良好的市场前景。相信随着人工智能理论和应用技术的深入发展,水文监测船的智能导航系统研发还会取得突破性进展,在实际应用效果上将会有“质”的提升。
[参考文献]
[1] 李世林.水文监测遥控船控制及监测系统设计与实现[D].沈阳:沈阳工业大学,2018.
[2] 肖维明.基于PHP+MySQL的网站开发[J].物流工程与管理,2009,31(6):90-92.
[3] 刘峰.AI技术在智能导航中的智能化模式研究[J].软件导刊,2018,17(9):40-42.
收稿日期:2020-05-06
作者简介:靳晓东(1998—),男,河北人,研究方向:智能科学与技术。
猜你喜欢
山东工业技术(2016年23期)2016-12-23
青春岁月(2016年22期)2016-12-23
电脑知识与技术(2016年27期)2016-12-15
电脑知识与技术(2016年24期)2016-11-14
计算机教育(2016年7期)2016-11-10
计算机教育(2016年7期)2016-11-10
企业导报(2016年14期)2016-07-18
企业导报(2015年15期)2016-01-18
现代电子技术(2014年10期)2014-07-19
