
兼顾水面航态UUV 性能和功能综合优化设计
2021-01-19 08:10程占元杨松林汪保江施妍蔡城岐
舰船科学技术 2020年12期
程占元,杨松林,汪保江,施妍,蔡城岐
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
0 引 言
伴随着相关技术的快速发展,水下无人艇(UUV)多被用于布雷排雷、侦察等军事用途以及勘探资源、沉船打捞、水下电缆铺设等民事用途[1]。UUV 具备超高的隐蔽能力,有较强的续航力、作战和突击能力等诸多优势,但其自我保护力不强,水下联络较困难,不易实现双向、及时、远距离的通信,且容易受环境影响,掌握敌方情况比较困难。水面无人艇(USV)可承担环境监测、监视侦察、远程打击、搜捕、水文地理勘察、远程通信等任务,但USV 在水面作业目标大,容易被发现,防御能力弱,且易较大遭到海面风浪的影响。无论是UUV 还是USV,都有一定的局限性[2-3],因此,为了更好发挥各自的优势,实现两者的有效结合,发展一种以水下航行为主、可兼顾水面航态的UUV 已经势在必行,深入研究该型UUV 的快速性、操纵性和功能性显得尤为重要。多学科设计优化一般用在比较复杂工程系统和子系统,并且统筹各系统的彼此相关要素[4],因为设计过程中,关系到多个学科范围,进行UUV 的综合优化是无人艇设计的主要部分[5]。因此本文基于团队自编多学科综合优化软件,并进行了必要的改进,经过多种优化算法进行计算分析,得出了优良的计算结果,体现了优化软件的准确性和可靠性,该计算结果为新艇型的开发设计提供了有效的数据支撑和参考依据[6-7]。
1 无人艇优化设计数学模型
1.1 主艇体设计
预计把UUV 的主艇体分成首部、平行中体和尾部型线部分。其设计艇型的首段为半椭圆,尾段是一段圆锥体,可以适当与平行中体流线型过渡,平行中体可以适当增大长度。为能同时起到兼顾水面的效果,可搭载一种可伸缩支柱平台,在其上部搭载天线、传感器等一些装置,更高效的监测水面与水下,如图1所示。

图 1 主体和柱体基本型线图Fig. 1Basic profile of main body and column
在深入研究多种回转体形状几何特征基础上,阻力性能AUTOSUB 型回转型深潜器阻力性能相对较佳[8]。本文初步设计主艇体艇型参考AUTOSUB 型,对其进行改进,以更好起到对水面航态的兼顾性目的。
1.2 优化数学模型
1.2.1 设计变量
24 个设计变量:首段 Lh,平行中体段 Lm,尾段La,浮心纵向位置 Xf,螺旋桨直径 Dp,螺旋桨螺距比PDp,艇体中横剖面直径 Dp,螺旋桨盘面比Aeo,上部柱体长度 Lu,上部柱体宽度 Bu,上部柱体高度 Hu,螺旋桨转速 N,航速 Vs,水平舵的翼端弦长 doh,水平舵的根部弦长 dih, 水平舵的展长 Zh,垂直舵的翼端弦长dov,垂直舵的根部弦长 div,垂直舵的展长 Zv,精度X1、工作温度 X2、监测温度 X3、测温精度 X4、单个价格 X5。
1.2.2 目标函数
1)快速性子目标函数
参考并选择海军系数公式:

本文水下无人航行器以水下航行为主,忽略兴波阻力的影响,总阻力为:

