基于模糊神经网络的高精度电机自抗扰控制*
2020-09-01 02:08于巍巍杨成山郑广瑜
弹箭与制导学报 2020年2期
何 静,肖 建,倪 亮,于巍巍,杨成山,郑广瑜
(上海无线电设备研究所, 上海 201100)
0 引言
太赫兹雷达采用二维交流伺服电机控制发射面天线运动,以实现雷达的波束精确指向控制。需要电机具备控制精度高、过载能力强、响应速度快以及鲁棒性高等优点。采用传统的PID控制算法稳定性较差,容易产生超调,抗干扰性能较低,从而影响雷达的测量精度。
自抗扰技术(ADRC)[1]是采用误差反馈方法,通过采用ESO对电机中未知及难以处理的扰动加以观测和补偿,从而提高系统精度和抗干扰性[2]。然而在实际系统实现过程中,ADRC算法涉及的可调参数太多,需要通过不断实践选取合适的参数才能使系统达到一个好的效果。文献[3-5]提出结合模糊控制的优势来解决ADRC参数难以确定等不足。但模糊控制中的模糊推理是根据一定的经验来进行推断,其不免局限性且不能使控制系统达到最优。
为了提高交流伺服电机的适应能力和抗干扰性能,文中提出一种基于模糊神经网络的高精度交流伺服电机的自抗扰控制方法,通过运用模糊神经网络的自学习优点,解决模糊控制中需要通过一定的摸索经验来调节参数的问题,并且结合自抗扰控制优点,有效提高交流伺服电机的控制精度及抗干扰性。
