RTG大车自动纠偏系统设计和纠偏策略
2021-04-30 21:22杨阳王宝磊韩佳琦
上海海事大学学报 2021年1期
杨阳 王宝磊 韩佳琦
摘要:
针对传统集装箱码头轮胎式龙门起重机(rubber-tyred gantry crane,RTG)大车在直线行驶过程中产生横向偏移的问题,提出一种RTG大车速度差自动纠偏方法。该方法通过磁尺传感器采集RTG大车横向偏移距离和偏移角,建立RTG大车横向偏移数学模型。基于最优控制理论构建运行性能指标函数,推导出最优控制矩阵的黎卡提方程并采用线性二次型最优控制方法求解。引入惯性、加减速、PLC延迟等干扰进行Simulink仿真,得到最终解。在现场调试中,PLC根据该代数解完成RTG大车行驶自动纠偏。研究结果表明:大车横向偏移距离保持在30 mm内,实际运行效果理想,达到RTG大车自动纠偏目的。
关键词:
轮胎式龙门起重机(RTG); 速度差自动纠偏; 最优控制理论; 黎卡提方程
中图分类号: U653.921; TP27
文献标志码: A
收稿日期: 2019-11-11
修回日期: 2020-08-19
基金项目:
国家自然科学基金(71701126)
作者简介:
杨阳(1983—),女,上海人,讲师,硕导,博士,研究方向为物流工程与管理, (E-mail)yyang@shmtu.edu.cn
Automatic deviation correction system design and
deviation correction strategy for RTG cart
YANG Yang, WANG Baolei, HAN Jiaqi
(Logistics Engineering College, Shanghai Maritime University, Shanghai 201306, China)
Abstract:
To solve the rubber-tyred gantry crane (RTG) cart transverse deviation problem in the straight-line driving, a method of automatic deviation correction for RTG cart velocity difference is proposed. Based on the data of transverse deviation displacement and deviation angle collected by the magnetic ruler sensor, the mathematical model of the RTG cart