民用无人驾驶航空器适航标准框架初步研究
2020-11-08 06:32郝志鹏刘薇薇
无人机 2020年8期
郝志鹏,刘薇薇
中国民航科学技术研究院
无人驾驶航空器适航标准建设是开展无人驾驶航空器适航审定的基础。本文首先考察国外无人驾驶航空器适航标准制定情况,然后提出我国2.0版无人驾驶航空器适航标准框架的建议。建议的框架包含两个层次,一是基于风险、分级施策、区分构型、通用化矩阵式、模块化层次,二是专题性、具体化基石性层次。两个层次紧密结合,形成完整的2.0版无人驾驶航空器适航标准框架。
总体而言,适航审定有两大支柱,在有人驾驶航空器方面,一是CCAR-21部民航规章规定的管理规范,二是CCAR-23/25/27/29/31/33等部民航规章和部分咨询通告规定的适航标准。前者通常由管理程序予以细化和落实,后者通常由咨询通告给出局方接受的符合性方法。
无人驾驶航空器适航审定同样需要管理规范和适航标准作为支柱。管理规范方面,制定中的CCAR-92部民航规章规定了审定的管理要求,作用等同于CCAR-21部。适航标准方面,目前除以民航适发文件形式予以试行、面向行业急需的高风险货运固定翼无人机、中高风险无人直升机两项标准,并无类似CCAR-23部等适航技术规章。而由于适航标准是无人驾驶航空器必须符合的最低安全性要求,有必要制定无人驾驶航空器的适航标准,为无人驾驶航空器适航审定提供技术标准依据。本文旨在梳理国内外无人驾驶航空器适航标准的发展趋势,提出基于风险、面向需求的民用无人驾驶航空器适航标准框架建议。
需要指出的是,不同于有人驾驶航空器,无人驾驶航空器运行需依赖地面控制站(Control Station,CS)、指挥控制(Command and Control,C2)链路。因此,无人驾驶航空器的适航审定对象应包括C2和CS在内的完整系统,以及《民用无人机产品适航审定管理程序(试行)》所定义的无人驾驶航空器产品和零部件。

图1 CCAR-21部以及CCAR-23/25/27/29/31/33 等部民航规章和部分咨询通告是有人驾驶航空器适航审定的两大支柱。
国外民用无人驾驶航空器适航标准梳理
目前,国外活跃的适航标准制定机构既有国际民航组织(International Civil Aviation Organization,ICAO)、欧洲航空安全局(European Union Aviation Safety Agency,EASA)、美国联邦航空管理局(Federal Aviation Administration,FAA)等民航监管部门,也有美国国际试验与材料协会(American Society for Testing and Materials International,ASTM International)、航空无线电技术委员会(Radio Technical Commission for Aeronautics,RTCA)、国际自动化工程师协会(Society of Automotive Engineers International,SAE International)、无人系统规章制定联合体(Joint Authorities for Rulemaking on Unmanned Systems,JARUS)、欧洲民航设备组织(European Organization for Civil Aviation Equipment,EUROCAE)、国际标准化组织(International Organization for Standardization,ISO)等标准制定组织。由于面临的问题、所持的观点、服务的对象、实现的目标等均不相同,民航监管部门和标准编制机构制定的无人驾驶航空器适航标准在适用范围、颗粒度等方面存在诸多差异。
ICAO遥控驾驶航空器系统适航标准
