基于Arduino的力反馈型灵巧手系统设计
2020-12-01 00:52张英坤郝存明张效玮马艳东潘其旺
食品工业 2020年11期
张英坤 ,郝存明 ,张效玮,马艳东 *,潘其旺
1. 河北省科学院应用数学研究所(石家庄 050081);2. 河北省信息安全认证工程技术研究中心(石家庄 050081);3. 石家庄市发展和改革委员会(石家庄 050081);4. 中国电信集团石家庄分公司(石家庄 050081)
抓取操作是机器人在食品生产活动中必不可少的一类动作,通常是通过机器人的末端执行器来完成,实际应用中的机器人末端执行器多为专用夹持器,具有负载能力强、抓取稳定性好等优点,但其通用性较差[1]。由此,国内外诸多研究机构相继研制出各种结构的灵巧手[2-6],灵巧手虽然能够完成一些灵巧抓取和精细操作,但由于使用的传感器和驱动元件多,导致灵巧手结构复杂、控制难度大。针对该问题,提出设计一种基于Arduino控制器的力反馈型灵巧手系统。在系统设计时,不仅要保证系统的安全性和稳定性,还要保证灵巧手对目标物体的无损抓握。为了避免在抓握过程中因抓握力过大使得灵巧手对目标物体造成损害,采用了限定接触抓握力最大值的控制方式[7]。经试验验证表明,设计的灵巧手系统具有良好的力反馈功能,可实现灵巧手对目标物体的可靠抓握。
1 欠驱动灵巧手系统构成
欠驱动灵巧手系统的整体构成如图1所示,主要由灵巧手机械结构、电机驱动器、电机、FSR传感器、灵巧手控制器和人机交互系统组成,系统框图如图2所示。FSR传感器用于检测灵巧手与目标物体之间的相互作用力。电机驱动器驱动电机,用于产生驱动灵巧手进行抓握运动的力矩。灵巧手控制器通过串口与PC机的人机交互系统实现数据传输,一方面控制器接收人机交互系统发送的控制命令,经过解析控制电机驱动器动作;另一方面人机交互系统接收、显示并存储控制器发送的FSR传感器数据,并将其作为判断抓握操作是否完成的依据。

图1 欠驱动灵巧手系统
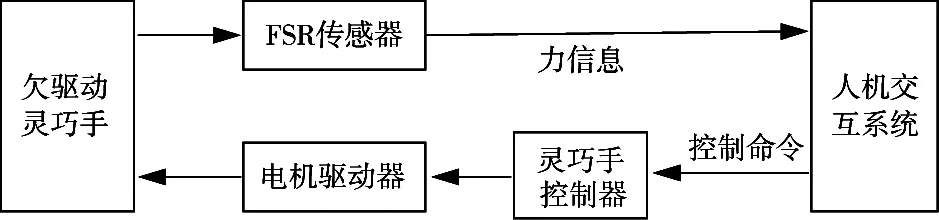
图2 欠驱动灵巧手系统框图
2 灵巧手机构设计
2.1 灵巧手整体结构设计
根据力的平衡原理,抓取物体时至少需要2个相对的力或力偶作用于物体上,即二指结构在理论上已经可以完成抓取任务[7]。因此,设计一种具有2根欠驱动手指的灵巧手,其结构如图3所示,主要由手指机构、驱动传感装置及基座3部分组成。手指机构包括左右对称分布的2根结构完全相同的模块化欠驱动手指,每根欠驱动手指均由一组驱动传感装置控制,实现手指机构的弯曲/伸展运动。驱动传感装置包括电机和FSR传感器。基座分为上下2层,上层基座用来固定电机和手指机构,下层基座用来安装灵巧手,如将灵巧手固定到机械臂等载体上。

图3 二指灵巧手结构
2.2 欠驱动手指结构设计
通过分析人手手指的生理学结构及其运动特点[8],设计如图4所示的欠驱动三指节手指机构,以实现平面内的弯曲/伸展运动。欠驱动手指主要包括近指节、中指节、远指节3个部分,近指节、中指节、远指节可分别绕近指节关节轴、中指节关节轴以及远指节关节轴转动,利用刚性连杆构成手指的传动系统,利用中指节拉簧和近指节拉簧2组弹性元件实现手指机构在抓握过程中的自适应变形。
欠驱动手指在抓握过程中的自适应包络运动过程如图5所示,手指和目标物体的初始位姿如图5(a)所示,此时,手指和目标物体不发生接触;在电机驱动力作用下,手指开始转动,与物体发生接触前,近指节拉簧和中指节拉簧不被拉长,3个指节保持初始位姿关系,直到近指节与物体发生接触,此时,近指节不能再继续运动,如图5(b)所示;手指的中指节和远指节在电机驱动力作用下继续运动,近指节拉簧被拉长,中指节拉簧保持不变,直到中指节与物体发生接触,此时,中指节不能再继续运动,如图5(c)所示;手指的远指节在电机驱动力作用下继续运动,近指节拉簧继续被拉长,中指节拉簧也被拉长,直到远指节与物体发生接触,此时,远指节不能再继续运动,如图5(d)所示。经历了如图5所示的运动过程,手指最终实现对目标物体的自适应包络抓握。
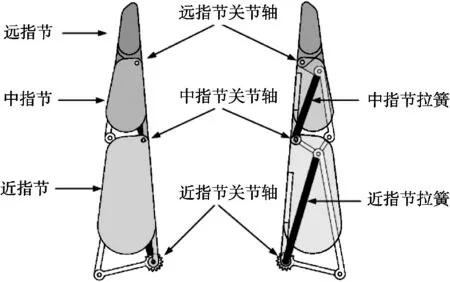
图4 欠驱动手指结构