1 交流伺服电机的数学模型
交流伺服电机等效框图如图1所示。
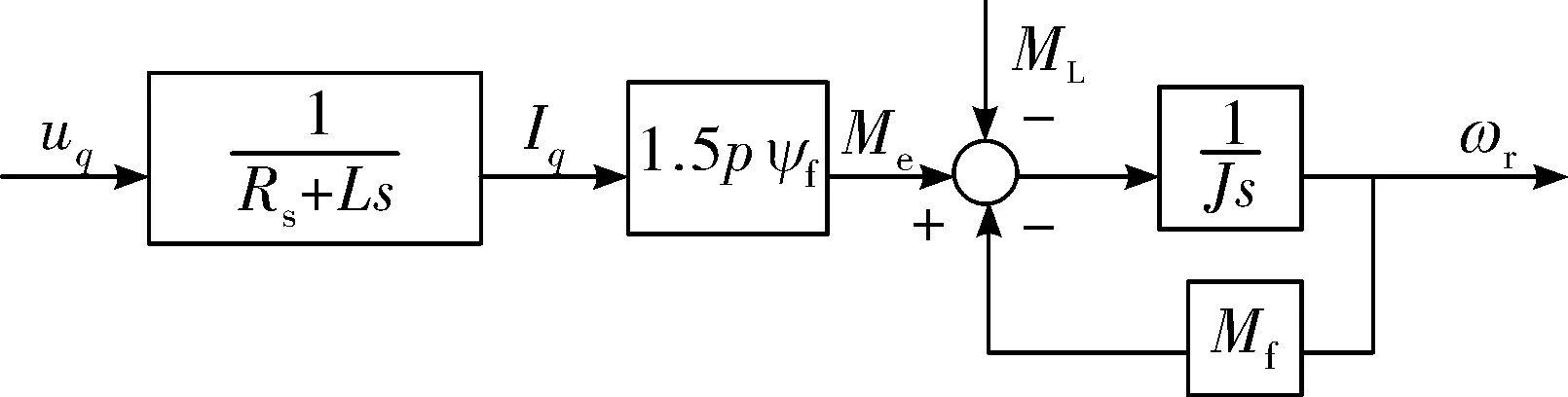
图1 交流伺服电机等效框图
2 控制系统设计
2.1 系统总体框图
采用基于模糊神经网络的高精度电机的自抗扰控制的系统控制部分主要由自抗扰控制和模糊神经网络控制两部分组成。自抗扰控制用于观测位置扰动,并根据输入位置误差进行反馈和补偿;模糊神经网络用于调节自抗扰控制中关键参数,从而使系统达到自适应调节的目的。系统的其它部分采用Id=0及SVPWM控制策略。整个系统框架如图2所示。
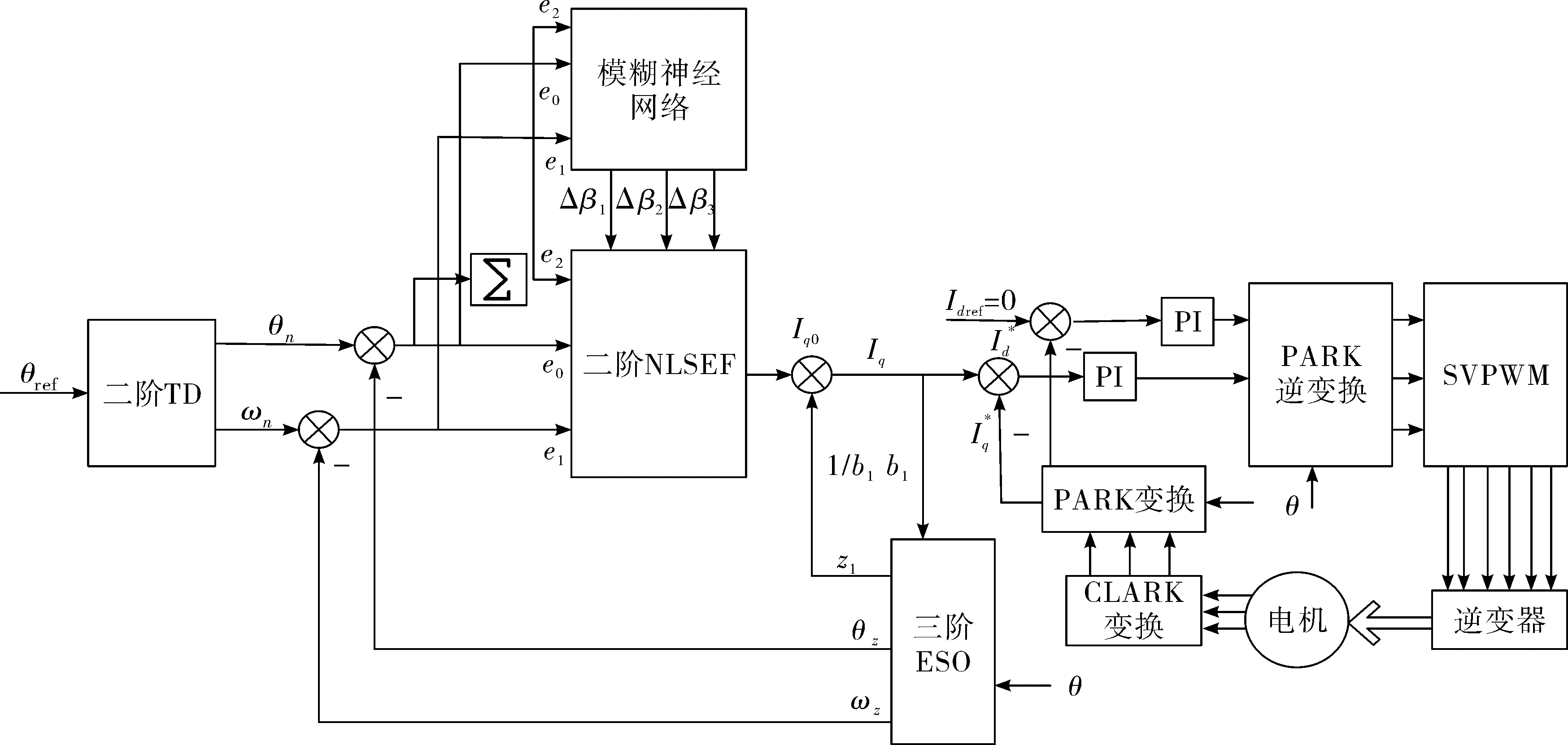
图2 系统控制总体框图
2.2 自抗扰控制
自抗扰控制部分主要分为3个部分[6]:跟踪-微分器(TD);扩张状态观察器(ESO);非线性状态误差反馈(NLSEF)。跟踪-微分器(TD)为根据参考位置信息分解出供NLSEF参考的过渡位置和速度;扩张状态观察器(ESO)用于根据电机反馈的位置信息及内部状态信息估计出系统的反馈位置和速度;非线性状态误差反馈(NLSEF)通过比较TD和ESO的输出误差,再根据当前系统状态计算出实际反馈量。整个自抗扰控制部分连接如图3所示。
