
高机动水下仿生航行器研究现状
2021-01-19 08:10喻俊志杜晟吴正兴
舰船科学技术 2020年12期
喻俊志,杜晟,吴正兴
(1. 北京大学工学院,北京 100871;2. 中国科学院自动化研究所 复杂系统管理与控制国家重点实验室,北京 100190)
0 引 言
自主水下航行器(Autonomous Underwater Vehicle,AUV)是海洋科技中的重要组成部分,在军事、民事上均有广泛应用。传统AUV 采用螺旋桨进行推进,具有安装方便、控制简单,易于更换维护等优点。但其效率低、噪声大、转向机动性差以及易出故障等实际问题也不容忽视。与此同时,水下生物经过数亿年的演化,进化出各种适应于水中运动的能力。通过模仿自然界水下生物的推进机理,能有效提高水下航行器的效率和机动性,以及减少噪声和对海洋生物造成伤害等问题。
最常见的水下生物是鱼类,人类已知的约有2 万余种。鱼类和鲸豚类具有流线型外形,且体表能分泌粘液,能极大降低水中阻力;强有力的肌肉带给鱼类瞬间启动、爆发式加速和快速转向的能力,而鱼鳔和鳍面的巧妙配合,能让鱼类实现大角度的俯仰运动以及悬停。此外,乌贼、章鱼以及扇贝等其他水生生物利用射流实现推进和转向,在自身加速前进的同时可阻碍捕食者。这些特性给水下航行器的改进和研发提供了新的研究方向和思路。
1 水下仿生航行器的分类
从推进力的来源来分[1-2],可以将水下仿生航行器分成两大类:一类仿照章鱼和扇贝等利用向后方喷出液体进行推进;一类模仿鱼类和鲸豚类,利用身体和鳍面运动时产生的涡流进行推进。其中鱼类按其推进主动力的来源可分为奇鳍/对鳍(Medial and Paired Fin,MPF)模式和身体/尾鳍(Body and Caudal Fin,BCF)模式。其中,鲸豚类的游动方式也归属于BCF模式。而进一步细分,BCF 模式因其身体段参与生成推进力的比例,又可分为鳗鲡式(Anguilliform)、亚鲹科模式(Subcarangiform)、鲹科模式(Carangiform)和鲔行模式(Thunniform)4 种。