
基于改进迭代学习的参数不确定卫星姿态控制
2021-01-26 10:50柯晓曼吴云华郑墨泓李文星杜津铭陈志明
系统工程与电子技术 2021年2期
柯晓曼, 吴云华, 郑墨泓, 李文星, 杜津铭, 华 冰, 陈志明
(南京航空航天大学航天学院, 江苏 南京 210016)
0 引 言
随着卫星在轨服务的迅速发展,燃料加注、部件升级和替换、大型卫星在轨组装等任务对卫星姿态控制提出更高的要求。比较著名的在轨服务计划包括美国“凤凰计划”和“地球同步卫星机器人服务(robotic servicing of geosynchronous satellites, RSGS)”。“凤凰计划”为实现部件重复利用,将不同失效航天器的有效部件重新组装;RSGS项目的长期目标是以空间机器人为开端,在地球同步轨道(geosynchronous orbit, GEO)上建立持久自主服务能力卫星,提供可靠、高性价比的GEO卫星服务[1]。显然,在轨服务过程中卫星的质量和质心将发生变化,从而导致卫星转动惯量等参数产生较大变化。因此,针对参数不确定的卫星姿态敏捷机动控制成为当前的研究热点。传统的滑模变结构[2-4]可能出现抖振情况,自适应[4-6]容易产生误操作,反步法[3-4,7-9]系统需要满足严格反馈,并且上述控制方法存在需要较多先验信息等缺点。而基于机器学习的智能控制通过自我学习能力完成控制,具有需要先验信息少、无需精确的动力学建模等优点,将其应用于参数不确定的卫星姿态控制具有较大优势。因此,本文基于智能控制方法,设计迭代学习控制(iterative learning control, ILC)器[10-15],减小对动力学模型的依赖,完成姿态敏捷机动任务,有效解决周期性干扰带来的误差,提高姿态控制的动态性能、鲁棒性与敏捷性。
国内外许多学者对ILC进行了详细的介绍和研究。代明光等[11]提出一种开环比例微分型迭代学习非线性增益自适应控制律,验证收敛条件,但并未考虑航天器具体模型及执行机构输出能力等实际应用情况。WANG[12]提出了一种预测ILC并证明了其收敛性,但没有考虑存在干扰情况下的ILC律的收敛性。WU等[13]使用预测ILC,在系统已稳定的情况下有效提高了系统姿态机动精度,但是其采用了Bang-Bang控制来实现敏捷机动,即整个机动过程中不存在匀速阶段,该控制模式对执行机构的要求较为严苛,需要执行机构长时间工作在较大力矩输出状态并满足大力矩突变的要求;并且对参数存在较大不确定性的系统,没有在执行机构的输出能力范围内对如何实现快速大角度姿态机动予以综合考虑。HU等[14]设计了一个迭代学习观测器,并详细证明其收敛性,基于此设计,提出一个积分型滑模控制律,将虚拟控制信号分别施加于三轴,最后通过鲁棒控制分配算法实现三轴姿态控制,具有一定的稳定性和鲁棒性。LEE等[15]针对容错航天器的姿态机动设计了一种改进ILC律,可有效应对外界干扰和执行机构故障,具有一定的鲁棒性,但没有考虑航天器参数不确定的问题。
对于在太阳同步轨道运行的气象、侦察和地球资源卫星等,每天在相同地方指定地点,在大致相同的条件下观测地面,意味着卫星工作环境近似,受到的力矩干扰呈现周期性变化,因此提出从智能控制算法出发设计ILC来进行姿态控制,有效解决周期性干扰,提高姿态控制系统性能;并且减小对模型的依赖,解决燃料变动问题,有利于实现在轨部件组装后的卫星姿态控制以提高有效部件使用寿命。
除了可靠、性能优异的控制方法,参数不确定的卫星姿态敏捷机动任务还要求执行机构能够输出高精度大力矩。控制力矩陀螺(control moment gyro, CMG)凭借其力矩放大的优点成为较优选择。然而,CMG存在奇异问题[16-17],包括椭圆奇异和双曲奇异,当其陷入奇异状态时,将产生较大的输出误差,无法实现控制目标。WIE[18]介绍的CMG加权伪逆操纵律可精确输出期望控制力矩大小,但无法规避几何奇异点。因此,有研究[19-21]提出引入反作用飞轮(reaction wheel, RW),使用CMG和RW组成的混合执行机构能有效地解决上述问题。本文采用金字塔构型CMG集群配合3个正交RW的混合执行机构,实现对上述奇异和饱和问题的规避。
基于卫星姿态敏捷机动的目标,针对参数不确定的卫星,本文结合递阶饱和控制和ILC,设计了改进预测迭代学习姿态敏捷控制策略,减小控制算法对动力学模型的依赖性,实现高精度姿态敏捷机动,提高系统的性能,能够应用于具有在轨航天器对接背景的工程及定轨周期性运动的卫星等,具有较高的实际应用价值。
1 姿态运动学和动力学
1.1 常用坐标系
地心惯性坐标系OXiYiZi:原点位于地球质心,OXi轴指向春分点,OZi轴为地球自旋轴并且指向北极,OYi轴由右手坐标系确定。
轨道坐标系OXoYoZo:原点位于卫星质心,OXo轴指向卫星的速度方向,OZo轴为地心与卫星质心的连线并且指向地心,OYo轴由右手坐标系确定。
卫星本体坐标系OXbYbZb:坐标系固连在卫星本体上,原点位于卫星质心,三轴与卫星的惯量主轴重合。
1.2 姿态运动学
用四元数Q=[q0,qT]T描述本体坐标系OXbYbZb相对于轨道坐标系OXoYoZo的方位。q=[q1,q2,q3]T为四元数矢部,q0为四元数标部。
基于四元数的卫星姿态运动学方程为
(1)
(2)