transverse deviation is established. The operational performance index function is constructed based on the optimal control theory, and the Riccati equation of the optimal control matrix is derived and solved by the linear quadratic optimal control method. The Simulink simulation is carried out to obtain the final solution, where the interference of inertia, acceleration, deceleration and PLC delay is introduced. In the field experiment, the PLC automatically corrected the RTG cart travelling deviation according to the algebraic solution. The results show the RTG cart transverse deviation displacement is kept within 30 mm, the actual operation effect is ideal, and the purpose of automatic deviation correction is achieved.
Key words:
rubber-tyred gantry crane (RTG); automatic deviation correction for velocity difference; optimal control theory; Riccati equation
0 引 言
輪胎式龙门起重机(rubber-tyred gantry crane, RTG)是目前国内集装箱码头堆场搬运、装卸、堆垛等作业的专用机械。相比于轨道式龙门起重机(rail-mounted gantry crane, RMG),RTG的机动性较好、通用性较强,可以进行跨箱区作业。
由于RTG没有轨道约束,偏斜行驶会产生剐箱、撞箱等问题,甚至造成严重的损失。
为实现码头自动化转型升级,对RTG的自动化改造的关键就是解决RTG大车自动纠偏问题。本文对RTG进行纠偏系统设计和纠偏策略研究。