2)操纵性子目标函数
UUV 的航行可从水平面和垂直面运动两方面探讨,共选择水平面稳定性横准数、相对回转半径、升速率3 个指标构成操纵性的目标函数,即

根据相关经验,无因次稳定性横准数和升速率越大则结果更优,相对回转半径越小则结果更优,式中β1β2β3均大于0,且β1·β2·β3=1。
其中水平面稳定性横准数
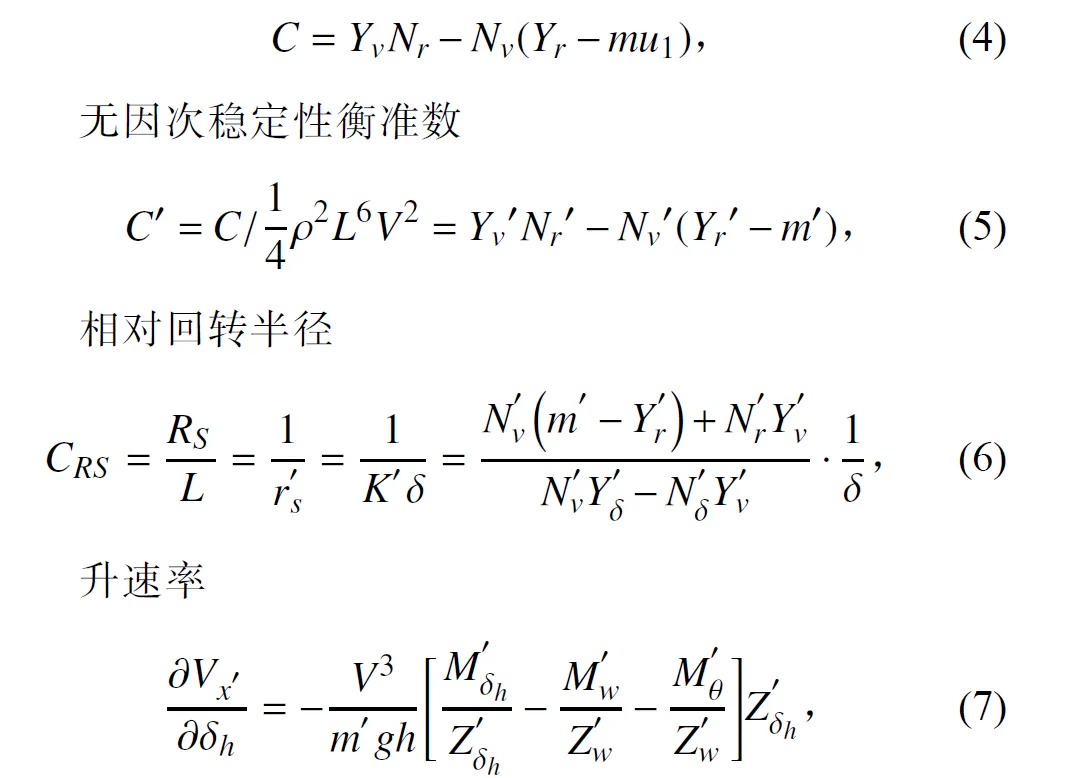
其中潜伏角为:

3)功能性子目标函数
在监测功能的优化设计过程中,内部因素以及外部因素都会对其有一定影响,对各项数据进行一系列的市场调研,进行模糊评判多个变量特征,因为这些特征符号不一,而且不在一个量级,因此在构造特征函数时,需要将其进行统一标准。通过模糊理论,并按照这些特征项的本质含义和实践统计,得出每一项具有实际意义的隶属度值,构造隶属度函数。对其综合评判并且进行响应面公式拟合得出各项系数,进而得出目标函数如下:

显然,目标函数值f3(X)越大表示功能模块的性价比越好。
4)总目标函数

式中:ε1,ε2,ε3均大于0,且 ε1·ε2·ε3=1,3 个子目标函数都是越大越好。
1.2.3 约束条件
1)浮性约束
无人艇优化计算后得到的排水体积,与设计的主艇体和支柱体的排水体积之和一致:

2)推力阻力平衡约束
螺旋桨有效推力与所受到阻力一致:
3)转矩平衡约束
螺旋桨通过轴系收到的转矩与螺旋桨受到的水动力矩一致:

4)定深直线航行平衡纵倾角约束
能够使UUV 在水中一定深度直航稳定运动时,纵倾角不大于10°。
5)定深直线航行平衡舵角约束
UUV 在水中一定深度直航时,不排除外流场不稳定等因素的干扰,促使必须转尾舵的舵角来恢复平衡,一般这个舵角不超过在±5°。
2 优化算法及综合优化计算分析
2.1 优化算法
2.1.1 遗传算法
遗传算法(GA)其主要原理是借鉴并根据大自然的物种进化的原则,精选出一种最佳解决方案的过程[9-10]。按照“物竞天择、适者生存”的原理,将最优值的求解过程表示成个体的适者生存过程,并通过选择、交叉、变异等使个体群逐代进化,输出为全局最优解。
2.1.2 混沌算法
混沌优化算法(CA)是一种新的优化算法,具有非线性、遍历性、随机性等特点。一个混沌变量具有几个方面的特点:随机性;遍历性,混沌变量可以不重复历经空间内所有状态;规律性。
2.1.3 粒子群算法
粒子群算法(PSO)是借鉴鸟类觅食现象而提出的一种新型优化算法,其特点具有易实现、收敛快、精度高等[11-14]。粒子群算法流程图如图2 所示。