(4)
基于误差四元数的卫星姿态运动学方程为
(5)
1.3 姿态动力学
考虑混合执行机构,卫星的动量矩为
(6)

考虑存在外界干扰力矩d,则卫星的姿态动力学方程表示为
(7)
式中,‖d‖≤dmax。
由式(3)可得
(8)

2 姿态敏捷机动控制器设计
2.1 控制器整体设计框架
控制器基于传统反馈控制方法和ILC。传统反馈控制方法采用改进递阶饱和控制,以实现原系统稳定,处理非周期性干扰,ILC则适用于存在重复性干扰力矩且具有重复运动性质的被控对象。
本文采用并联控制结构[22],如图1所示。ILC和反馈控制器对被控对象实施的控制分量较容易确定,从而简化设计过程。ILC律中ek可以使用当前时刻t或t+δ时刻的取值,后者为反馈-预测ILC律。

图1 反馈-ILC流程图(并联结构)Fig.1 Feedback-ILC flow chart (parallel structure)
考虑混合执行机构的输出能力,基于迭代学习的姿态敏捷机动控制器为
(9)
式中,U为控制约束即所能输出最大力矩;ufb,k(t)和uff,k(t)分别为反馈控制和ILC提供的控制力矩。
本文首先对递阶饱和控制进行改进,并以其为基础引入ILC。
2.2 改进递阶饱和控制器
综合考虑卫星在轨运行的实际状态和任务执行要求,包括精确性、敏捷性和鲁棒性等,基于改进预测迭代学习的姿态敏捷机动控制器采用对执行机构要求较为友好的递阶饱和控制,使系统处于稳定控制状态。

将状态方程分为状态量、控制量、干扰量3个模块进行分析控制,可表示为

(10)
式中,B=[0J-1]T。则改进递阶饱和控制律为
(11)
(12)
式中,L为控制约束;p和c为控制增益;a为最大机动角加速度;饱和函数satA(*)定义为
(13)
式中,A为一个非负常值。
将控制力矩ufb代入式(8)可得
(14)
式(5)与式(14)构成误差四元数姿态和姿态角速度的状态方程。
2.3 改进预测ILC器设计
卫星转动惯量存在较大的不确定性,此外,测量误差及干扰力矩存在,且控制器参数存在相互制约问题,难以同时满足高精度、高敏捷性和无超调要求。因此,提出加入改进预测ILC,提高姿态机动的性能。ILC律中的uff,k+1=f(uff,k,ek)由上一层控制律决定。
机动总时长为T,对于[0,T-δ],预测ILC律[13]为
uff,k+1(t)=uff,k(t)-kpJqe,k(t+δ)-kdJωk(t+δ)
(15)
对于[T-δ,T],预测ILC律为
uff,k+1(t)=uff,k(t)-kpJqe,k(T)-kdJωk(T)
(16)
式中,uff,k(t)表示在第k层t时刻ILC量;xk(t+δ)表示在第k层t+δ时刻状态量;kp和kd为控制增益;δ为一个取值较小的采样周期;定义uff,0(t)=0。
式(15)所示的预测ILC律并未考虑执行机构状态,姿态敏捷机动过程无法实现加速-匀速-减速3个阶段,并且未综合考虑输出力矩要求和姿态角速度大小限制,因此对控制律进行改进,提出改进预测ILC律为
uff,k+1(t)=uff,k(t)-kpJsatL[qe,k(t+δ)]-kdJωk(t+δ)
(17)
2.4 控制器性能分析
控制器主要分为改进递阶饱和控制和改进预测ILC两个部分。本文对原递阶饱和控制进行改进,考虑陀螺效应耦合项和轨道角速度的变化项,下面通过Lyapunov第二方法对改进递阶饱和控制器稳定性进行证明。
根据式(11)递阶饱和控制律可得卫星姿态状态方程为
(18)
式中,P=pI3×3;C=cI3×3。
构造正定Lyapunov函数(能量函数)为
(19)
在非平衡点处,有V>0,对式(19)求导有