针对起重机大车行驶的自动纠偏改造,国内学者提出了不同的技术方案:闫德鑫等[1]利用GPS定位计算当前RTG大车的偏移距离,并根据偏移距离推算纠偏控制量,但是纠偏效果欠佳。图像识别法[2]通过在RTG大车直线行进方向上画参考线,利用图像识别器判定当前大车是否跑偏,但该方法未考虑纠偏系统的干扰、延迟等因素,而且图像处理易受天气影响。激光纠偏法[3]以堆场上的集装箱侧面之间的距离作为参考,判定大车是否跑偏,但是该方法未公开其纠偏控制系统的设计,无法判断纠偏效果。超声波法[4]利用超声波传感器测量RTG大车与参照物之间的距离,根据该测量距离与预设距离的比较结果发送不同的控制信号,但该方法同样未公开具体的纠偏控制系统,无法比较其纠偏误差范围。王科等[5]采用电控罗经与激光距离传感器相结合的纠偏方法,建立了基于航向角和激光偏差值的纠偏模型来规避RTG大车轮胎压力造成的影响,实现在RTG大车作业过程中对偏离方向的超前预测,并增加偏差补偿,将纠偏误差控制在200 mm以内。洪辉等[6]基于RTG大车轮胎的速度差,单方面调整海侧或陆侧大车行驶速度,也可以同时对不同侧的大车进行不同的处理提高纠偏效率。其中,GPS纠偏系统控制器负责纠偏方向和纠偏量的计算任务,PLC和变频器仍然负责逻辑判断和数据传输。高强生等[7]认为PLC在RTG大车纠偏控制环节既能计算偏移量,又能对大车行驶状态进行动态实时调整。王吉明[8]考虑电气系统的安全性、稳定性和性价比,采用PLC实现了对造船龙门起重机的电气系统的具体控制。
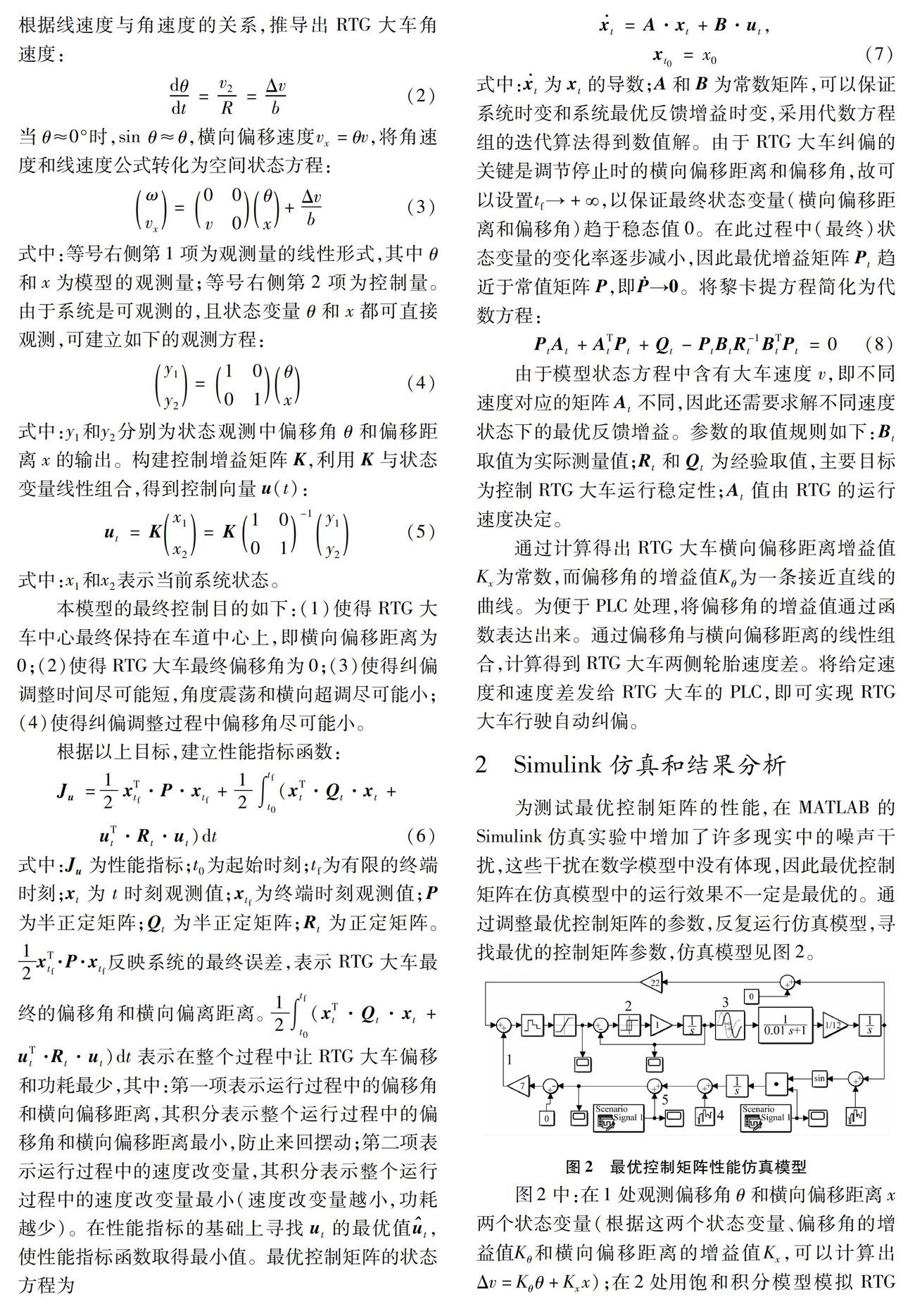
第二次RTG大车仿真实验设置:大车运行速度为2 m/s,初始偏移角为0,初始横向偏移距离为-0.1 m;大车的横向偏
移距离x的增益值Kx=6.4,偏移角θ的增益值Kθ为6.282v+19.87。实验目标是将其调整到中心处。由图4可知,在15s左右时纠偏完成,此后RTG大车的横向偏移距离在-0.01m到0.01 m之间振荡,这表明本模型可以对横向偏移进行纠正。
第三次仿真实验将RTG大车横向偏移距离x的增益值Kx调整为3.2,其他参数与第二次仿真实验的相同,仿真运行结果见图5。
对比第二次与第三次仿真实验:在第二次实验中RTG大车经过15 s左右进入稳定状态;在第三次实验中RTG大车经过30 s左右进入稳定状态,但第三
次实验中RTG大车横向偏移距离的振荡幅度比第二次实验的略低。这说明第二次仿真实验采用计算出的最优增益矩阵并不能达到最优目的。这是因为最优增益矩阵是在理想的数学模型下求得的,而仿真模型中引入了大量的干扰,如惯性、加减速、PLC延迟等。通过调整最优增益矩阵的值,可以减小振荡幅度,但会引入延迟,因此在现场测试中可通过调整最优增益矩阵使延迟时间和振荡幅度都在可接受的范围内。