因监管职能的定位,ICAO要求按照仪表飞行规则(IFR)运行、融入管制空域和管制机场的遥控驾驶航空器系统(Remote Piloted Aircraft System,RPAS)应当满足适航标准。同时由法律地位决定,各缔约国制定本国国家适航规范时,应当以ICAO制定的适航标准为基准,且国家适航规范所规定的适航水平,至少实质上必须等效于ICAO给出的概括性标准所预期达到的总体水平,如与ICAO各项标准不相适应,缔约国必须采用至少能达到等效安全标准的附加要求。同时,ICAO制定的适航标准不包括各缔约国本国国家适航规范所应包含的定量规范,这部分标准须由各缔约国确定、通过或接受的要求予以补充。ICAO的适航标准主要集中在公约附件8。目前,ICAO的遥控驾驶航空器系统工作组(Remote Piloted Aircraft System Panel,RPASP)正在修订附件8,增加针对RPAS的要求。本次修订内容主要体现在新增的三个部分,分别是第VIII部分遥控驾驶飞机(Remote Piloted Airplanes,RPA)、第IX部分遥控驾驶直升机(Remote Piloted Helicopters,RPH)和第X部分遥控驾驶站(Remote Piloted Station,RPS)。RPASP编写这三部分内容时,是在现有的有人驾驶航空器标准和建议措施基础上略作修改,引入遥控驾驶飞机、遥控驾驶直升机、遥控驾驶站的规定。第VIII部分规定是在现有第V部分小型飞机的第VB部分基础上,稍作修改以适用于遥控驾驶飞机。第IX部分的规定是基于现有第IV部分直升机的第IVB部分,稍作修改以适用于遥控驾驶直升机。第X部分则是基于现有第VI部分发动机、第IIIB和第IVB部分并稍作修改。上述策略很好地照顾到附件文本的一致性,以及无人驾驶航空器作为航空器和有人驾驶航空器在技术属性上的相似性。同时,为照顾各缔约国情况,ICAO标准通常非常粗略和顶层,这一策略也使得新增的三个部分无需深入无人驾驶航空器特有技术的细节,例如系统和设备部分。但是,这个策略并没有覆盖无人驾驶航空器型别中常见的多旋翼构型,动力系统也仅涉及传统燃油发动机。
FAA和EASA 无人驾驶航空器适航标准
FAA和EASA的无人驾驶航空器标准既有共性也有差异。
共性之一是FAA和EASA均未对无人驾驶航空器颁布独立的适航规章,二者均认为在现行有效的有人驾驶航空器适航规章基础上做适应性删改,同时有针对性地对无人驾驶航空器特有技术的适航要求进行增补,即可满足当前的审定需要。例如,EASA在第2019/945号授权法案指出,审定类无人驾驶航空器应当符合第2012/748号欧盟条例、第2015/640号欧盟条例和第2014/1321号欧盟条例中的适用要求,而这三个欧盟条例正是有人驾驶航空器适航审定的依据。
差异则是FAA目前尚未公开提出制定、颁布无人驾驶航空器适航标准的规划,而EASA却在其年度安全计划中公布了无人驾驶航空器适航标准的制定和颁布规划。目前可见的FAA予以公开的适航要求仅是公布在联邦公告(Federal Register,FR)上征求公众意见的西贝尔S-100无人直升机的审定基础,且该审定基础并没有给出对C2链路、控制站的适航要求。据笔者与FAA交流了解,FAA未来可能采取的模式甚至是,一个型号一个标准(审定基础)。不排除FAA在这种模式下,通过积累多个无人驾驶航空器型号的审定经验,最终归纳出无人驾驶航空器的通用适航标准。这也比较符合FAA设立多个无人驾驶航空器试验区和试点项目,广泛开展技术探索和经验积累的现行策略。EASA则是在JARUS起草的无人驾驶航空器系统审定规范(Certification Specification for Unmanned Aircraft Systems,CSUAS)基础上,计划针对审定类无人驾驶航空器制定颁发CS-UAS和轻型无人驾驶航空器系统审定规范(Certification Specification for Light Unmanned Aircraft Systems,CS-Light UAS)。
共性之二是,针对最大起飞重量小于25kg的小型无人驾驶航空器应当符合的技术标准,FAA和EASA均有清晰、明确的要求。针对小型无人驾驶航空器的安全性标准,FAA主要依据2018年美国国会颁布的《FAA重新授权法案》(下称2018年法案)。2018年法案规定,小型无人驾驶航空器设计、生产和改装应当符合基于风险、协商一致的安全标准。FAA应当建立接受上述标准的过程,并对按照局方接受的、协商一致的安全标准完成设计、生产或改装的小型无人驾驶航空器,建立运行批准的过程,以及授权制造商按照局方接受的、协商一致的安全标准对小型无人驾驶航空器进行自我认证的过程。如此一来,小型无人驾驶航空器可以不用取得FAR 21部的型号合格证和适航证。目前,上述小型无人驾驶航空器标准制定工作主要由美国国际试验与材料协会第F38工作组承接,工作范围涵盖适航、运行、人员、通用四个方面。