
基于ROS操作系统的机器人路径规划仿真
2020-12-14 04:08刘庆邓杰铭张棚
科学与财富 2020年30期
刘庆 邓杰铭 张棚
摘 要:当今社会,机器人和无人驾驶技术的快速发展,机器人已经应用于各個行业中,路径规划作为该领域的研究问题之一,具有重要的理论研究意义和实践应用价值。本文分析了ROS操作系统的构成,基于ROS操作系统上分析了路径规划的分类以及不同的路径规划算法,实现在不同场景设定初始节点和目标节点,运用A*算法以及动态窗口算法,对移动机器人的运动轨迹进行路径规划仿真,根据两种路径规划算法的实现过程,得到仿真实验结果。
关键词:ROS 路径规划 A*算法 动态窗口算法
1引言
目前,工信和信息化部、国家发展改革委、财政部等三部委联合印发了《机器人产业发展规划(2016-2020年)》,为我国机器人产业发展描绘了清晰的蓝图,构建智能制造为根本特征的新型移动机器人,相比于传统移动机器人只能在事先设定好的程序和熟悉的环境中进行机械性动作,新型移动机器人具有自主规划路径、自主导航、自主避障的智能机器人。
移动机器人在各行业中的应用环境的不同,面临不同的运动轨迹和突发问题,这急需提高移动机器人的应用性能。未来,无人驾驶汽车、巡检机器人等设备的发展都需要使用机器人的路径规划与自主导航功能,因此,移动机器人的路径规划能力至关重要[1]。为实现移动机器人的路径规划,采用基于ROS操作系统的路径规划算法制定最优路径。
2 ROS操作系统简介
ROS是一个适用于机器人的开源的元操作系统,它提供了操作系统应有的服务,主要目标是为机器人研究和开发提供代码复用的支持。
ROS是将原本松散的零部件耦合在一起,这些零部件称为节点,每个节点独立运行,与其他节点相互通信。ROS提供了大量的功能包,开发者可以直接调用包含所需节点的包,ROS支持多语言开发,不同的节点可以使用不同的语言开发,这种具有独立性和开源型的模块化开发设计提高了共享性和开发效率[2]。ROS是通讯机制、工具软件包、机器人高层技能以及机器人生态系统的集合。
3移动机器人仿真设计
3.1仿真系统架构
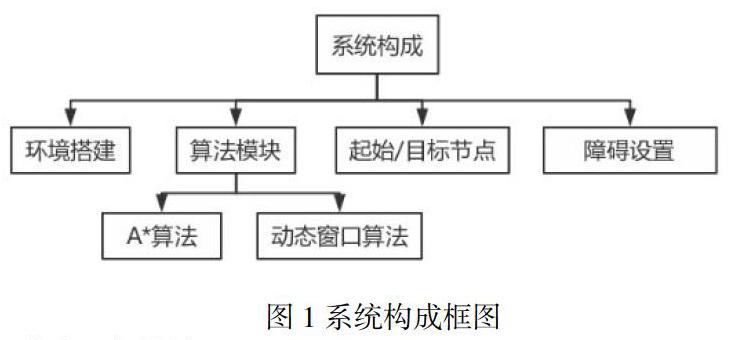
采用模块化设计可提高系统利用率,将仿真系统分为环境搭建、算法模块、起始/目标节点、障碍设置四大模块,系统构成如图1所示。
3.2仿真目标设计
(1)搭建界面友好的仿真环境,将界面设计的美观且人性化、展现的与真实场景相似。
(2)界面可以在移动机器人能到达的场景范围内变换场景设施、障碍设置。
(3)可随意设置移动机器人的起始节点位置以及目标节点位置。
(4)根据不同的路径规划算法使机器人运动,比较不同算法之间的优缺点。
3.3系统仿真平台
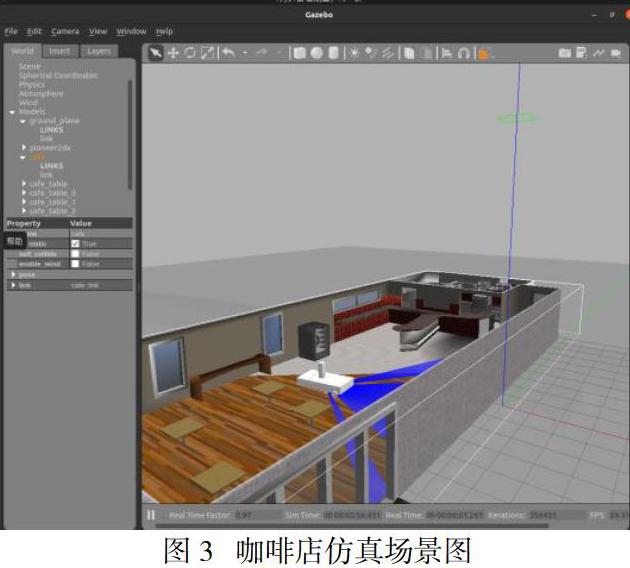
在Ubuntu20.0环境下搭建的ROS操作系统为移动机器人提供了一系列的控制器接口、传感器接口、工具箱等,所提供的功能包提高机器人开发效率。使用Gazebo作为系统仿真软件,需要在Gazebo中配置移动机器人模型、创建不同仿真环境。
4路径规划算法的实现
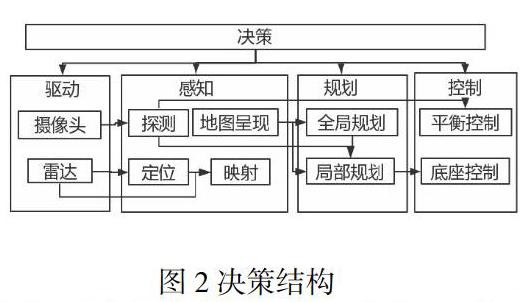
路径规划是移动机器人运动的最基本环节,主要包括感知、决策、控制,一般的路径规划指的是决策部分,如图4所示。在有障碍物的运动环境中,找到一条从起点到终点的最优运动路径,机器人在运动过程中能无碰撞、安全的绕过所有障碍物,机器人需要对静态和动态环境做出综合判断,并规划出最优路径。