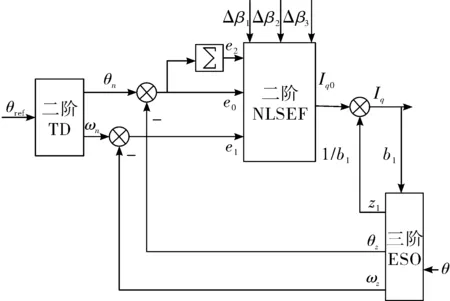
图3 自抗扰控制连接图
二阶跟踪微分器TD设计如下[7]:
fh=rfal(θn-θref,α,h0)
(1)
θn(k+1)=θn(k)+g·ωn(k)
(2)
ωn(k+1)=ωn(k)-g·fh
(3)
式中:fal如公式(4)所示;r为速度因子;α为非线性因子;h0为TD的滤波因子;θref为参考的输入角度;θn为根据θref安排的过渡过程;ωn为θn的微分形式;g为积分步长。
(4)
式中:ε为角度误差;α为非线性因子,0<α<1;σ为滤波因子;δ>0;sign为符号函数。
三阶扩张状态观测器(ESO)设计如下:
e(k)=θz(k)-θ(k)
(5)
fe=fal(e(k),0.5,δ)
(6)
fex=fal(e(k),0.25,δ)
(7)
θz(k+1)=θz(k)+h(ωz(k)-β01e(k))
(8)
ωz(k+1)=ωz(k)+h(z1(k)-β02fe+b1Iq(k))
(9)
z1(k+1)=z1(k)+h(-β03fex)
(10)