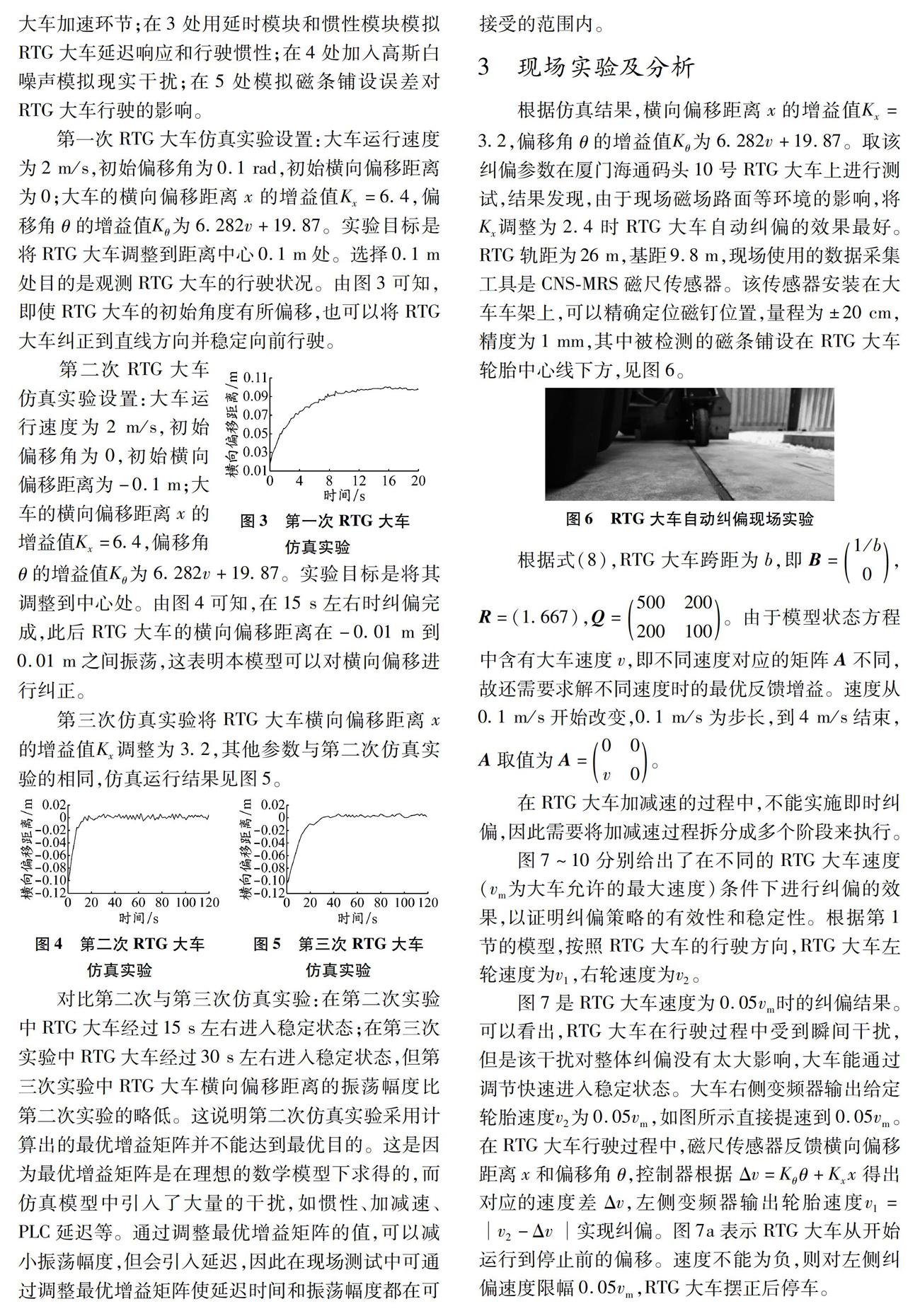
3 现场实验及分析
根据仿真结果,横向偏移距离x的增益值Kx=3.2,偏移角θ的增益值Kθ为6.282v+19.87。取该纠偏参数在厦门海通码头10号RTG大车上进行测试,结果发现,由于现场磁场路面等环境的影响,将Kx调整为2.4时RTG大车自动纠偏的效果最好。RTG轨距为26 m,基距9.8 m,现场使用的数据采集工具是CNS-MRS磁尺传感器。该传感器安装在大车车架上,可以精确定位磁钉位置,量程为±20 cm,精度为1 mm,其中被检测的磁条铺设在RTG大车轮胎中心线下方,见图6。
根据式(8),RTG大车跨距
为b,即
在RTG大车加减速的过程中,不能实施即时纠偏,因此需要将加减速过程拆分成多个阶段来执行。
圖7~10分别给出了在不同的RTG大车速度(vm为大车允许的最大速度)条件下进行纠偏的效果,以证明纠偏策略的有效性和稳定性。根据第1节的模型,按照RTG大车的行驶方向,RTG大车左轮速度为v1,右轮速度为v2。
图7是RTG大车速度为0.05vm时的纠偏结果。可以看出,RTG大车在行驶过程中受到瞬间干扰,但是该干扰对整体纠偏没有太大影响,大车能通过调节快速进入稳定状态。大车右侧变频器输出给定轮胎速度v2为0.05vm,如图所示直接提速到0.05vm。在RTG大车行驶过程中,磁尺传感器反馈横向偏移距离x和偏移角θ,控制器根据Δv=Kθθ+Kxx得出对应的速度差Δv,左侧变频器输出轮胎速度v1=∣v2-Δv∣实现纠偏。图7a表示RTG大车从开始运行到停止前的偏移。速度不能为负,则对左侧纠偏速度限幅0.05vm,RTG大车摆正后停车。
图8是RTG大车速度为0.5vm时的纠偏结果。图8显示,RTG大车能保证在位置偏移30 mm以内稳定运行,而不再偏移过大。在RTG大车加减速过程中,将给定速度拆分为多阶段给定,实现该过程RTG大车的纠偏控制。
图9是RTG大车速度为0.7vm时的纠偏结果。图10是RTG大车速度为vm时的纠偏结果。图10为了测试大车急停的稳定性,采用直接停车,最后RTG大车位置偏差在10 mm以内。
分析上述几次实验可知,智能纠偏策略对RTG大车运行无速度要求,即只要速度在0.05vm~vm范围内都可实现稳定纠偏。本纠偏策略对RTG大车行驶进行全自动纠偏,大车行驶纠偏有效,纠偏效果显著,可以投入现场作业使用。进入稳态后,位置偏差在30 mm内波动,大车中心位置在0位波动。纠偏策略的特点有:进入稳定状态后,
不会再有大角度偏移;只要RTG大车速度在0.05vm~vm范围内均能实现稳定纠偏;抗干扰能力强。
4 结 论