在仿真环境中采用A*算法、动态窗口算法[3]对移动机器人的运动路径模拟,实现移动机器人的路径规划仿真。
首先在Gazebo软件中模拟真实场景,给定移动机器人的初始节点和目标节点,A*算法在地图中搜索节点信息[4],根据下一节点到目标节点的距离做出估价,得到目前节点的最有路径的可能性,快速搜索出可能性最大的路径。
相比于A*算法的搜索启发式路径规划,动态窗口算法是对移动机器人的行驶轨迹、模型速度采样,由此得到不同运动速度,根据每条轨迹的不同角度差、最短距离以及当前速度分别对每条路径进行评价[5]。
5实验仿真及结论
本实验仿真系统在虚拟机上运行,使用Linux操作系统,采用Gazebo作为开发平台,移动机器人的路径规划验证结果都在仿真平台上实现。
使用A*算法和动态窗口算法分别实现移动机器人的路径规划,并且机器人在不同的场景使用不同的算法,如图3所示。
由仿真实验可以得到在不同场景中使用不同算法,移动机器人的运动轨迹不同,根据初始节点与目标节点的设定,机器人能够成功避开设定障碍,找到最优路径,实现达到目标位置。结果表明,A*算法适用于静态搜索路径,环境一旦变化,则需重新开始规划节点到目标节点路径,相对于A*算法,动态窗口算法适用于局部路径规划,将全局路径进行局部路径规划,直到到达目标点。
6结语
(1)本文主要对基于ROS操作系统的移动机器人的路径规划的场景仿真,采用不同路径规划算法,找到机器人运动的最优路径,得到安全、稳定的避障路径,完成动态实验。
(2)仿真A*算法与动态窗口算法的路径规划。通过仿真可以看出两种算法的区别,并验证了两种算法的适用情况以及优缺点,完成移动机器人在不同场景、不同算法的路径规划。
参考文献:
[1]李贺喜,李富强,牛童立,李康,杜边境.基于ROS系统移动机器人SLAM算法的研究与实现[J].技术与市场,2020,27(07):97+99.
[2]吴梦珂,任工昌,刘朋.基于ROS的移动机器人多目标点导航的实现[J].电子技术,2018,47(07):26-29+22.
[3]孙章军,田海晏,邓双成,孙晨.移动机器人路径规划仿真平台设计[J].北京石油化工学院学报,2006(03):16-19.
[4]霍凤财,迟金,黄梓健,任璐,孙勤江,陈建玲.移动机器人路径规划算法综述[J].吉林大学学报(信息科学版),2018,36(06):639-647.
[5]何壮壮,丁德锐.基于D-star和DWA的改进机器人导航方法[J].电子测量技术,2019,42(12):122-128.
作者简介:
刘庆 ,女 , 重庆邮电大学 工业物联网与网络化控制教育部重点实验室 在读研究生 研究方向:物联网技术与应用
基金:重庆市教委雏鹰计划第九期研究项目“基于Hadoop智能家居管理软件的研究与设计”(编号:CY200609)
猜你喜欢
成都信息工程大学学报(2019年4期)2019-11-04
阅读与作文(英语初中版)(2019年8期)2019-08-27
小学生学习指导(低年级)(2018年11期)2018-12-03
中学生数理化·高一版(2017年9期)2017-12-19
西安工程大学学报(2016年6期)2017-01-15
中国新通信(2016年22期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