图 2 PSO 算法的基本流程图Fig. 2Flow chart of PSO algorithm
2.2 优化计算及分析
本文的快速性、操纵性和功能特性3 个系统的初始权重设定如表1 所示。采用遗传、混沌和粒子群3 种算法进行计算。
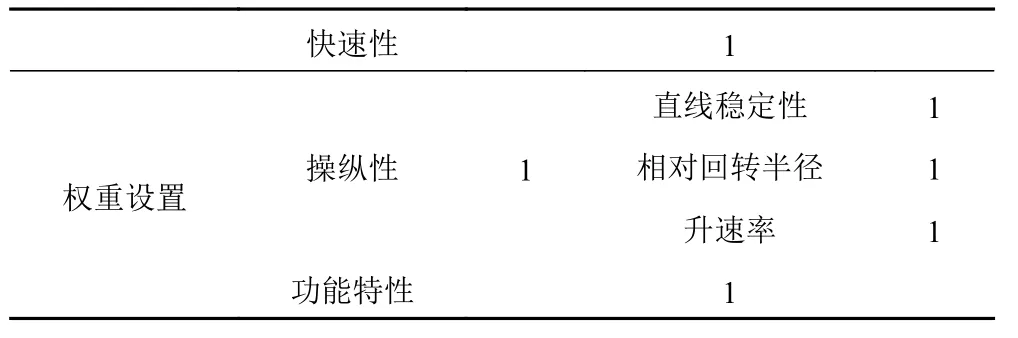
表 1 各优化系统初始权重设置Tab. 1 Set the initial weights of the optimization system
2.2.1 遗传算法优化计算
主要的数据如下设定:选取遗传代数为1 000~6 000,进化权重设成0.5,种群规模设成400,分别进行多次计算,选取各代数的最好结果,如表2 所示。
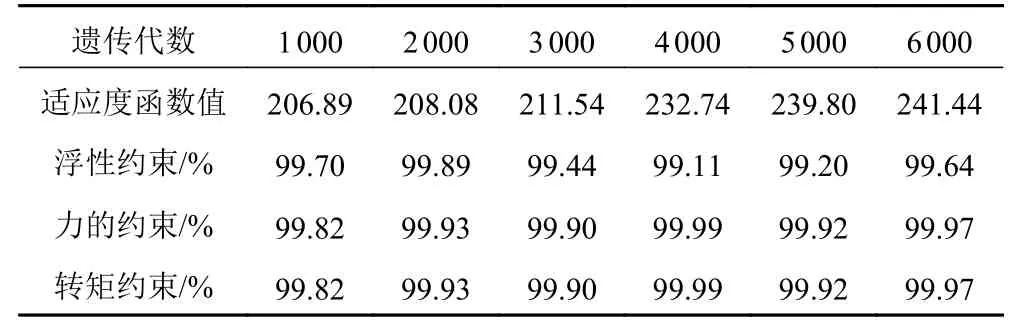
表 2 不同计算次数的计算结果Tab. 2 The calculation results of different calculation number
由表2 计算结果可以得出,约束条件均在99%以上。遗传代数对目标函数值的影响如图3 所示。
由图3 可以看出,遗传次数比较小的时候,函数值也相对较低,随着遗传代数的增加,其相应的适应度函数值也进行了正向的变化,并在一定程度上增加较快,最终到达了一个稳定的程度,增加缓慢,仅有小幅的波动。由此得出,遗传次数达到5 000 代时,其相对应的适应度函数值趋于稳定,所计算的结果相对较优。