需要注意的是,这里的分类只针对于鱼类的游动模式,而非鱼类本身。同类鱼可能既能利用BCF 模式实现高速推进,又能利用MPF 模式实现机动转向和保持稳定。
乌贼、水母等动物可利用身体的特殊构造,储存水然后向后喷出,获得前进动力;扇贝通过拍动甲壳,可使水流从前方流入,后方小孔喷出,获得动力。对于生物体而言,每次运动后都需要一定时间进行恢复,运动效率不高。相比较而言,鱼类利用身体变形时产生的涡流进行推进,其运动效率较高,有效功率可达95%以上。以蝠鲼为代表的MPF 模式,其运动平稳,转向灵活;而以金枪鱼为代表的BCF 模式,兼具了爆发性加速和长时间远距离巡游的优点[3-4]。
2 高机动水下仿生航行器平台介绍
用飞机机动性类似的概念可以定义水下仿生航行器的机动性,即水下仿生航行器的加速性能、转向速度以及上浮下潜的速度。考虑到水下航行器在水中运动时所受阻力要远大于空气阻力,阻力大小与水中运动的速度平方成反比关系,因此在一定程度上水下航行器所能达到的最大速度也可替代加速度,作为机动性的考察指标。此外,对于水下仿生航行器而言,其最大优势在于转向灵活,亦即转向半径较小。而从实际角度出发,转向速度较快的航行器通常转向半径较小。因此在衡量水下航行器的机动性时,转向半径也可作为一个评价指标。
因水下仿生航行器的大小尺寸不一,采用绝对值进行评估有失偏颇。通常的做法是以体长/秒(Body length/second,BL/s)作为速度的衡量单位,而转向半径以单位体长作为衡量单位。下面以速度、转向半径和转向速度等指标为主线,介绍近些年来具有较高机动性的水下仿生航行器平台。
2.1 喷射式水下仿生航行器