(21)


改进预测ILC作为前馈控制器不影响系统的稳定性。因此,控制器性能分析重点为改进预测ILC的鲁棒收敛性问题,下面阐述该控制律收敛条件。
在控制器正常工作(未达到饱和力矩)时,卫星姿态误差状态方程为
(22)
(23)

引理 1[12]利普希茨连续条件:对于在实数集子集的函数,f:D⊆R→R,若存在常数K,使得‖f(a)-f(b)‖≤K‖a-b‖∀a,b∈D,则称f符合利普希茨条件,对于f最小的常数K称为f的利普希茨常数。
f(x)=[f1(x),f2(x)]T,B=[0,J-1]T,b=J-1满足引理1,在时域[0,T]内,f(x)关于x满足一致全局利普希茨条件,且定义B有界,可得:‖f(x)‖≤cf‖x‖,‖B‖≤bB,‖f1(x)‖≤cf1‖x‖,‖f2(x)‖≤cf2‖x‖,‖b‖≤bb,其中,cf,cf1,cf2分别为函数f(x),f1(x),f2(x)的利普希茨常数,bB和bb为函数B和b的范数约束。

(24)
定理 1对式(22)施加改进预测ILC控制律式(24),如果‖I-δΓB‖≤ρ<1,δ为非常小的正数,循环迭代,当k→∞,uff,k和xk一致有界,收敛于一个指定的范围。
当参数Γ的选择满足定理1时,基于改进预测ILC的姿态敏捷机动控制器收敛,uff,k对所有迭代学习层数k一致有界,状态量收敛。δ为采样周期,表示预测时间段,与参数Γ相制约,在一定范围内,选择的δ较大时,参数Γ选择范围较小,反之亦然。
证明对式(24)所示改进预测ILC律进行鲁棒收敛性证明。状态量x(t+δ)可表示为
(25)
将式(25)代入式(24)有


(26)
式(26)两边取范数,有
‖uff,k+1(t)‖=
‖(I-δΓB)uff,k(t)-kpJsatL{x1,k(t)+
(27)
又因为
‖satL[x1(t)]‖≤‖x1(t)‖
(28)
可得
‖uff,k+1(t)‖≤ρ‖uff,k(t)‖+bΓ1‖x1,k(t+δ)‖+
Ο(δ2)≤ρ‖uff,k(t)‖+bΓ1‖x1,k(t)‖+
ρ‖uff,k(t)‖+(bΓ+bΓcfδ)‖xk(t)‖+bΓbBdmaxδ+Ο(δ2)
(29)
由式(25)可得xk(t)的等式,对其两边求取范数,有
‖xk(t)‖=

(30)

由引理2,对于式(30)可得
‖xk(t)‖≤
(31)
将式(31)代入式(29)得
Ο(δ2)≤ρ‖uff,k(t)‖+(bΓ+bΓcfδ)‖xk(0)‖ecft+
bΓbBdmaxδ+Ο(δ2)
(32)
对式(32)左右乘上e-λ t,定义γ=max{(bΓ+bΓcfδ)bB,cf},并且λ>γ,可得
e-λ t‖uff,k+1(t)‖≤
ρe-λ t‖uff,k(t)‖+(bΓ+bΓcfδ)‖xk(0)‖e(cf-λ)t+
(33)
λ范数性质 1[10]对于常向量c∈Rn,‖c‖λ=‖c‖。
对式(33)左右求λ范数,则有