图5 欠驱动手指自适应包络运动过程
3 系统硬件设计
3.1 系统硬件电路总体设计
灵巧手系统的硬件电路采用模块化设计,包括主控制器模块、传感器信息采集模块、驱动控制模块、通信模块和电源管理模块,如图6所示。其中,主控制器模块采用以AVR单片机ATmega 328P作为内核的Arduino UNO开发板[9],具有14个数字输入输出IO,6个模拟输入IO,以及32 kb的Flash存储空间,能够满足灵巧手控制系统的需求。USB串口负责Arduino控制器与上位机人机交互系统之间的通信。
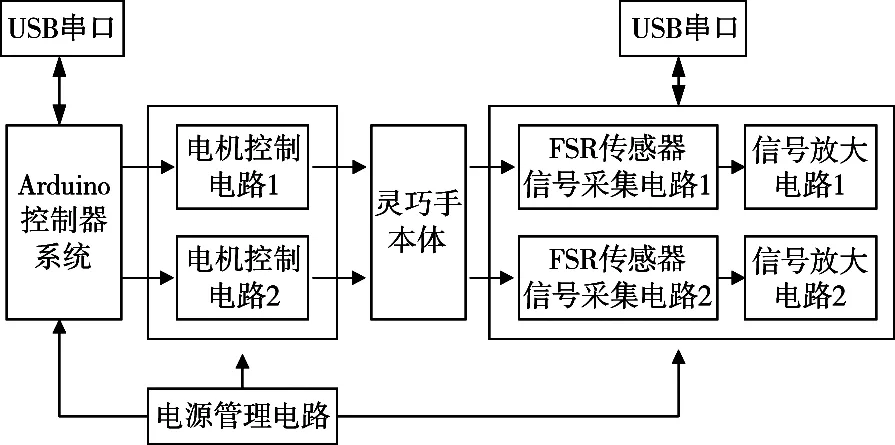
图6 系统硬件电路总体框图
3.2 FSR传感器信号采集及信号放大电路
为获取灵巧手与目标物体之间的接触力信息,系统采用FSR压阻式力敏传感器对接触力进行监测,其参数如表1所示,其性能能够满足系统的精度要求。

表1 FSR传感器参数
由于FSR传感器输出的是电阻信号,因此需要搭建电阻转电压电路,通过在其输出端串联一个10 kΩ电阻,使其输出信号变为0~5 V的电压信号[10]。同时,利用LM358放大器构成信号放大电路,其输入为FSR传感器的输出电压。FSR传感器信号采集及信号放大的集成电路如图7所示。
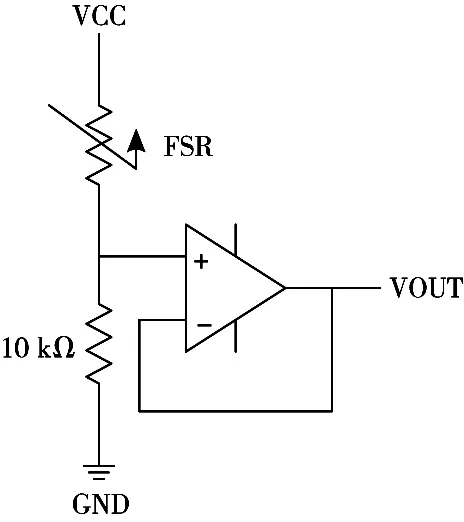
图7 FSR传感器信号采集及信号放大电路
3.3 电机控制电路
电机控制电路包括两路直流电机和直流电机驱动电路。受灵巧手的尺寸限制,直流电机需要满足体积小、输出力矩大、精确度高及响应速度快等条件。根据上述要求,系统选用的是N20直流减速电机,电机参数如表2所示,其自带减速箱,且体积小,噪音低,精度高,输出力矩能够满足系统需求。直流电机驱动电路采用L298N作为主驱动芯片[11],具有驱动能力强、发热低、抗干扰性强等优点。L298N内含2个H桥的全桥式驱动器,可以直接驱动两路直流电机,还可以方便地控制直流电机的速度和方向。