对生物体而言,喷射式的推进往往需要特殊的身体结构实现,每次推进的间隔时间较长。而对机械仿生来说,喷射式的推进可采用简单机构实现。Wang等[5]设计了一种利用射流进行推进的仿生扇贝,如图1所示。模仿扇贝的帘状肌肉,设计了可被动弯曲的人工帘状肌肉,以起到单向阀的作用。仿生扇贝的外壳张开时,水流入贝壳内部;外壳闭拢时,人工帘状肌肉保证水流从后方小孔射出,推动仿生扇贝前进。

图 1 仿生扇贝结构图Fig. 1Structure of the scallop robot
仿生扇贝外壳的开闭由电机带动旋转臂实现。外壳由弹簧连接,当旋转臂垂直于中心面时,外壳张开;而旋转臂平行于中心面时,外壳在弹簧作用下闭合。电机转动一圈外壳开闭2 次。通过调整开合频率、幅度以及不同尺寸的外壳和射流孔等关键因素,仿生扇贝可实现原地转向,翻滚等动作。最终通过优化参数组合,仿生扇贝的半径约为0.15 m,最高平均速度为3.4 BL/s,最大瞬时速度为4.65 BL/s。
Wang 等[6]设计了一种利用记忆合金(Shape Memory Alloy,SMA)驱动的仿乌贼水下航行器,可通过鳍面波动和喷嘴向后喷水的方式进行前进,结构如图2 所示。利用射流推进的最大瞬间速度为0.6 m,但难以实现连续推进。
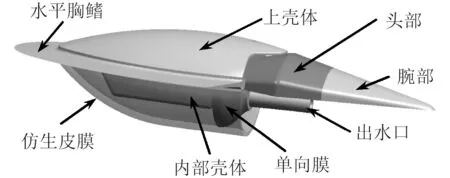
图 2 仿生乌贼结构图Fig. 2Structure of the cuttlefish robot
Liao 等[7]设计了一种双尾鳍的机器鱼,如图3 所示。通过改变2 个尾鳍之间的距离,可使得尾鳍摆动产生的涡流之间相互影响,将其转变成射流,以此来推进机器鱼。当2 个尾鳍反向摆动时,可有效减少鱼体的晃动,降低前进阻力。报道的最高游速为0.35 m/s(折合2.5 BL/s)。
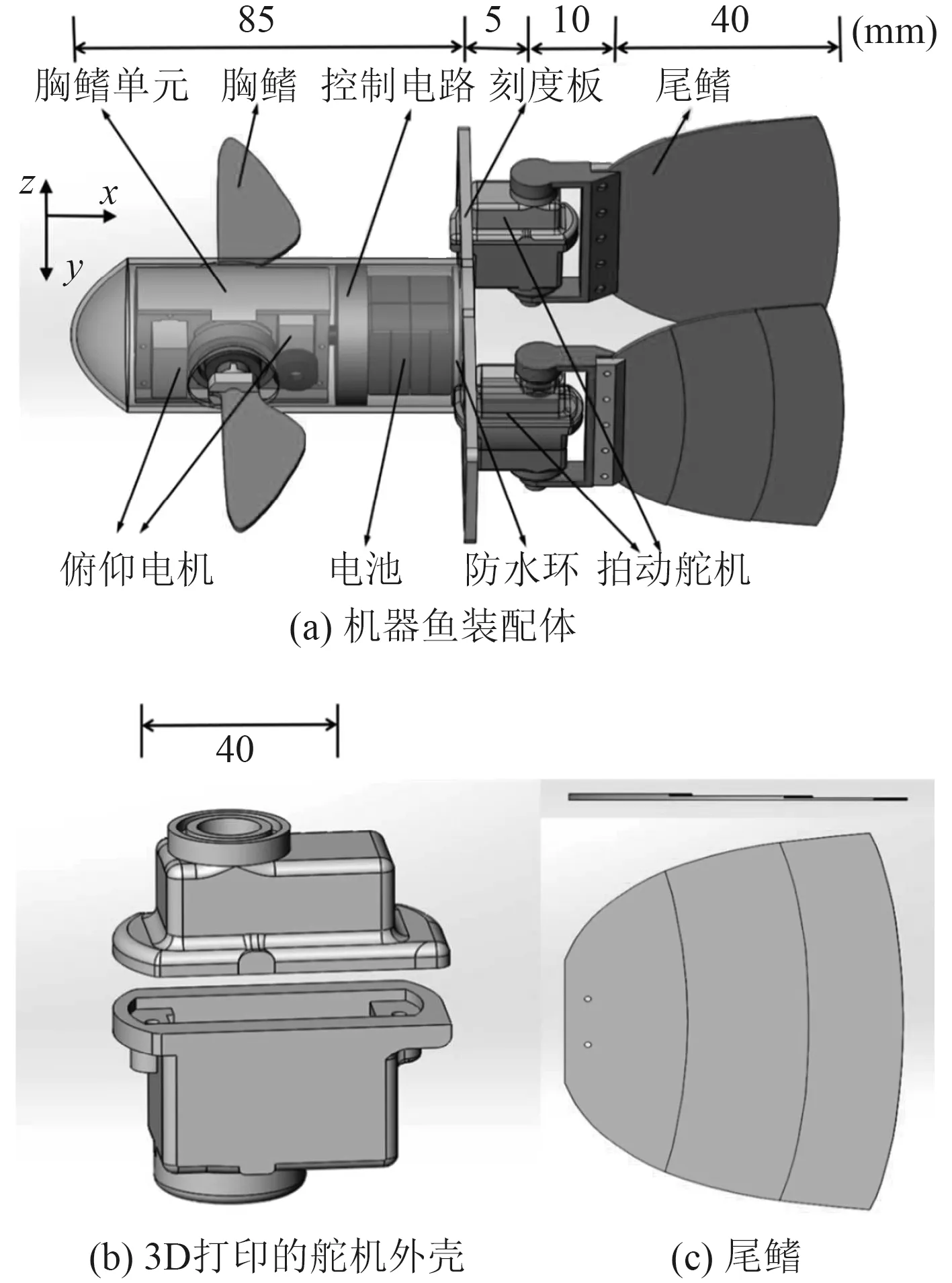
图 3 双尾鳍机器鱼Fig. 3Schematic of the dual caudal-fin robotic fish
2.2 摆动式/波动式水下仿生航行器