式中:θz(k)和ωz(k)为第k个运算周期的电角度和角速度估计值;θ(k)为实际电角度反馈值;z1(k)为扰动的观测值;fal为公式(4)所示;β01、β02、β03为各阶状态观测器系数;h为位置环控制周期;Iq(k)为第k个周期的电流输出值;b1为Iq(k)反馈系数;δ为滤波因子。
非线性状态误差反馈(NLSEF)设计如下:
e0(k)=θn(k)-θz(k)
(11)
e1(k)=ωn(k)-ωz(k)
(12)
(13)
Iq0(k)=β0fal(e0,α0,δ)+β1fal(e1,α1,δ)+
β2fal(e2,α2,δ)
(14)
Iq(k)=Iq0(k)-z1(k)/b1
(15)
式中:θn(k)和ωn(k)为TD中第k个运算周期的电角度和电角速度过渡参考值;θz(k)和ωz(k)为ESO中第k个运算周期的电角度和角速度估计值;β0、β1、β2分别为误差函数fal的不同增益,fal如公式(4)所示;α0、α1、α2为非线性因子;z1(k)为扰动的观测值。
2.3 模糊神经网络
由于自抗扰控制部分的主要控制参数β0、β1、β2对系统的影响较大,因此采用模糊神经网络根据输入误差信号e0、e1、e2的大小,通过误差反向传播来调节模糊神经网络权值,从而达到对控制参数β0、β1、β2自适应调节的目的。
2.3.1 模糊神经网络分层