对于小型无人驾驶航空器,EASA将其置于开放类运行下,并对第2019/945号授权法案附件中的C0~C4五类,给出具体技术标准要求,主要包括重量、速度、高度的限制,以及远程身份识别、地形感知的功能等要求。C0级小型无人驾驶航空器的最大起飞重量小于250g,最大巡航速度为19m/s,在起飞点以上的最大飞行高度应小于120m;C1级小型无人驾驶航空器在C0级基础上,最大起飞重量提升到小于900g,或撞击人体头部的能量小于 80J;C2级小型无人驾驶航空器取消了飞行速度限制,最大起飞重量小于4kg;C3级小型无人驾驶航空器最大起飞重量应小于25kg;C4级小型无人驾驶航空器在C3级基础上取消了飞行高度限制。
标准制定组织的工作
ASTM International、RTCA、SAE International、JARUS、EUROCAE、ISO等机构是目前最具代表性的无人机技术标准制定组织(Standards Developing Organization,SDO),制定的标准涵盖无人机产品、运行及人员等诸多方面。然而,在笔者与FAA等局方交流中,普遍感到站在局方角度,SDO标准也存在局限性、相互竞争的不足。对于这种状况,目前出现了标准整合的趋势。其中比较典型的是,美国国家标准学会(American National Standard Institute,ANSI)成立了无人驾驶航空器系统标准化合作体(Unmanned Aircraft Systems Standardization Collaborative,UASSC),并发布了无人机系统标准化路线图。UASSC并非标准编写机构,其目的是全面梳理、分类归纳已有的无人驾驶航空器标准,并从中识别出缺少标准覆盖的地方,标识相应的优先级,指导SDO的活动。在适航标准方面,UASSC将标准分类归纳为设计制造、系统安全、质量控制、航电系统、电气系统、能源与推进系统、噪声排放、维修检查、自动化、自主人工智能、小型无人驾驶航空器降落伞等方面。其中,航电系统标准又进一步分为指挥控制与通信、导航、感知与规避、软件、飞行数据与语音记录、网络安全等方面。严格来说,航电系统、电气系统、能源与推进系统都是无人驾驶航空器的分系统,无人驾驶航空器设计制造标准应当予以覆盖。由于设备相对独立等原因,有人驾驶航空器相关系统的产品标准例如TSO,就独立于整机适航标准之外,并可以作为符合整机标准的证据,亦可以单独取证。考虑到同一设备可以同时用于无人驾驶航空器和有人驾驶航空器,以及单独取证的需求,无人驾驶航空器系统的航电系统、电气系统、能源与推进系统的适航标准可以沿用独立定标的模式。
图2 2018 年12月ANSI发布《1.0 版无人机系统标准化路线图》。
图3 ANSI于2020 年6月发布《2.0 版无人机系统标准化路线图》。
综上所述,国外无人驾驶航空器产品适航标准建设,呈现出“两头动作频频,中间按兵不动”的发展态势。不过,FAA、EASA也在积极参与、影响着ICAO和SDO的标准编制活动,并以此为基础制定未来本国的无人驾驶航空器适航标准。
国内民用无人驾驶航空器适航标准框架制定情况和建议
借鉴国外民用无人驾驶航空器适航标准的建设思路,下功夫雕琢中国本国的无人驾驶航空器适航标准,才能真正服务我国无人机产业,同时寻求取得与国外标准并驾齐驱的地位,推动中国适航标准走向国际化,助力中国无人驾驶航空器产品蓬勃发展,逐步摆脱有人驾驶航空器适航标准“跟跑”状态,最终实现中国适航标准与国外先进局方适航标准“并跑”乃至部分“领跑”的目标。
目前,我国民用无人驾驶航空器适航标准框架经过无人机适航审定试点项目的实践、《高风险货运固定翼无人机系统适航标准(试行)》和《中高风险无人直升机系统适航标准(试行)》两份文件的编发,以及无人机适航专家组的研讨,已具备对1.0版进行修订的条件。以下对2.0版民用无人驾驶航空器适航标准框架的制定提出建议。
关于框架原则的考虑
制定民用无人驾驶航空器适航标准框架,首先应当明确制定原则。民用无人驾驶航空器适航标准框架的制定原则可从以下几方面考虑。
(1)基于风险
首先需要明确,风险并非全新事务,有人驾驶航空器的适航标准本质上也是基于风险等级而制定,只不过以保护机上乘员为主。与之相比,无人驾驶航空器的风险指向第三方,且范围更广,包括地面人员、地面设施、空中航空器等。无人驾驶航空器的适航标准应当基于上述第三方的风险和危害制定,而非照搬有人驾驶航空器的适航标准。
(2)分级施策