仿效鱼类和鲸豚类推进方式设计的水下仿生航行器较多,其研究方向和设计理念不尽相同。部分平台是为研究鱼类游动机理而设计,如MIT 的Robotuna,主要目的是研究尾鳍摆动时流场的变化情况[8],采用鱼体固定在支架上的方式进行研究。部分平台是为研究新的传感器而设计,如Zheng 等设计的仿箱鲀鱼系统[9],主要侧重于侧线的应用。本文列举部分具有较高机动性能的代表性水下仿生航行器平台。
2.2.1 MPF 模式推进平台
Chew 等[10]以蝠鲼为原型,设计制造了一种仿生蝠鲼(见图4),体长0.28 m,实现了0.45 m/s(折合1.783 BL/s)的最大瞬时直游速度。
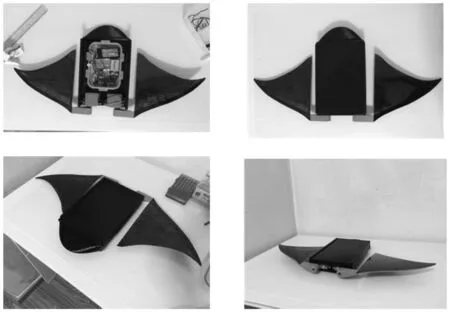
图 4 仿生蝠鲼原型样机Fig. 4Photographs of robot manta ray prototype
如图5 所示,Gao 等[11]设计的蝠鲼体长0.5 m,翼展0.6 m,重量约为3.4 kg。胸鳍设计为一个自由度,由17 W 的直流电机驱动,实现了0.7 m/s(折合1.4 BL/s)的最大直游速度。
2.2.2 BCF 模式推进平台
从20 世纪90 年代开始研制水下仿生航行器样机以来,BCF 模式推进就受到广泛关注。BCF 模式推进的特点在于结构相对简单,容易实现,且通过设计其机械结构,能实现远超其他推进模式的性能指标。其动力来源也十分广泛,可采用气动、液压、人工肌肉等方式进行驱动。然而就目前研究成果而言,以电机作为动力来源仍是首选。
1)鳗鲡式推进
Stefanini 等[12]以七鳃鳗为原型,开发了一种长0.99 m,具有21 kn 的仿生鳗鱼,以一种仿肌肉的电磁驱动来改变关节角,如图6 所示。通过中枢模式发生器(Central Pattern Generator Networks,CPGs)对关节角进行控制,最终实现了0.7 BL/s 的最高游速。而得益于多节结构的设计,仿生鳗鱼的转向半径最小可至0.075 m(折合0.076 BL)。