(34)
式中,
ρ′=ρ+γ(1-e(γ-λ)T)/(λ-γ)
γ′=bΓ+bΓcfδ
当参数Γ选择满足‖I-δΓB‖≤ρ<1,选择合适的λ和γ可使ρ′<1,因此uff,k+1(t)的λ范数收敛于以0为中心,κ/(1-ρ′)为半径的邻域内。
所以有
(35)
同理,可证
(36)
由此可证,当‖I-δΓB‖≤ρ<1,选择合适的λ和γ可使改进预测ILC律收敛,ILC律uff,k和状态量xk一致有界。
证毕
改进预测迭代学习的姿态敏捷机动控制考虑到执行机构的输出限制,对力矩、姿态角和姿态角速度加入一定饱和约束条件。相较于经典的ILC,该改进预测ILC律具有较高的敏捷性和鲁棒性,姿态机动过程中存在匀速阶段,符合执行机构工作状态,可以应用于存在内部与外界干扰、所处初始姿态不同并且转动惯量不确定的航天器姿态机动任务。
3 混合执行机构
3.1 混合执行机构构型配置
采用金字塔构型CMG集群[25-26]及3个正交RW组成的混合执行机构,如图2所示。通过CMG和RW协同工作,解决CMG奇异和RW饱和问题。

图2 混合执行机构构型示意图Fig.2 Configuration diagram of hybrid actuator
CMG框架角为α=[α1,α2,α3,α4]T,框架倾角为β,每个CMG转子动量矩都为h0,CCMG为CMG系统在卫星本体坐标系的构型矩阵。RW系统转动惯量为JRW=diag(JRW1,JRW2,JRW3),RW的角速度为ΩRW=[ΩRW1,ΩRW2,ΩRW3]T。执行机构动量矩Hact为CMG系统动量矩HCMG和RW系统动量矩HRW之和,即

(37)
式中,定义s(β)≡sinβ;c(β)≡cosβ;s(αi)≡sinαi;c(αi)≡cosαi。
(38)

在CMG系统可输出3轴力矩的情况下,当rank(JCMG)<3时,CMG处于奇异状态。引入CMG奇异度量SCMG和RW饱和度量SRW,从而判断是否可以规避奇异状态和饱和状态。
(39)
(40)
SCMG越小,CMG越趋近奇异状态,当SCMG=0,CMG于奇异状态;SRW越大,RW越趋近饱和状态,当SRW=1,RW于饱和状态。
3.2 混合执行机构操纵律
CMG经典的加权伪逆操纵律[18]为
(41)

(42)
加权伪逆操纵律优点是能够精确无误差地输出控制器所要求的控制力矩,但当CMG处于奇异状态的时候,无法解算其伪逆解,因此无法使用该操纵律。混合执行机构加权伪逆操纵律可以解决该问题,操纵律[26]为
(43)
式中,加权矩阵W=WT。通过研究发现,基于混合执行机构的零运动操纵律可以规避部分内部椭圆奇异点和双曲奇异点,提高执行机构的性能。零运动操纵律[26]为

(44)
(45)
式中,零运动强度参数ϑ>0,大小选择与SCMG有关;d′为零运动矢量;混合执行机构整体性能分析函数Sact定义为
(46)
式中,参数λi和τi为正数,λ1+λ2+λ3=1,τi的选取与饱和度及奇异度的阈值有关。
4 数学仿真及分析
针对转动惯量具有较大不确定性的卫星,应用基于改进预测迭代学习的敏捷机动控制器,并采用混合执行机构。与文献[8]提出的基于反步法的航天器鲁棒自适应姿态机动控制器进行对比。为了便于比较,文献[8]的姿态控制律为



设定外界干扰力矩为

敏感器测量噪声为0.005°,0.001(°)/s。轨道半径为6 900 km。
本文提出的控制器和混合执行机构参数如表1和表2所示。基于改进预测迭代学习的敏捷机动控制器的系统姿态角误差仿真结果如表3所示。姿态角误差和姿态角速度仿真结果分别如图3和图4所示。基于反步法的航天器鲁棒自适应姿态机动控制器的系统姿态角误差和姿态角速度仿真结果分别如图5和图6所示。

表1 控制器参数

表2 混合执行机构参数

表3 姿态角误差仿真结果


图3 姿态角误差Fig.3 Attitude angle error


图4 姿态角速度Fig.4 Attitude angular velocity

图5 姿态角误差(反步法)Fig.5 Attitude angle error (backstepping)

