
基于BFGS算法的MEMS加速度计自动调零法
2021-03-05 14:03李春雨裴东兴
兵器装备工程学报 2021年2期
李春雨,裴东兴,瞿 竟
(1.中北大学 电子测试技术国防科技重点实验室、太原 030051;2.中北大学 仪器科学与动态测试教育部重点实验室, 太原 030051)
高g值加速度存储测试系统在军事武器精确打击和航空航天系统的姿态控制中,尤其是加速度的精确获取,对于引信触发信号是至关重要的。MEMS加速度传感器由于其固有频率高,可测加速度量程大,可靠性高等优势,在武器的发射、制导、侵彻中得到广泛应用。同时,弹载测试系统对微型化、低功耗、高可靠性提出了更高的要求[1-2]。
高g值MEMS加速度计的内部由于全桥传感器各桥臂电阻制造不确定度的原因,阻值不会完全相同,在集成MEMS加速度计零位输出较大时(电桥不平衡),应该采用一定的补偿措施,使得传感器的静态输出接近于0.00 V。本文摒弃传统的电位器调平方法,充分考虑抗冲击性,采用高精度数字电桥,用BFGS方法,求解出需要并联补偿的阻值,并精确控制数字电位器,自动调节电桥平衡。还能根据长时间加速度传感器下的温度漂移带来的系统误差,自动的调平电路,获得更加精确的信号。有些复杂的算法和数据在弹载存储测试系统中需要实时求解处理,本文就探索了一种应用于DSP的非线性方程组的求解算法,最后在苏试STI冲击台进行了测试,在高台跌落、模拟弹体冲击试验中,验证了系统的可行性和算法的可靠性。
1 设计方案
如图1所示,4个压敏电阻组成全桥式应变传感器[3]。传感器的核心采用单晶体结构的高纯度单质硅,使用MEMS工艺在可以发生挠度形变的梁上集成4个电阻。当加速度存在时,4个应变电阻阻值就会产生变化,并使得电桥产生微小输出。在量程范围内,输出与加速度是线性关系[4]。输出端电阻在2.5 kΩ左右,在3.3 V下,满量程输出35 mV。

图1 MEMS加速度计内部结构示意图
基于高g值MEMS加速度计的存储测试系统[5]主要由高g值MEMS速度计及其他传感器、信号调理、A/D转换、数据存储、控制电路等组成,如图2所示。

图2 高g值MEMS加速度存储测试结构框图
信号调理模块主要包括温度补偿电路、自动调平电路、信号放大与硬件滤波电路[6-8]。由于考虑弹载空间有限和系统低功耗特性,同时为了获得更加纯净的有效信号,在此处没有选择BOOST升压电路,而是选择3.3 V低压差降压型MUX667电路供电[9],如图3所示。

图3 电源电路示意图
MEMS加速度计的内部原理如图1所示,加速度计输出信号后的放大电路如图4所示,当微小的应变信号输出后,通过放大电路调理至合适的电压范围,给后级二阶RC滤波器进行滤波处理。
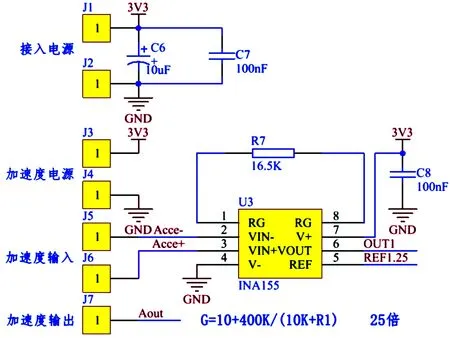
图4 加速度信号放大电路示意图
加速度信号滤波器采用采用二阶低通滤波,如图5所示,截止频率通过以下公式设定为
(1)

图5 加速度信号滤波器示意图
利用数字电位器,由于内部的非易失性存储器,出于电路安全性考虑,一般根据电路需求和系统输出,合理配置数字电位器。数字电位器,没有机械磨损和电刷,抗冲击性好[10]。如图6所示,通过DSP的I2C总线对数字电位器AD5235进行读写控制[11]。P2,P3端口等效替换图1中并联电阻R(2、1)或R(5、1))。