针对轮胎式龙门起重机(RTG)在直线行驶过程中的偏移问题,采用磁尺传感器对环境进行检测,建立了RTG大车横向偏移数学模型。该模型是关于横向偏移距离和偏移角的线性微分空间状态方程。提出一种利用最优控制理论实现RTG大车自动纠偏的方法,使得RTG大车能够实现自动纠偏。
实验结果表明:本文所设计的纠偏控制系统运行效果良好,可以将RTG大车控制到轨道中心线的位置,且位置偏移可以控制在30 mm以内,抗干扰能力强。本文提出的智能纠偏策略可以应用于传统码头的自动化改造,既能减少码头改造成本,又能避免人工纠偏精度低的问题,提高RTG大车运行的安全性。
参考文献:
[1]闫德鑫, 李俊, 潘金贵. GPS在轮胎吊自动驾驶中的应用[J]. 计算机工程与应用, 2005, 41(33): 206-210. DOI: 10.3321/j.issn:1002-8331.2005.33.063.
[2]南通通镭软件有限公司, 上海冠东国际集装箱码头有限公司. 集装箱龙门吊位置图像识别与定位纠偏系统: 201020106135.3[P]. 2011-06-29[2019-11-11].
[3]上海海镭激光科技有限公司. 轮胎吊行走定位纠偏及防撞的系统: 201420312741.9[P]. 2014-12-10[2019-11-11].
[4]青岛港(集团)有限公司. 一种轮胎式集装箱龙门起重机的纠偏方法: 200710015431.5[P]. 2007-09-19[2019-11-11].
[5]王科, 张福雷, 严彩忠, 等. 基于电控罗经的轮胎式龙门起重机全自动纠偏方法[J]. 工业控制计算机, 2019, 32(1): 17-22.
[6]洪辉, 蒋旻. GPS技术在轮胎式龙门吊自动纠偏中的应用[J]. 集装箱化, 2013, 24(2): 22-26.
[7]高强生, 王曼. 浅析PLC控制器在起重机自动纠偏系统中的作用[J]. 数控技术, 2016(10): 13-13. DOI: 10.19695/j.cnki.cn12-1369.2016.10.008.
[8]王吉明. 造船龙门起重机电气控制系统的设计与应用[D]. 上海: 华东理工大学, 2011.
(编辑 贾裙平)
猜你喜欢
集装箱化(2021年5期)2021-08-03
中国电气工程学报(2020年12期)2020-10-27
小小说大世界(2017年12期)2017-12-26
设计(2017年13期)2017-10-31
棋艺(2016年6期)2016-11-14
企业文明(2016年8期)2016-05-14
智能制造(2015年8期)2015-10-15
读者·校园版(2015年3期)2015-05-14
意林(2014年22期)2014-05-14
知识窗(2011年7期)2011-05-14