模糊神经网络分为5层,整个框图如图4所示。
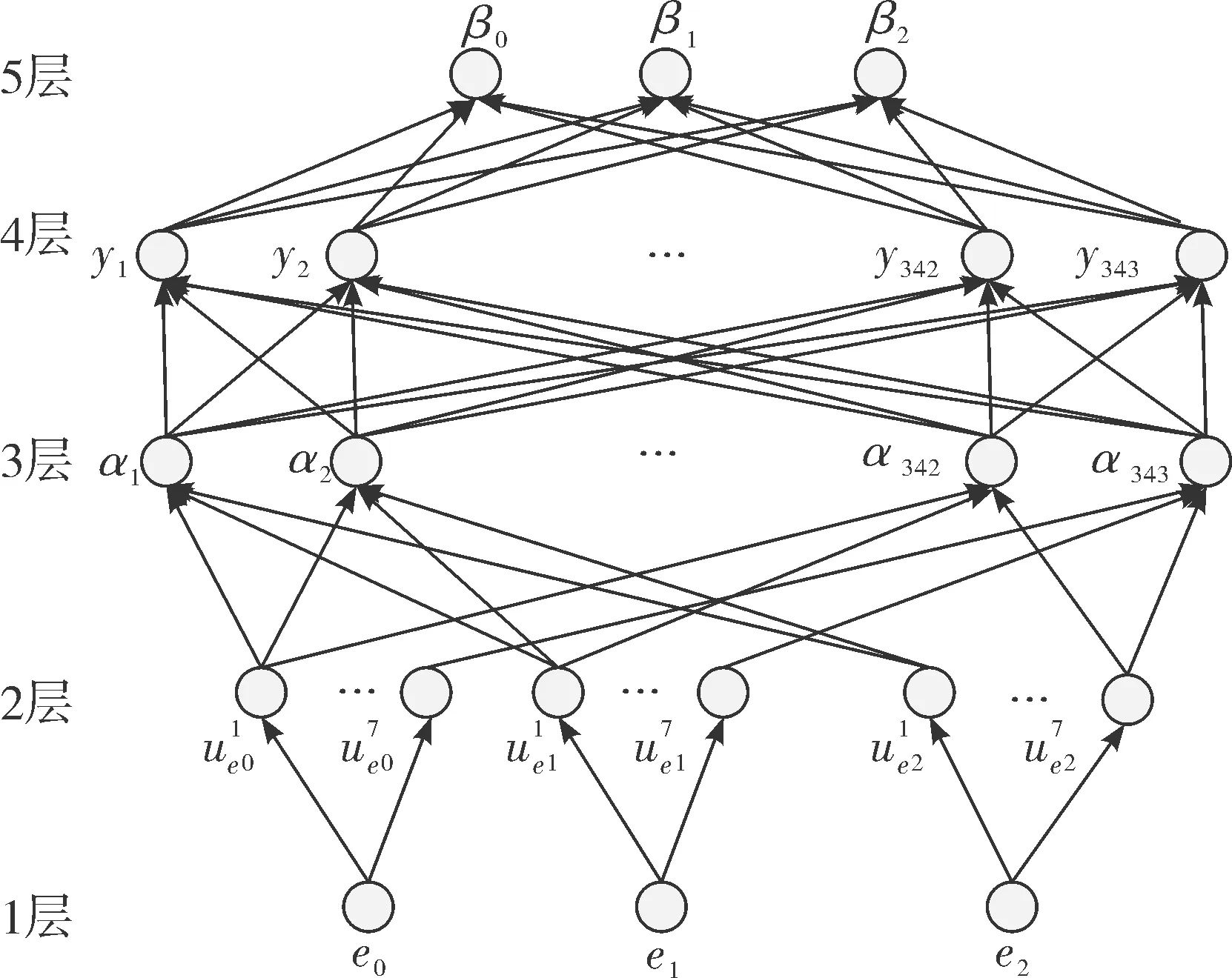
图4 模糊神经网络结构图
第一层为输入层,为自抗扰控制中NLSEF的输入:e0、e1、e2是精确值,节点数N1=3。
第二层为输入变量的隶属函数层,为输入e0、e1、e2的隶属函数ue0、ue1、ue2,实现输入变量的模糊化,节点数N2=21,采用式(16)所示三角隶属函数。
(16)
第三层为“与”层,为隶属函数ue0、ue1、ue2的模糊规则输出αi。该层节点个数为模糊规则数。该层每个节点分别与第二层隶属函数ue0、ue1、ue2相连,共有7×7×7个节点,即343条模糊规则。模糊规则具体如下所示:
ife0is NB ande1is NB ande2is NB thenαi
第四层为“或”层,其为神经网络的加权输出yij,节点数为7×7×7×3=1 029。
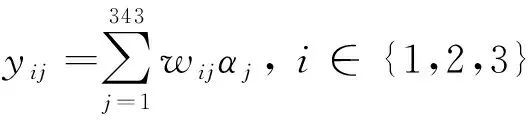
(17)
第五层为清晰化层,输出为自抗扰控制参数β0、β1、β2,节点数为3。该层与第四层的连接为全连接,它将第四层各个节点的模糊值转换为精确值。
(18)
2.3.2 误差反向传播