图6 姿态角速度(反步法)Fig.6 Attitude angular velocity (backstepping)
姿态敏捷机动只使用改进递阶饱和控制器(uff,1(t)=0),即第1层姿态控制,从仿真结果可知,系统动态性能不佳,存在较大峰值,振荡次数较多,超调问题严重,主要原因为转动惯量存在不确定性。因此,引入改进预测ILC,在第2层姿态机动过程中超调量有所减小,直至第10层姿态机动过程中超调量较小,姿态机动时长较短。由航天器第1层至第10层姿态机动仿真结果可知,该改进型控制器有效地减弱了调节过程中存在的峰值,第10层超调量减小至第1层超调量的2.30%,调节时间减小至92.88%,提高了系统的动态性能,系统的敏捷性较好,并且姿态机动过程中存在匀速阶段,对执行机构的要求较为友好;姿态角误差为0.005°,稳定后系统姿态角误差较小,姿态角速度为0.002(°)/s,系统具有较高的精确性。
由图5和图6可知,采用已有基于反步法的航天器鲁棒自适应姿态机动控制器,系统在68.411 s时达到控制目标,调节时间略长于本文提出控制器的调节时间(36.489 s),姿态角误差为0.009°,稳定后姿态角速度为0.004(°)/s,姿态机动过程不存在匀速阶段。
仿真结果可证明本文提出的控制器相较于已有控制器具有更高的敏捷性与精确性,姿态角速度幅值更小且存在匀速阶段,具有更佳的控制性能。因此,本文提出的控制器设计合理,可以完成指定的任务指标,有效应对外界干扰和参数不确定性问题。
uc=[ucxucyucz]T为期望控制力矩,ue=[uexueyuez]T为控制力矩输出误差。基于改进预测迭代学习的敏捷机动控制器与执行机构的仿真结果如图7~图9所示,基于反步法的航天器鲁棒自适应姿态机动控制器与执行机构的仿真结果如图10~图12所示。


图7 期望控制力矩Fig.7 Desired control torque
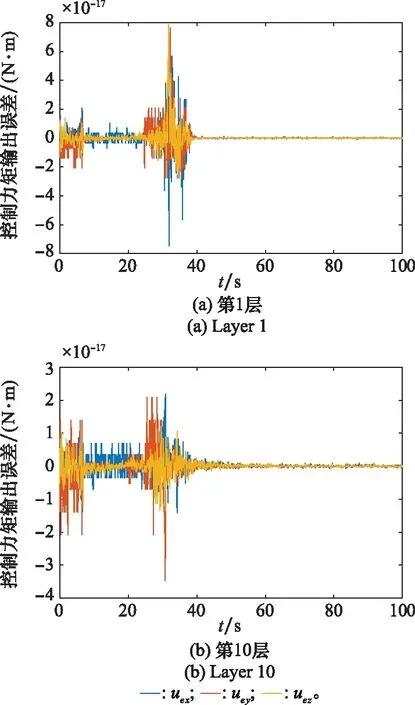
图8 控制力矩输出误差Fig.8 Output error of control torque

图9 混合执行机构性能Fig.9 Hybrid actuator performance

图10 期望控制力矩(反步法) Fig.10 Desired control torque (backstepping)

图11 控制力矩输出误差(反步法)Fig.11 Output error of control torque (backstepping)

图12 混合执行机构性能(反步法)Fig.12 Hybrid actuator performance (backstepping)
因为第1、2、9、10层控制力矩输出误差和执行机构性能度量函数较为相似,故只展示第1层和第10层仿真结果图。由图7与图10对比可知,本文提出的控制器相较于基于反步法控制器具有较多优点:姿态机动过程不存在力矩较大突变,力矩变化较为平缓,执行机构无需长时间处于大力矩输出状态。由图8和图11可知,输出控制力矩误差较小,误差在可接受范围内,基于零运动操纵律的混合执行机构能精确输出期望力矩。由图9和图12可知,SRW较小,SCMG较大,证明该操纵律规避了CMG群奇异问题和RW组饱和问题,具有优秀力矩输出性能。
5 结 论
针对参数不确定的卫星,在存在外界干扰、量测噪声的情况下,进行姿态敏捷机动控制。
(1) 改进递阶饱和控制可处理陀螺效应耦合项和轨道角速度变化项的影响,使系统处于稳定状态且满足执行机构性能约束,物理意义明确,便于控制器鲁棒收敛性能分析。
(2) 基于改进预测迭代学习的姿态敏捷机动控制可提高系统动态性能和敏捷性,有限层数迭代后,系统超调量减小了97.70%,调节时间减小了7.12%,对参数不确定性和外界干扰等问题具有较高的鲁棒性与精确性。姿态敏捷机动过程考虑执行机构输出力矩限制,可实现加速-匀速-减速3个阶段的姿态运动。
(3) 考虑到姿态敏捷机动需要执行机构能够提供较大的输出力矩,使用CMG和RW组成的混合执行机构,并采用零运动操纵律有效地解决了CMG奇异问题和RW饱和问题。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
导航定位与授时(2014年2期)2014-04-27
河南科技(2014年1期)2014-02-27