图 5 仿生蝠鲼原型样机Fig. 5Prototype of robotic manta ray

图 6 LAMPETRA 机器鱼示意图Fig. 6Schematic of LAMPETRA robot
2)亚鲹科式推进
Zhong 等[13]构造了一种线牵驱动的机器鱼(见图7)。其后半部分身体由多个转动关节连接,且具有一定柔性和弹性,当内置于头部壳体的舵机带动穿过各身体段的钢丝绳运动时,其尾部也随之摆动。通过舵机旋转的角度和频率可控制机器鱼的游动姿态。机器鱼总体尺寸为0.31 m×0.16 m×0.075 m,重0.5 kg,最终实现了0.665 m/s(折合2.15 BL/s)的最大直游速度和63°/s 的转向速度。

图 7 线牵驱动机器鱼示意图Fig. 7Schematic of wire-driven robotic fish
3)鲹科式推进
Clapham 和Hu 通过巧妙设计iSplash-II 的结构[14],实现了鲹科式推进直游速度方面的突破。如图8 所示,iSplash-II 共有4 个关节,前3 个关节的关节角度由电机所决定,第4 个关节为被动关节。总体尺寸为0.32 m×0.048 m×0.112 m,总重0.835 kg。通过一个峰值功率为120 W 的电机以20 Hz 驱动尾鳍,最终实现了3.7 m/s(折合11.6 BL/s)的直游速度。然而由于结构设计的限制,iSplash-II 并不能实现转向。
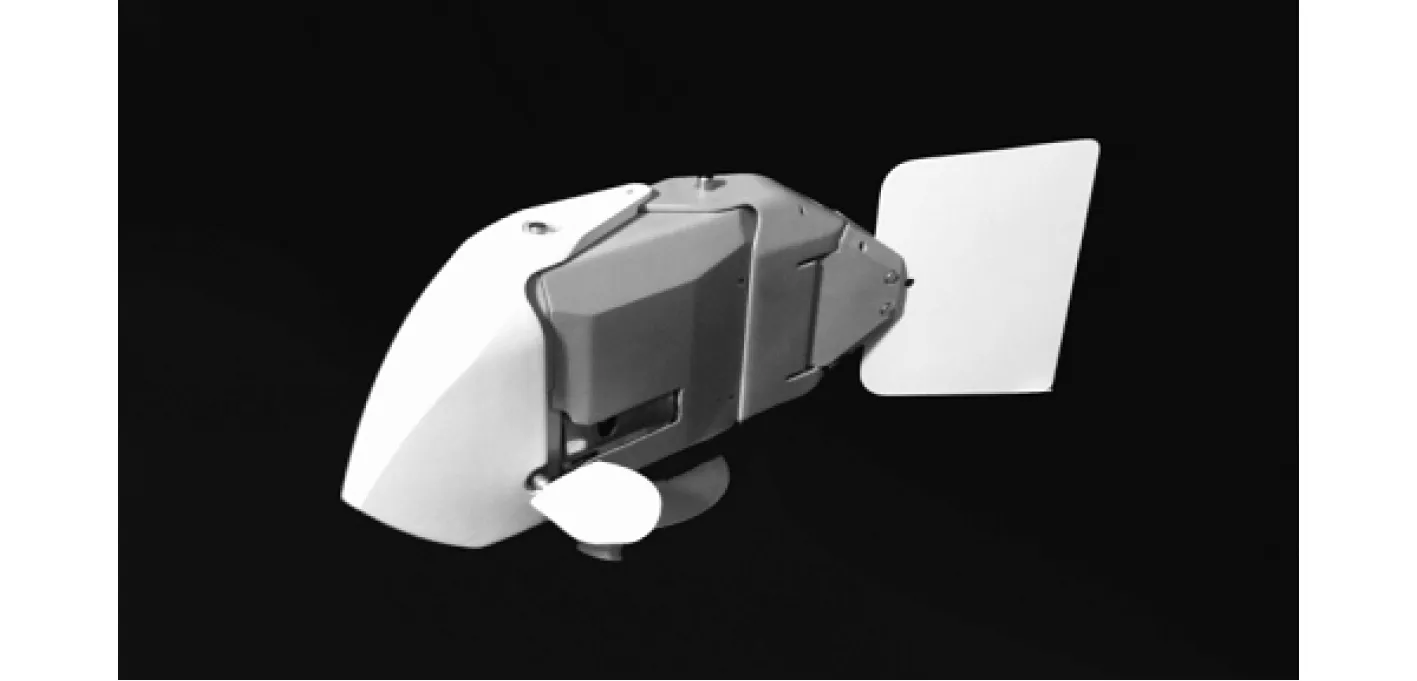
图 8 iSplash-II 示意图Fig. 8Schematic of iSplash-II