图6 数字电位器电路示意图
2 BFGS方法在控制系统中应用
2.1 参量方程建立
首先我们可以通过高精度万用表测量电桥的外部管脚,获得管脚间的阻值,并建立非线性方程组进行求解每个桥臂的阻值:

(2)
(3)
其中R=(R1,R2,R3,R4)T,f=(f1(R),f2(R),f3(R),f4(R)),c1是测出的R1和R2,R3,R4并联的值,c2,c3,c4同理可测。因为在弹载存储测试系统中不便于直接求解上述非线性方程组(2),于是提出了采用一种可以推广的基于BFGS算法求解的方法,并能利用数字电位器进行调平。
2.2 基于DSP系统的BFGS算法求解
BFGS算法是由C.G.Broyden、R.Fletcher、D.Goldfarb、D.F.Shanno 提出的,该拟牛顿法具有整体收敛性和较快的超线性收敛性,且由迭代产生的BFGS矩阵不易变为奇异矩阵,因而在本系统中所采用[12-14]。非线性方程的求解,尤其是对于弹载低功耗处理器而言是不易求解的[15]。若采用常见的牛顿迭代法来进行数值求解,当原函数的一阶导数很小时,就会产生零除错误;如果求得的解过小时,就会产生大量迭代步骤,占用硬件资源;初始值选的不合适,算法的局部收敛性就会受影响,所以此处采用基于DSP弹载系统的BFGS算法求解系统产生的非线性方程组。流程如图7所示。

图7 BGFS算法流程框图

2) 设定迭代初值r0,一般为了减少迭代次数,提高迭代精度,我们初值的选定方法为四个桥臂阻值取平均,即

(4)
由于MEMS传感器的桥臂电阻制造不确定度的影响,阻值略有不同,但都会在平均值附近,所以采用平均值后,可以减小与非线性方程组的解之间的初始误差,减小迭代方向上的迭代次数,加快迭代速度。对BFGS算法在DSP中移植解算的收敛性的影响表现为减少大量的迭代运算,节约DSP内部资源,同时对瞬态系统所需的快速性有了更高保证。
3) 精度阈值一般为自动调零并联数字电位器精度或者可用贴片电阻精度的十分之一。我们定义
gk=▽f(rk)
(5)
4) 利用近似Hessian矩阵的逆和在迭代k次处的梯度向量确定搜索方向,即拟牛顿方向
dk=-Dk·gk
(6)
5) 确定步长
(7)
sk=λkdk
(8)
(9)
6) 如果没有大于设定阈值,就要重新确定搜索方向,进入循环
yk=gk+1-gk
(10)
(11)
基于DSP系统的BFGS算法的是求解非线性问题的最优化方法之一,相比于牛顿法,BFGS算法利用DSP不需要求解复杂的Hessian矩阵的逆矩阵,而是利用正定矩阵来近似Hessian矩阵的逆,更不需要求解二阶导数,只需要知道目标函数的梯度即可,在运算复杂度上有了很大简化。更高阶的求解算法就要在DSP中设定更加复杂的运算步骤,不易实现且浪费大量硬件资源,所以在弹载测试系统中,根据需要求解目标的复杂度和解的预估特征,BFGS算法在笔者的应用场景中,是最适合采用的方法。
3 实验与分析
3.1 高加速度冲击台跌落实验
实验采用的苏试加速度冲击试验台,主要用于考核航空航天、兵器等军工领域的科研产品的抗冲击能力,冲击能量高,加速度峰值、脉冲持续时间等关键参数可调,图8是实验现场图。

图8 跌落冲击实验现场图
把MEMS高g值加速度传感器灌封好,置于冲击台上紧固,通过屏蔽线束接入已经写入BGFS算法的DSP弹载测试系统进行自动调零和采集,经过数据采集,频谱分析,软件滤波,定标,得到了如图9所示的加速度曲线。

