
电动轮椅自动调平装置的设计*
2021-03-05 07:15刘新妹殷俊龄
传感器与微系统 2021年2期
杨 冰,刘新妹,殷俊龄,李 帆
(1.中北大学 信息与通信工程学院,山西 太原 030051;2.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051;3.中北大学 电气与控制工程学院,山西 太原 030051)
0 引 言
随着智能化技术的飞速发展及全球老龄化进程的加快,对电动轮椅的需求日趋增加,电动轮椅的发展迎来良好的契机,研发更加智能舒适可靠的自动调平轮椅对满足医疗、辅助健康需求也具有重要的现实意义[1]。目前,我国的轮椅行业结构化单一,性能较差,市场上大多数电动轮椅经不起道路的颠簸,在坡度较大的斜坡上行驶也会带来极大危险与不便。为此,世界各国专业生产公司和科研机构相继研究解决这一问题,主要有手控调节和电控调节两种方式,但是存在调平角度限制和操作复杂等问题[2,3]。尤其是那些复杂的机械调控系统,其昂贵的价格导致大众消费者无法接受。
为了使轮椅适应复杂路况的同时实现实时调平,避免在上下坡时因重心不稳而发生事故,本文设计一种基于机电四点式菱形调平系统的自动调平装置,解决电动轮椅的自动平衡及调节角度的限制,预使轮椅座位在0°~30°的倾角范围内实现自动平稳快速调平,同时降低操作难度。
1 总体结构
本文设计的电动轮椅自动调平装置主要由驱动机构和自动调平机构两大部分构成,系统组成框图如图1。其中,驱动机构由4个直流推杆电机和2个驱动模块构成;自动调平机构由单片机,微机电系统(micro-electro-mechanical systems,MEMS)倾角传感器及液晶显示(liqued crystal display,LCD)屏构成。工作过程:通过安装在座椅中间位置的高精度双轴传感器检测横向与纵向的水平倾角;单片机通过SPI与MEMS倾角传感器进行通信,并对传感器采集到的X轴与Y轴的倾角信息进行高速处理;单片机通过处理这些数据,发送对应的PWM波,控制推杆的升降进行调平工作。

图1 系统硬件组成框图
2 驱动机构的设计
驱动机构可使用液压调平和机电调平,由于机电调平易操作、易加工、易维护、性价比高等优点,本调平装置选用机电调平[4]。所用电动推杆结构图如图2。

图2 电动推杆结构图
工作原理是通过控制电动机的起停和转向输出动力和转矩,电机减速由锥齿轮传递进行,带动丝杆螺母,把电机的螺旋运动转为推杆的直线运动来调平支腿[4],本文就是通过丝杠运动实现四条支腿的联动,进而实现座椅的自动调平。
2.1 电动推杆的设计
直流电动推杆因其良好的启动特性和范围广而平滑的调速特性、较强的过载能力、较大的转矩、价格合理的维护费用,被本文选用。并根据运动分析中的反解确定电动推杆的选取,反解就是已知动平台在空间坐标系中摆角求解各推杆的伸缩长度[5]。
本文的动平台即座椅是由X轴与Y轴的转动实现调平,具有两个自由度,图3为两自由度调平平台示意图。在实验台的上下平台分别建立坐标系,以菱形的中心点O建立动平台坐标系OXYZ,X轴平行于P1P3,Y轴平行于P2P4,以中心点O′建立静坐标系O1X1Y1Z1,X1轴平行于Q1Q3,Y轴平行于Q2Q4,Z轴方向按照右手定则,垂直于X轴、Y轴,下平台同理。
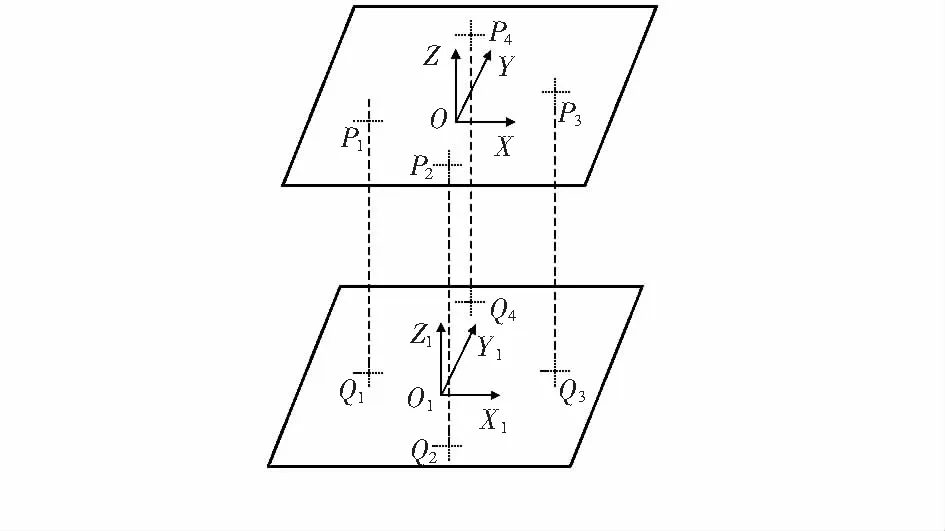
图3 两自由度调平平台示意图
本文通过倾斜传感器可知X轴倾角α和Y轴倾角β,需得到4个杆的伸缩长度,因此利用位置反解进行理论计算。动平台绕X轴和Y轴的变换矩阵分别为
(1)
故,动平台在空间中绕X轴和Y轴旋转后得到
(2)
假设两平台的长均为a,宽均为b,从图3中的数学模型可看出,动平台坐标系中的支撑点P1,P2,P3,P4坐标和底座坐标系中的支撑点Q1,Q2,Q3,Q4坐标可分别表示为
(3)
动平台经过旋转矩阵R后,与底座平台坐标差为
(4)
则推杆长度L1,L2,L3,L4为