Su 等[15]为了测试提出的动态轨迹法控制下的C 形转向所使用的2 种四关节机器鱼,如图9 所示。大型机器鱼的尺寸为0.586 m×0.08 m×0.15 m,重3.24 kg,而小型机器鱼的尺寸为0.495 m×0.05 m×0.08 m,重1.29 kg。实验结果表明,大型机器鱼的峰值转向速度为200°/s,平均最大转向速度为128°/s。小型机器鱼的峰值转向速度为670°/s,平均转向速度为213°/s。2 种机器鱼的转向半径均在0.3 BL 之内。
4)鲔行式推进
Zhu 等[16]以黄鳍金枪鱼为原型,设计了一种单电机驱动的仿生机器鱼Tunabot,如图10 所示。Tunabot 的尺寸为0.255 3 m×0.049 2 m×0.067 8 m,重0.306 kg。实验结果表明,在电机转速达到最高值15 Hz 时,Tunabot 可在超过1.1 m/s(折合4.0 BL/s)的来流中保持位置不变。由于Tunabot 的体型限制,其仅具有直游能力,而不能实现主动转向和俯仰运动。
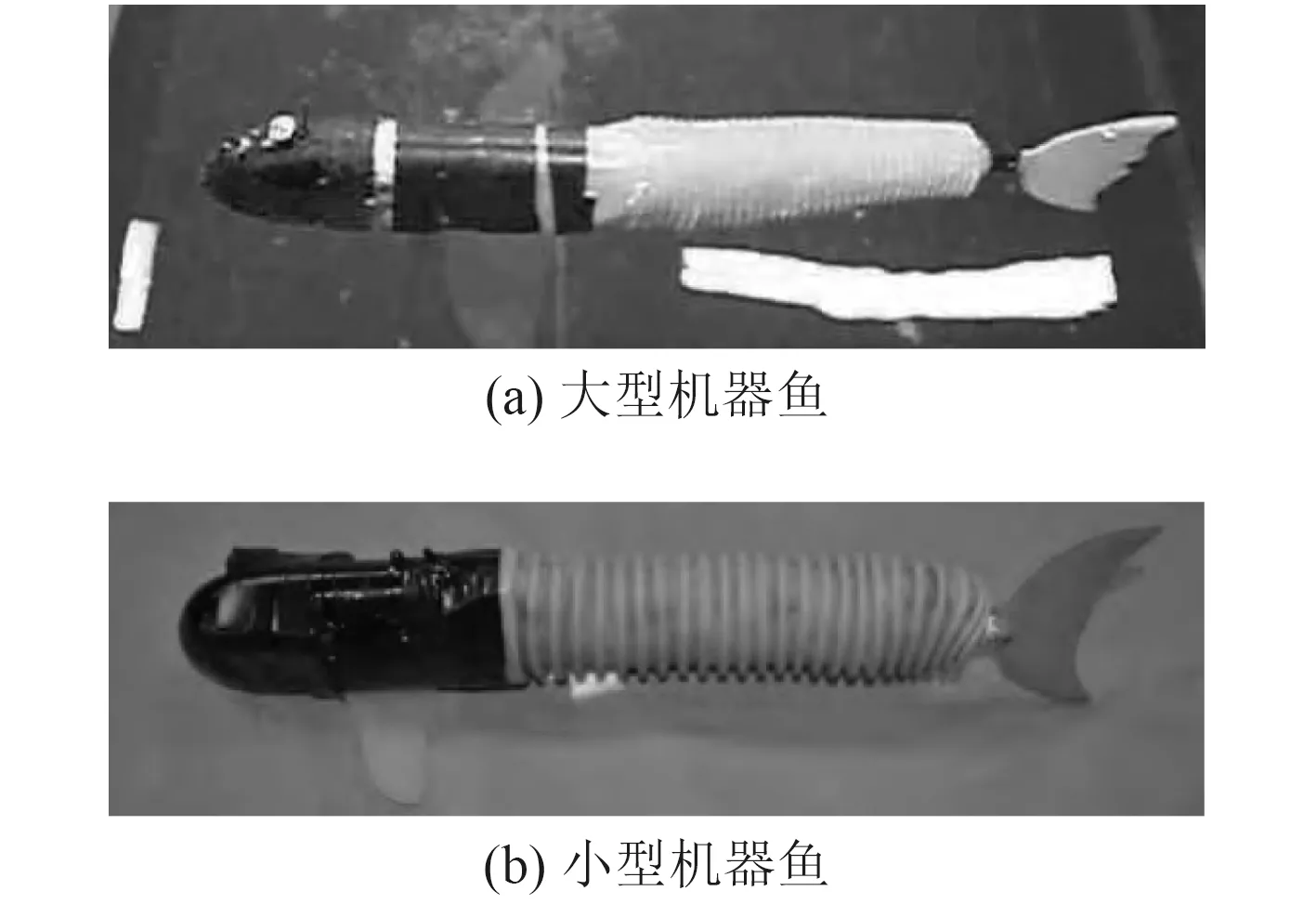
图 9 用于C 形转向的2 种四关节机器鱼Fig. 9Two four-joint robotic prototypes applied to C-start experiments
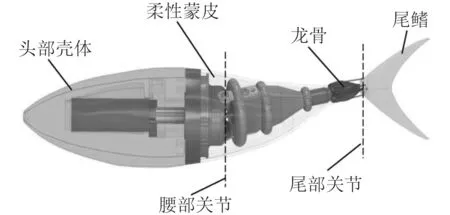
图 10 Tunabot 示意图Fig. 10Schematic of Tunabot
Du 等[17-18]为解决水下仿生平台的直游速度和转向性能之间存在矛盾的问题,提出一种新型的两关节驱动方法并应用于仿生金枪鱼之上。实验结果表明,设计的结构能使速度和转向性能达到一个较好的平衡点。如图11 所示,仿生金枪鱼平台的尺寸为0.46 m×0.1 m×0.13 m,重1.8 kg,最大瞬时速度为0.76 m/s(折合1.65 BL/s),最小转向半径为0.35 BL。
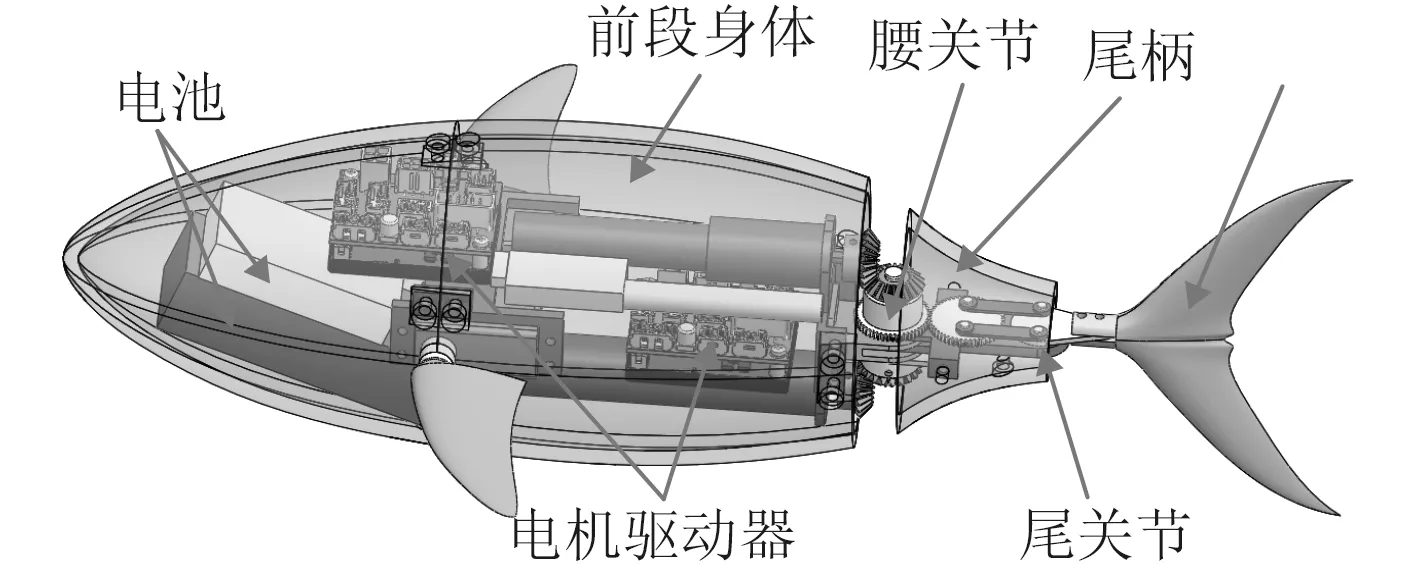