图 3 适应度函数值随遗传代数的变化曲线Fig. 3Change curve of fitness function value with genetic algebra
2.2.2 混沌算法优化计算
本文在对混沌算法进行优化计算时,主要讨论的是在混沌算法中优化代数对目标函数值的影响情况,如表3 所示。
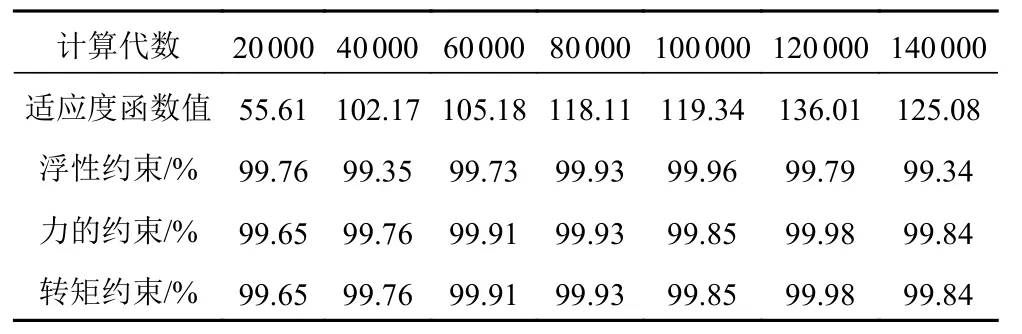
表 3 混沌算法不同迭代次数优化结果Tab. 3 The calculation results of different optimization algebra of chaos algorithm
由表3 计算结果可以得出,约束条件均在99%以上。
由图4 可以看出,伴随着混沌计算代数的增大,适应度函数值也表现出增大的趋势,波动也相对较大。对比遗传算法计算结果,可以看出,混沌算法的函数值普遍小一些,即采用混沌算法相对遗传算法优化计算效果较差。
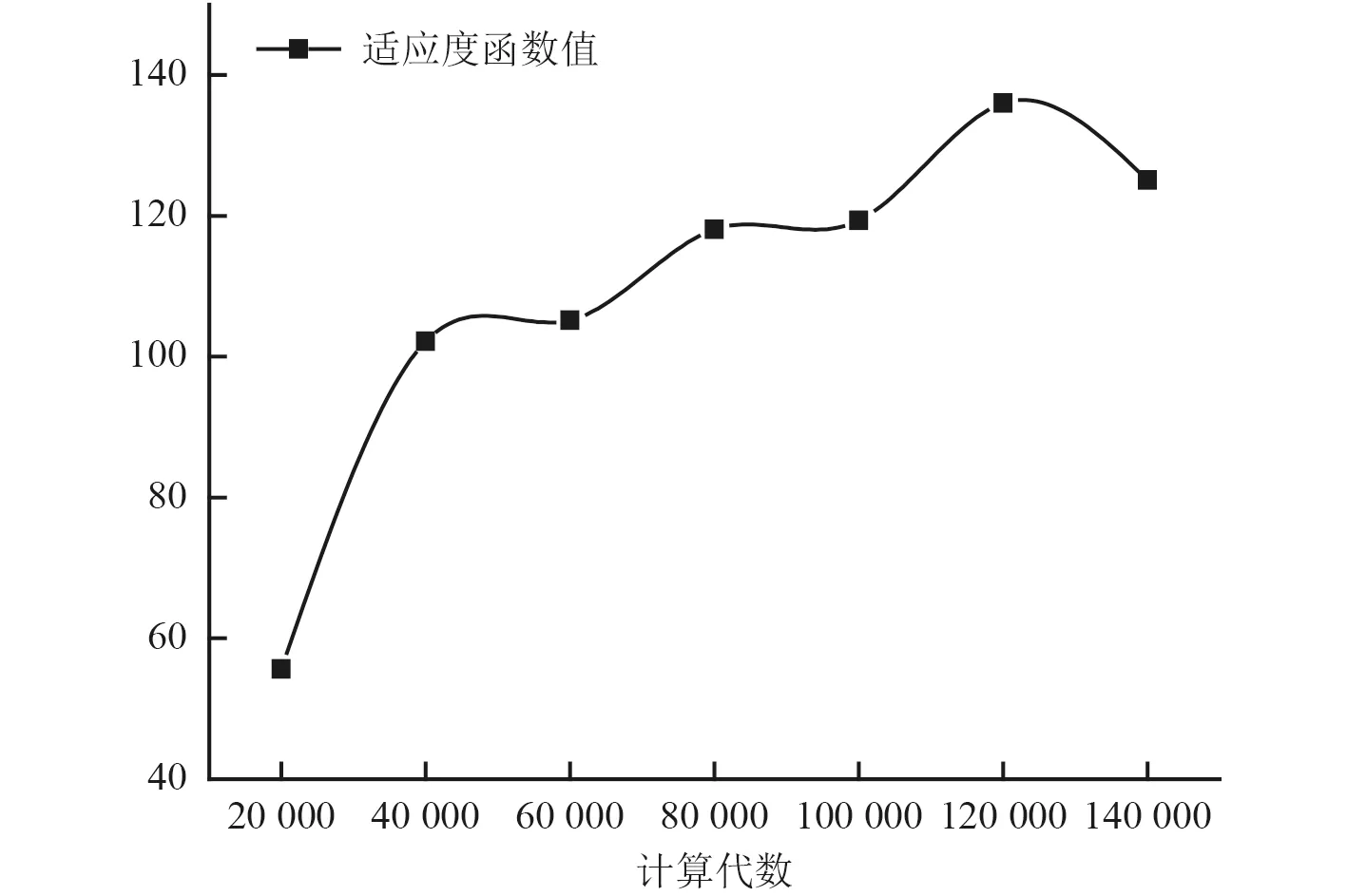
图 4 适应度函数值随计算代数的变化曲线Fig. 4Change curve of fitness function value with calculation algebra
2.2.3 粒子群算法优化计算
主要数据设定如下:种群规模400,最大粒子飞行速度与区间概率0.15,变权重0.9~0.4,选取6 组优化代数进行计算,计算结果汇总如表4 所示。
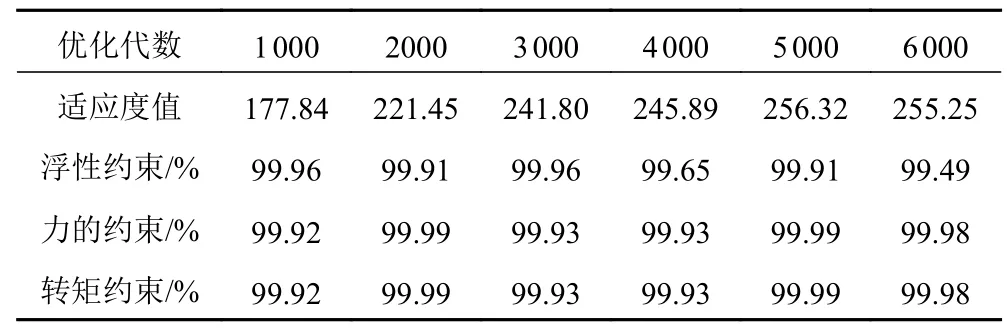