(5)
式中α,β分别为X,Y轴的转动角度;a和b分别为座椅长度和座椅宽度;h为装置的高度。
在国标GB/T 12996——2012[6],GB/T 18029[7]中对电动轮椅车稳定性能要求和座椅长宽度要求见表1。

表1 电动轮椅稳定性性能和长宽要求
设定调平装置h=210 mm,角度范围-30°<α<30°,-30°<β<30°。当座位长度为amax;座位宽度为bmax,倾角α=30°,β=30°时,由式(5)计算得到电动推杆的最大伸长为L=110 mm 。
电动推杆的选用参考文献[8],因此,本设计选用特姆优医疗电动推杆U5,额定功率76.8 W,电压12 V直流驱动,负载速度最大时推力可达1 000 N,行程选用110 mm。
2.2 驱动模块
驱动系统的反应速度可决定调平系统的速度。采用L298N双H桥直流电机驱动模块驱动4个电动推杆,1个驱动模块可以实现对2个直流电动推杆的正反转和速度控制。控制4个推杆电路图如图4(a),(b)。

图4 L298N控制推杆的电路图
3 自动调平机构的设计
调平机构由SCA100T—D02倾角传感器、单片机STM32F103、电机等部分组成。倾角传感器实时监测当前物体的倾角,得到座位的4个维度后,将数据信息通过串口反馈给单片机STM32F103,单片机对这些数据进行处理后控制电动机,并采用中心点不动的调平方式,控制4个推杆上下往复运动,使座位始终与地面保持水平,达到自动调平的效果。
3.1 倾斜角度获取
MEMS倾角传感器是通过加速度计实时测量出物体的加速度,已知重力加速度与加速度传感器输出轴的关系,经坐标变换,算出加速度输出轴与重力加速度的夹角,可知物体倾斜角[9],图5为传感器的输出分量和倾角关系。

图5 加速度传感器输出分量与倾角关系
其中,x,y,z表示加速度传感器敏感轴输出方向,ρ,φ,θ分别为敏感轴输出与重力加速度的夹角。倾角测量满足式(6)
(6)
式中Ax,Ay,Az为传感器三轴输出响应,当重力加速度gn和Ax,Ay,Az已知时,便可算出倾角。
选用芬兰VTI公司的MEMS高精度双轴倾角传感器SCA100T-D02,有效测量范围±90°,XY双轴高分辨率双向测量[10],数字量输出分辨率0.01°,输出灵敏度2 V/gn,AD转换时间150 μs,稳定性高,噪声低,工作温度范围宽(-40~+125 ℃),可抵抗超过20 000gn的机械冲击[11,12],有利于加快自动调平的速度和稳定性,倾角获取电路见图6。