表2 N20直流减速电机参数
4 系统软件设计
灵巧手系统的软件设计包括下位机程序设计和上位机人机交互系统设计2部分。下位机程序设计包括系统初始化、解析上位机指令、数据采集、模数转换、数据传输、电机驱动控制等。灵巧手控制器上电并完成系统参数的初始化设置,然后,接收并解析上位机指令以判断是否要求开始抓取操作,确定接收到开始抓取指令后,控制器驱动电机运动,同时采集FSR传感器数据并完成模数转换,将数据通过串口发送到上位机人机交互系统。人机交互系统接收FSR传感器数据,判断当前获取的测量接触力是否达到设定的期望抓握力,若达到最大抓握力则向下位机发送指令控制电机停止运动,灵巧手即停止动作,否则在抓握操作尚未结束且没有按下停止按钮时,系统进入下一步抓取动作的循环。上位机人机交互系统采用LabVIEW图形化编程语言[12]在PC机上编写,通过串口与下位机灵巧手控制器连接,接收、保存并在人机交互界面上实时显示接触力信息。
5 试验验证与分析
为了验证所设计的控制系统是否能够实现灵巧手对目标物体的可靠抓握,在完成系统调试后进行试验验证。试验的具体流程为:
a)给灵巧手设定期望抓握力,即最大接触力;b)以恒定的转速驱动电机控制灵巧手运动;c)在灵巧手抓握过程中,利用FSR传感器实时采集手指接触力信息;
d)判断FSR传感器测量的手指接触力是否达到设定的期望抓握力,若是达到,则停止电机工作,否则继续抓取动作的循环。
控制灵巧手抓握一个塑料瓶,FSR传感器贴附在远指节内触面,设定灵巧手对该塑料瓶的期望抓握力为1.65 N,抓握运动过程如图9所示,灵巧手抓握塑料瓶的接触力数据如图10所示。从图9可以看出,灵巧手与塑料瓶发生接触前,灵巧手的3个指节保持原来的位姿关系;灵巧手与塑料瓶发生接触,灵巧手的3个指节发生自适应变形,直至完成对塑料瓶的包络抓握。从图10的接触力曲线可以看出,手指接触力随着自适应包络运动的进行而逐渐增大,手指接触力达到设定的期望抓握力时,灵巧手控制电机停止工作,抓握操作结束。
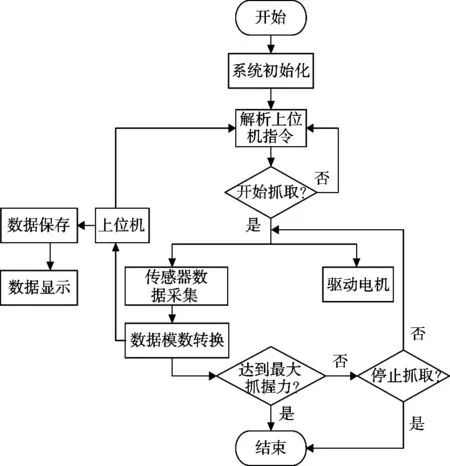
图8 系统软件程序流程图

图10 抓握力试验数据
6 结论
基于Arduino控制器设计一套具有力反馈的灵巧手系统,对系统整体构成、欠驱动灵巧手结构设计、硬件系统设计和软件系统设计进行详细描述,并通过试验测试系统性能。系统利用FSR压力传感器获取灵巧手的抓握力信息,以此实现力反馈,通过对直流电机的控制实现对灵巧手抓握运动的控制,通过串口实现下位机控制器与PC机人机交互系统之间的数据传输,将灵巧手的抓握力数据进行图像化显示。系统采用Arduino控制器实现灵巧手的控制,具有结构简洁、控制容易的特点,试验结果表明系统能够实现灵巧手对目标物体的稳定抓握,对促进灵巧手在食品行业的进一步推广和应用具有重要意义。
猜你喜欢
铁道车辆(2022年5期)2022-10-31
实用手外科杂志(2022年2期)2022-08-31
网络安全技术与应用(2022年5期)2022-07-26
理化检验(物理分册)(2021年10期)2021-10-27
小聪仔(婴儿版)(2020年12期)2021-01-26
陕西理工大学学报(自然科学版)(2018年5期)2018-11-06
汽车零部件(2017年8期)2017-12-18
中国设备工程(2017年11期)2017-06-29
创造(2016年5期)2016-02-01
少年科学(2015年8期)2015-08-13