表 4 粒子群算法不同优化代数的计算结果Tab. 4 The calculation results of different optimization algebra of PSO algorithm
由表4 可以看出,所计算的数据值都相对较好,而且符合约束。
如图5 所示,在计算到较大的代数时,适应度函数值表现出更加稳定,增加缓慢,或有细微的变化波动。由此得出,优化次数达到5 000 代时,目标函数值趋于稳定,所计算的结果相对较优。
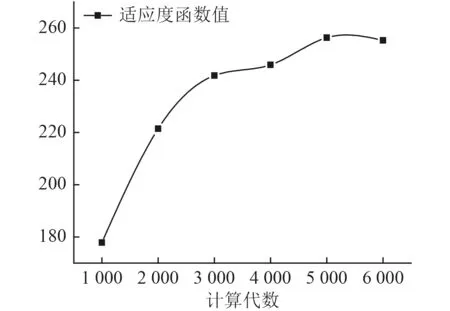
图 5 适应度函数值随计算代数的变化曲线Fig. 5Variation curve of fitness function value with calculation algebra
2.3 优化结果
根据上述几种计算的结果不难看出,根据粒子群算法算出来的数据明显更好,更符合要求,最终数据如表5 所示。
3 结 语
本文针对一种水下无人艇,设计一种支柱平台对传统艇型进行改进,使之能有效兼顾水面航态,结合快速性、操纵性、功能特性,构造总目标函数、约束条件以及惩罚函数,建立该型UUV 的综合优化数学模型,分别使用遗传算法、混沌算法和粒子群算法不同计算代数进行了该型UUV 的运算,从计算结果可以得出:
1)混沌算法计算结果的适应度函数值相对其他2 个算法较低,虽然遗传与粒子群算法计算结果更接近,但整体还是粒子群算法所计算的更优,相对更稳定;
2)随着计算次数的增加,3 种计算方法所计算的结果都呈现正向增加的变化趋势,且当计算次数到达5 000 时,适应度函数一般达到最大值,并满足约束条件;