模糊神经网络需要通过误差反向传播来调节权值wij,从而使得输出参数β0、β1、β2达到最优。误差反向传播采用最速梯度下降法。输入数据为自抗扰控制TD中的(θn(k),ωn(k)),输出为(θz(k),ωz(k)),需要调节的网络权值为wij。故误差总和E对wij微分得:

(19)
3 系统仿真及结果分析
3.1 系统仿真
系统采用Matlab中的Simulink进行仿真。其中系统仿真如图5所示。
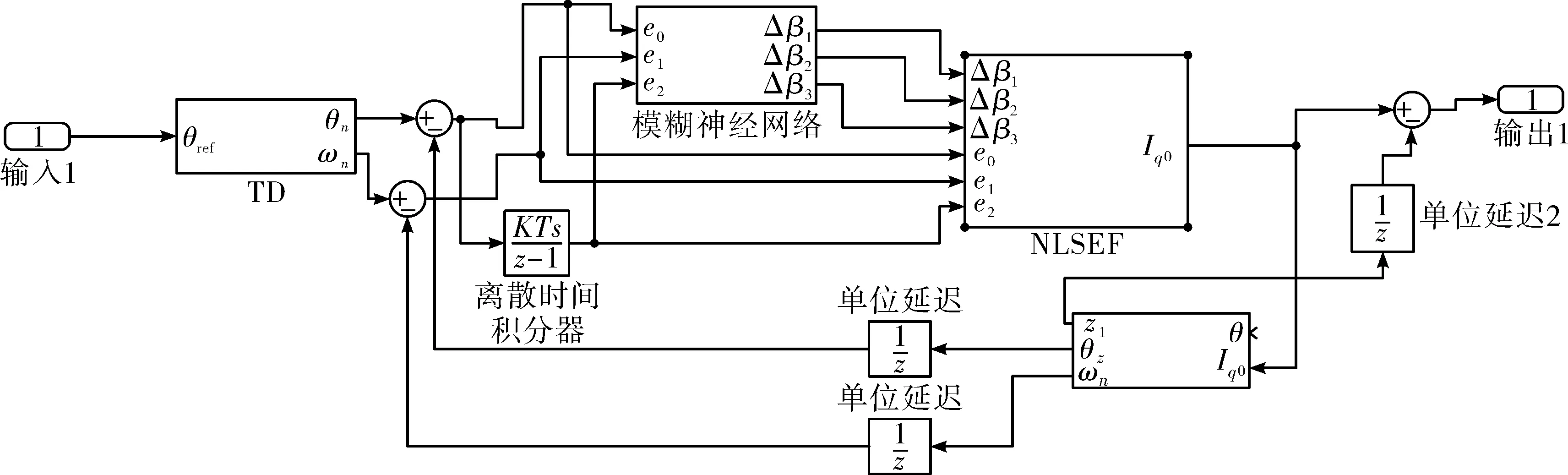
图5 基于模糊神经网络的自抗扰控制仿真图
仿真图中,TD由式(1)~式(3)组成,其根据经验设定为:r=0.6,α=0.7,h0=1.6,g=1.6;ESO由式(5)~式(10)组成,根据经验设定为:β01=1.4,β02=1.7,β03=1.3,δ=0.03;NLSEF由式(11)~式(15)组成,根据经验设定为:α0=0.2,α1=0.2,α2=0.2;模糊神经网络由式(16)~式(19)组成,初始值设置为β0=1.6,β1=18,β2=4.7。
给定输入初始角度为0.75 rad,负载力矩为0 N·m,然后在0.1 s后施加4 N·m的力矩。采用普通PID方法及基于模糊神经网络的自抗扰控制方法的仿真图分别如图6、图7所示。