图 11 仿生金枪鱼示意图Fig. 11Schematic of Tuna-like robot
Yu 等[19]设计了一种高机动型的海豚用于重复跃水的运动控制研究,如图12 所示。跃水海豚的尺寸为0.72 m×0.12 m×0.13 m,重4.7 kg,最高平均速度为1.93±0.05 m/s(折合2.68±0.06 BL/s),最大瞬时速度为2.11 m/s(折合2.93 BL/s)。
3 分析与讨论
如表1 所示,通过上述研究成果的对比可以看出,BCF 模式推进的水下仿生航行器通过优化设计其机械结构和控制算法,可实现远超其他平台的性能指标。如Su 等[15]设计的四关节机器鱼,能实现670°/s 的转向速度,虽然较之生物界中射水鱼的峰值转向速度高达4 500°/s 相差甚远[20],但此项记录在水下航行器的相关研究中尚属首次。如最快的iSplash-II 最快游速可达3.7 m/s(折合11.6 BL/s),甚至超过了一般鱼类爆发时(约10 BL/s)的速度[14]。但BCF 模式最大问题在于速度和转向能力难以兼得[18]。一般而言,单电机驱动的航行器往往能在速度方面有较好的表现,而在转向性能方面有所不足;而多电机驱动的航行器往往在转向性能方面比较突出,对应的则是速度方面表现较弱。
相对于BCF 模式,采用喷射模式的仿扇贝型航行器能同时在速度和转向性能上均有较佳的表现。然而仿扇贝型航行器也存在一些问题,例如难以实现俯仰运动,且在野外环境中可能会吸进杂物导致出水口阻塞从而搁浅等。
MPF 推进模式一般具有较强的俯仰能力和转向能力,且直游运动稳定性较好,适于搭载载荷或作业工具以完成水下作业。此外,MPF 推进模式还可跟重心调整的机构配合,切换成滑翔模式,以实现超长距离的运动。
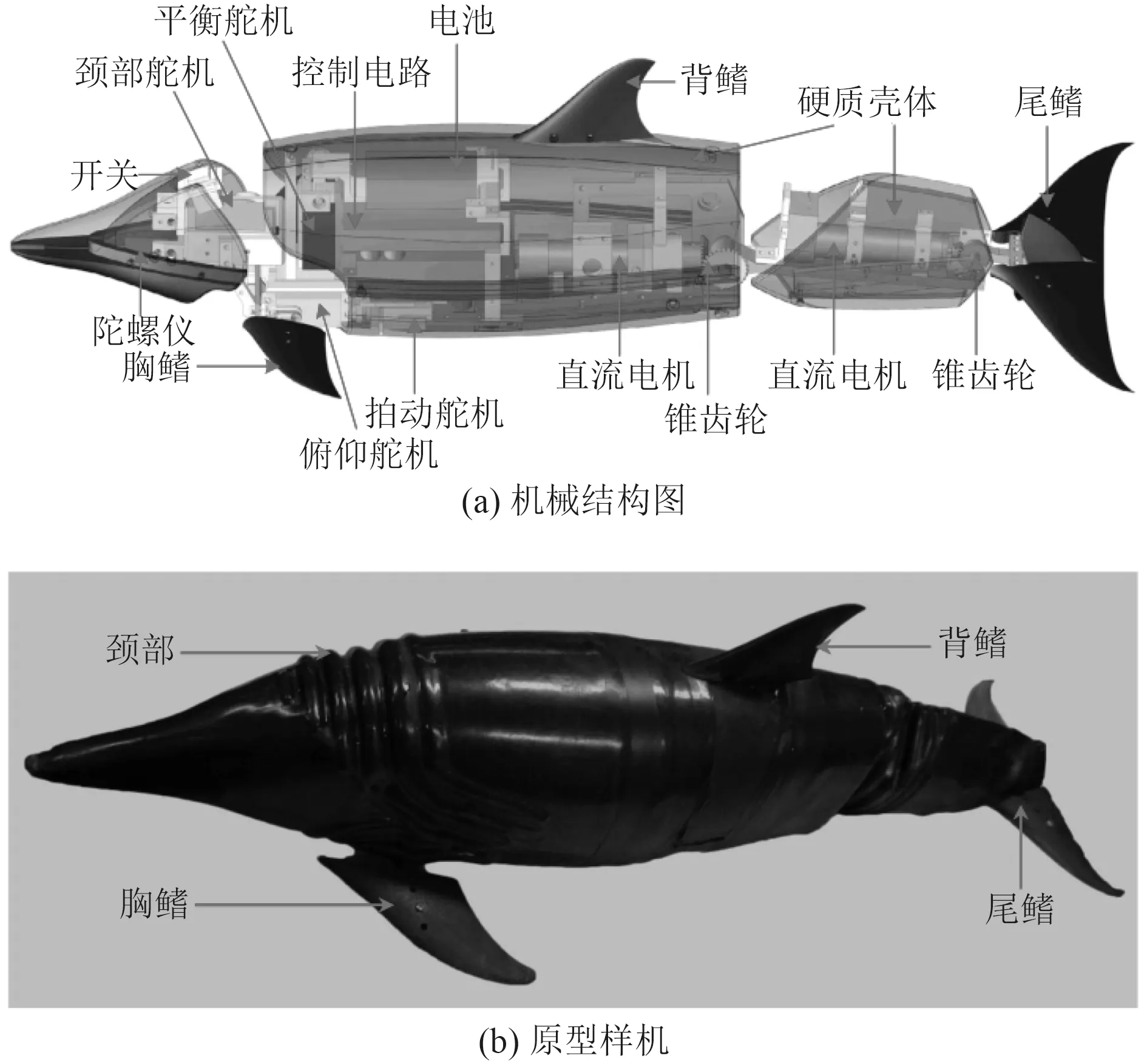
图 12 跃水海豚Fig. 12Leaping robotic fish