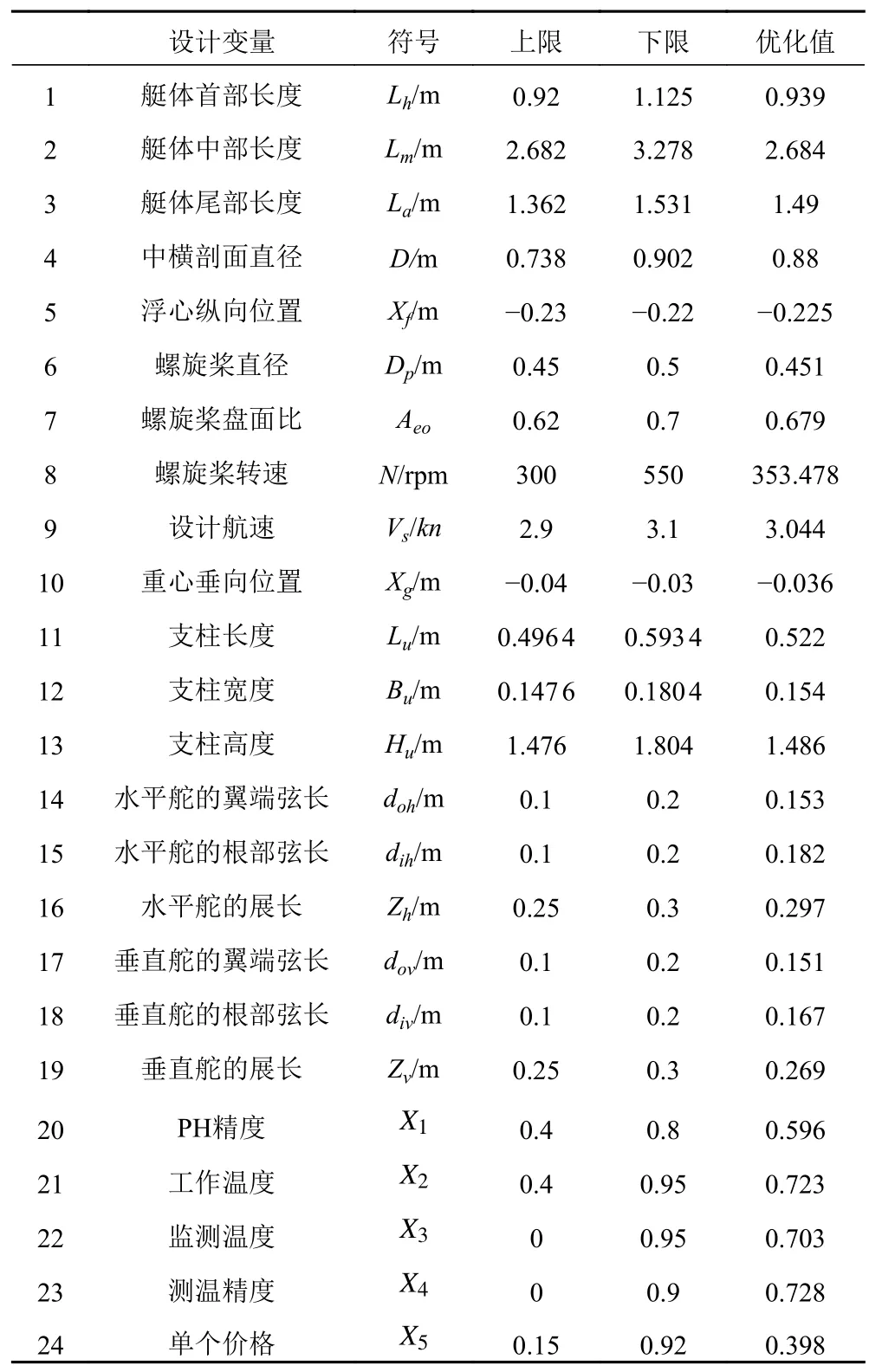
表 5 最佳优化的设计变量结果Tab. 5The best optimized results of design variables
3)相比其他2 种优化方法,使用粒子群算法得出的浮性约束、力的约束和转矩约束的值多在99.9%以上,惩罚值更易达到1,更易满足约束;
4)功能方面的结果提供了一个更优的参考值,可以更好选择一个适合实际需求的功能设备,有效避免成本的过高与资源的浪费。
本文对传统回转体进行了改进,并对改进后的回转体进行综合优化。其相对优势一是可有效提高稳定性,二是在工程实际应用尤其是军事应用中可在主体与支柱内安装可靠的升降装置,使之对水面航态具有一定的兼顾性,具有更高的可靠性和操作性。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
中学生数理化(高中版.高二数学)(2022年1期)2022-04-26
华东师范大学学报(自然科学版)(2021年6期)2021-01-01
小天使·三年级语数英综合(2017年6期)2017-06-07
小天使·三年级语数英综合(2017年6期)2017-06-07
中学生数理化·高三版(2017年3期)2017-04-21
当代旅游(2016年10期)2017-04-17
中学数学杂志(高中版)(2016年1期)2016-02-23
财经理论与实践(2015年2期)2015-04-16
中学生数理化·八年级数学人教版(2008年6期)2008-09-05