无人驾驶航空器风险等级不同,应当符合的适航标准严苛程度也不同。风险低,危害小,适航标准的严苛程度低;风险高,危害大,适航标准的严苛程度高。
(3)区分构型
航空器构型差异意味着航空器应当遵循不同的安全性要求,即适航标准,例如CCAR-23部针对固定翼飞机,CCAR-27部针对旋翼机。无人驾驶航空器的构型更加多样化,除典型的固定翼、直升机,还有多旋翼、复合翼、倾转旋翼、涵道风扇等构型,极大丰富了航空器构型谱系。构型差异带来气动、结构、控制、动力等差异,相应的安全性要求亦不尽相同,必然要求适航标准反映这些差异。

图4 无人驾驶航空器的适航标准应基于地面人员、设施及航空器的风险及危害而制定。
(4)通用化和具体化相结合
无人驾驶航空器的技术发展飞快,产品迭代很迅速。而原有的有人驾驶航空器适航标准的模式对指标细节规定比较细,且因规章修订起来比较困难,导致不能很好适应技术发展和创新。目前,以CCAR-23部修订为标志,有人驾驶航空器适航标准逐步向不囿于指标细节的方向转变。无人驾驶航空器适航标准制定在起步时,更应把握这一趋势,更加注重以通用化角度给出安全性要求,避免陷于技术细节。
不过,过于泛化的标准也存在难以证明符合性的不足。为解决这个问题,可以把部分技术细节作为一个专题,下沉到修订比较容易和快速的非规章形式的标准当中。同时,这类专题性标准往往与构型无关,可以支撑不同构型的无人驾驶航空器适航标准。
民用无人驾驶航空器适航标准框架
下图给出民用无人驾驶航空器适航标准框架的建议。
如图5所示,首先将无人驾驶航空器的适航标准按照基于风险、分级施策的原则,分为高、中、低三个递减等级;其次根据构型差异,将无人驾驶航空器的适航标准分为固定翼、直升机、多旋翼三个分组;形成无人驾驶航空器适航标准框架的矩阵层。
上述矩阵的每个单元格均对应一个特定构型和特定风险的组合,每个组合均对应一份无人驾驶航空器适航标准,也即矩阵的每个单元格对应一份适航标准。每份适航标准具有相对独立性,包含性能、飞行品质、结构强度、动力装置、机载设备、数据链路、控制站、使用限制和资料等章节,同时覆盖硬件和软件要求。当然,如果同一构型、不同风险等级的两个相邻的适航标准总体差异不大,也可以考虑将二者整合到一份标准中,只在具体条款里依照风险等级,区分出各自适用的适航要求。例如在同一个条款里,以诸如ⅰ、ⅱ或ⅲ的形式区分具体要求。
对于复合翼等复杂构型,可以从不同单元格选取适用标准的条款予以组合,并补充部分条款,形成适合该构型的无人驾驶航空器适航标准。由于具有模块化的特点,上述矩阵可以很好适应复杂构型无人驾驶航空器适航标准的需求。
另外,按照通用化和具体化相结合的原则,无人驾驶航空器适航标准框架矩阵内每个单元格代表一份通用适航标准,以适应技术发展创新。而与构型无关、具体化的专题性技术标准用来支撑和指导申请人表明对上述通用适航标准的符合过程,形成图5中矩阵层的基石。典型的无人驾驶航空器的专题性技术标准包括发动机、电动系统、飞行控制、数据链路、控制站等。这些技术通常不受无人驾驶航空器构型限制,同时有可能开发出独立的产品。这些独立产品给不同构型、不同品牌的无人驾驶航空器配套,相应的制造厂家也有可能产生单独取证的需求,这也增加了制定此类专题性技术标准的必要性。
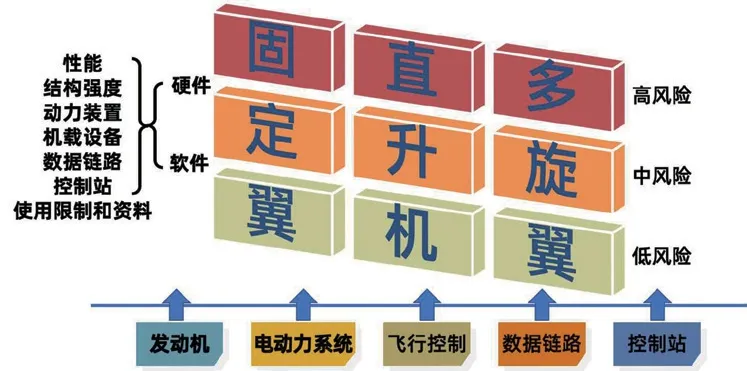
图5 2.0 版民用无人驾驶航空器适航标准框架。
综上所述,2.0版无人驾驶航空器适航标准框架包括两个层次,一是基于风险、分级施策、区分构型、通用化的矩阵式、模块化层次,二是专题性、具体性的基石化层次。两个层次紧密结合,形成完整的2.0版无人驾驶航空器适航标准框架。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
西北工业大学学报(2022年1期)2022-04-22
西华大学学报(自然科学版)(2022年2期)2022-03-17
科技信息·学术版(2021年1期)2021-12-17
汽车工程学报(2021年3期)2021-06-16
科学与财富(2021年33期)2021-05-10
航空维修与工程(2021年1期)2021-04-12
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
人民交通(2020年5期)2020-05-03
科学大众(中学)(2017年3期)2017-07-06