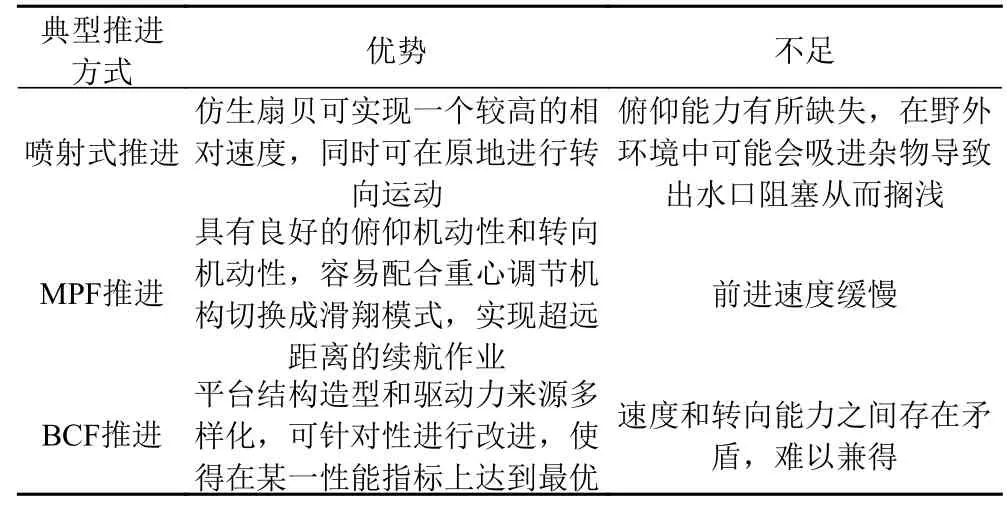
表 1 不同推进方式平台性能特点对比Tab. 1Comparison of typical parameters of caudal fin-like propulsion AUV
4 结 语
本文以水生生物的推进模式为主线,对水下仿生航行器的研究成果进行分类汇总。以高机动的性能指标为标准,筛选出各个推进模式中具有代表性的水下仿生航行器平台。通过对比分析可以得知,各种推进方式均有其各自的优缺点,在实际应用中要注意因地制宜、按需搭配。
在军事领域,可考虑用MPF 模式设计海上瞭望平台,一方面可通过切换成滑翔模式进行超长距离的布防,另一方面也可在必要时候利用MPF 模式突出的俯仰运动能力潜入水底,以避开可能受到的打击。而BCF 模式提供了多样化进攻和侦察的手段。如可设计仿蛇型水下航行器,通过狭窄区域以实现秘密探查,或搭载自爆系统实现定点爆破;可设计以假乱真的航行器混入鱼群中进行实地侦察;BCF 推进的快速型水下航行器的研究成果,更可直接移植于鱼雷之上,用于提高鱼雷的速度,实现精准打击。而喷射模式可作为辅助动力系统,一方面可用于自身的突然提速,以便甩开敌方;另一方面可通过射流干扰敌方队形,在关键时刻起到出其不意的效果。
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05
儿童时代·幸福宝宝(2020年9期)2020-09-08
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
家教世界·创新阅读(2019年11期)2019-12-10
红领巾·探索(2019年8期)2019-08-21
人生与伴侣·共同关注(2018年8期)2018-02-16
创新作文(1-2年级)(2017年7期)2017-12-26
小星星·阅读100分(高年级)(2017年3期)2017-03-22