图9 基于BFGS算法的自动调零加速度曲线
同时,用标准传感器得到的加速度曲线如图10所示。通过比较可以得出,经过BFGS算法自动调零的弹载测试系统能获取与标准传感器基本一致的时域特性(冲击脉宽和加速度峰值)。
3.2 模拟冲击实验
本系统还利用跌落实验(其现场如图11)来模拟实弹,进入实验现场后,确定好实验安全的距离,重锤通过导轨起落架上的电磁铁吸合吊起,吊起至一定高度进行自由落体,冲击较为硬质壳体。

图10 标准传感器加速度曲线

图11 模拟实验现场图
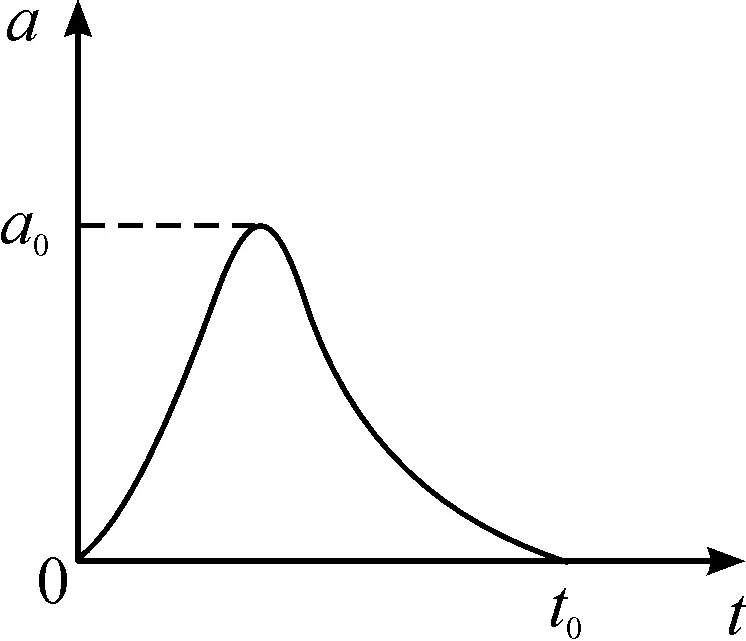
图12 冲击加速度曲线
跌落弹在自由落体中,撞击地面的加速度随时间变化可近似如图12所示的曲线。忽略一定能量损失,曲线与时间轴包围面积等于跌落弹落地前的速度,即
(12)
长时间持续做了多组实验,记录了不同跌落高度的幅值,如表1所示。通过高速相机,记录跌落过程,计算2 m、3 m、4 m、5 m、6 m跌落接触平均时间为700 μs、770 μs、812 μs、850 μs、878 μs,基本满足式(12),系统的长时间稳定性和数据的准确性得到证明。
表1 通过该算法调平传感器测量的马歇特锤加速度值

g
最后为了验证跌落数据的一致性和系统的重复性,通过表1数据,做了不同高度跌落一致性曲线(如图13所示)和每次实验的重复性曲线(如图14所示),我们可以看出,模拟弹在相同高度跌落时,系统测得的冲击加速度具有较好的一致性,且每次跌落的重复性较好。基于BFGS算法的高g值MEMS存储测试系统中,DSP利用数字电位器自动调零获得了较好的验证。

图13 不同高度跌落一致性曲线

图14 每次实验的重复性曲线
4 结论
本文提出了一种基于BFGS算法的高g值MEMS存储测试系统DSP利用数字电位器自动调零的方法,可以避开牛顿迭代法Hessian矩阵非正定的缺陷,保证较快的收敛速度,便于快速求解和精确调零,从硬件前端减少压阻式传感器温漂误差。
经过数值分析,冲击台和实弹模拟实验,验证了系统的可靠性和实验结果的一致性,为后期提供大规模电路的MEMS压阻式高g值传感器调零和惠斯通电桥配平衡提供了较为便捷的方法。
猜你喜欢
当代水产(2022年6期)2022-06-29
传感器与微系统(2022年3期)2022-03-23
飞控与探测(2021年5期)2022-01-05
中学生数理化·教与学(2018年10期)2018-12-06
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
新高考·高一物理(2015年5期)2015-08-18
计算技术与自动化(2014年1期)2014-12-12
理科考试研究·高中(2014年8期)2014-10-17
物理教学探讨(2009年4期)2009-05-25