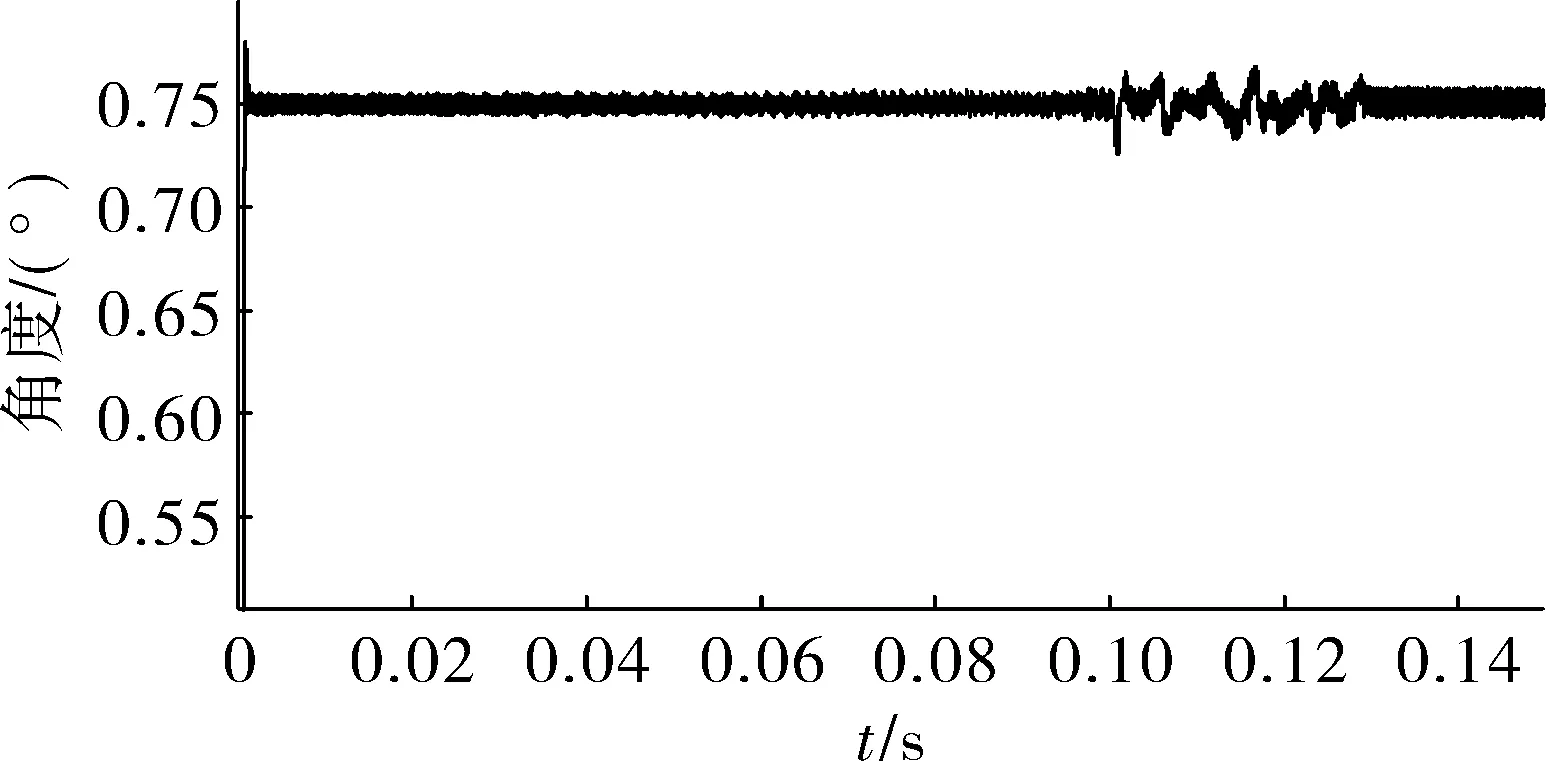
图6 采用普通PID方法的仿真图
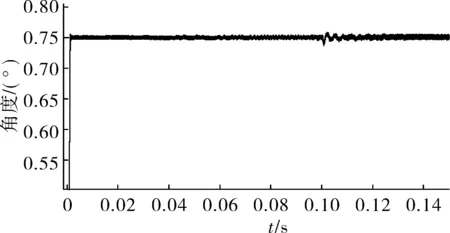
图7 采用基于模糊神经网络的自抗扰控制方法的仿真图
由两图对比可以看出,采用基于模糊神经网络的高精度交流伺服电机的自抗扰控制算法能大幅减少系统的超调量,且提高系统的控制精度和抗干扰性能。
3.2 实验测试
采用具有强大运算能力的ARM+FPGA架构的zynq7035作为控制芯片,将控制算法移植到芯片中进行实验。为验证系统的动态响应能力,使电机在指定角度(174°~198°)内迅速来回摆动,以验证其快速加速、稳定速度、迅速刹车及克服电机内部不确定因素等动态响应的性能。采用普通PID参数控制与采用基于模糊神经网络的自抗扰控制的输入输出对比及误差图如图8 和图9所示。从中可以看出,采用普通PID算法时响应曲线具有较大的畸变,且摆动周期会变化,系统误差较大;采用基于模糊神经网络的自抗扰控制后,系统相应曲线的畸变很微小,且摆动周期与输入完全相符,系统误差很小。
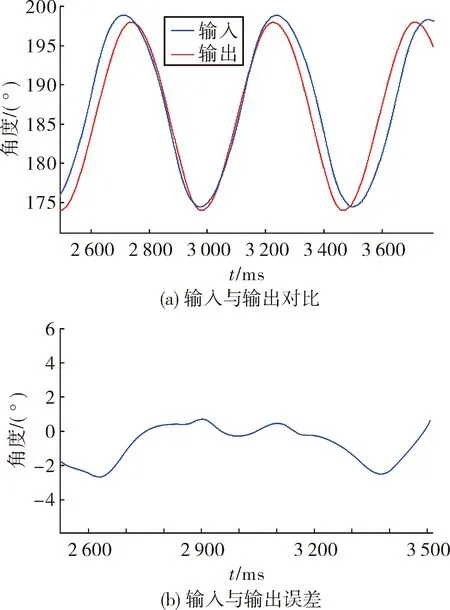