图6 倾角获取电路
MOSI和MISO作为SCA100T数据输入和输出线,并由具有72 MHz CPU频率的STM32F103ZET6单片机对实时接收到的X轴与Y轴倾角数据进行高速处理。
3.2 调平方式及策略
调平系统水平调节多用三支撑、四支撑、六支撑等方式,通过对支撑结构的调整使支撑面在外界干扰即颠簸路面、上下坡等情况保持水平状态。三支撑调平易实现,但抗倾覆能力较差;四支撑和六支撑虽然有较强的抗倾覆能力,但存在静不定问题,易导致“虚腿”,静不定次数越高,系统越复杂,支撑腿受力的不确定性和多解性也会导致调平算法复杂且难以实现[13~15]。本文采用四点式菱形支撑,即支撑点按菱形形状安置,既有四点式的稳定,也能承受成年人低于100 kg的重量,关键是可通过调平算法让4个支撑点同时参与调平,避免了“假支撑”现象的发生。
在自动调平过程中,由于中心点不动调平法的四个推杆升降总和最短,即所用时间最短,因此本文采用中心点不动的调平策略[16,17]。确定调平策略后选择位置式比例—积分—微分(proportional-integral-differential,PID)控制算法完成实际调平操作[18,19],即根据平台实际倾斜情况,发送对应的脉宽调制(pulse width modulation,PWM)波来控制电动推杆的上升、下降及移动速度等,PID算法示意图如图7。

图7 PID控制系统原理图
4 实验与结果分析
用自行设计的实验装置对自动调平系统进行实验与调试,工作流程如图8;实际现场及调平装置如图9所示;进行实验调试及调平具体数值见表2。

图8 工作流程图

图9 倾斜5°,10°,20°,30 °实验现场图
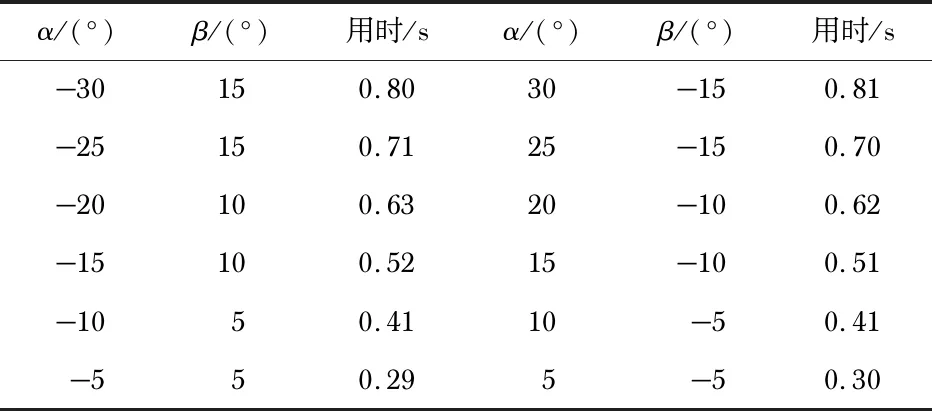
表2 调平具体数值及实验结果
实验现场按每次增加5°倾角间隔进行实验,逐渐从左后方向到右前方向转动反复进行,且以最长伸缩杆用时作为最终调平时间,由表2中12组数据可看出:两轴的复合角度越大,调平用时越长。
同时,在调平实验中,对电动轮椅车整体的稳定性性能也做了验证性实验,结果表明:4个推杆分别在11 cm上升范围内,调平装置均能通过调整支腿的长度完成0°~30°倾角间快速平稳的调平;撤去倾斜角度,恢复平衡状态。符合国家标准(GB/T 12996——2012)中电动轮椅车稳定性性能要求,完全可满足电动轮椅座位的实时自动调平工作。
5 结 论
本文是在对轮椅市场进行调查分析的情况下,提出了一种可用于电动轮椅的机电四点式菱形调平系统的自动调平装置,并进行了理论推导和应用实验装置的实际测试,验证了本装置可帮助轮椅在0°~30°的倾角之间实现高精度且平稳快速的调平,且完全符合国家标准电动轮椅车稳定性性能要求。
猜你喜欢
中国民间疗法(2021年5期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
数学小灵通·3-4年级(2020年3期)2020-06-24
新世纪智能(高一语文)(2019年10期)2020-01-13
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
森林工程(2018年4期)2018-08-04
天津诗人(2017年2期)2017-11-29
中国核电(2017年1期)2017-05-17
航天工业管理(2017年4期)2017-05-12