图8 采用普通PID方法输入与输出对比及误差图
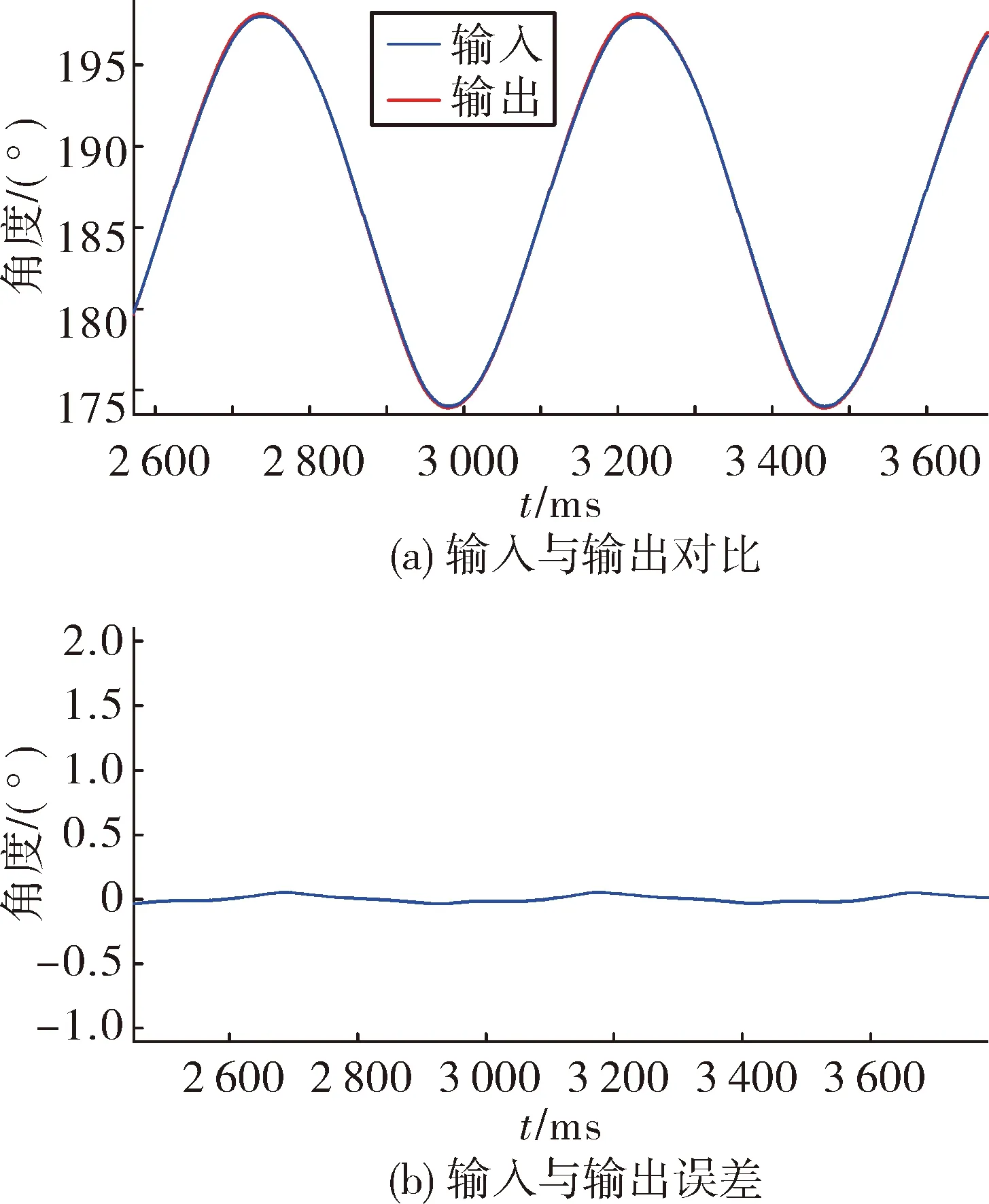
图9 采用基于模糊神经网络的自抗扰控制方法输入与输出对比及误差图
4 结束语
针对传统PID控制算法控制精度不高,容易产生超调现象,抗干扰性能较差的缺点,设计了一种基于模糊神经网络的高精度交流伺服电机的自抗扰控制方法,通过模糊神经网络的自学习功能,解决了模糊控制中需要通过一定的摸索经验来调试参数的问题,最后通过系统仿真及实验测试,验证了该方法在提高交流伺服电机的控制精度及抗干扰性能的实用性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年2期)2022-03-09
北京航空航天大学学报(2021年4期)2021-11-24
发明与创新·中学生(2020年1期)2020-08-03
汽车维修技师(2019年7期)2020-01-16
信息技术时代·上旬刊(2019年4期)2019-09-10
发明与创新·小学生(2018年7期)2018-08-06
汽车维修技师(2018年11期)2018-05-11
软件(2017年6期)2017-09-23
中学生数理化·高一版(2017年1期)2017-04-25