结合速度和干扰观测的船舶路径跟踪模型预测控制
2021-04-30 03:47李宗宣卜仁祥范艺
上海海事大学学报 2021年1期
李宗宣 卜仁祥 范艺

摘要:
针对船舶路径跟踪控制中的舵角需优化﹑舵幅和舵速受约束等问题,提出模型预测控制(model predictive control, MPC)算法。为处理系统高阶状态值不易测量以及环境干扰问题,设计高阶非线性观测器,同时对船速和包含模型不确定项和外界干扰的总未知项进行估计。以引入舵机响应系统的MMG模型作为预测模型,不仅能提高预测精度,而且更符合船舶运动控制的实际情况。仿真结果表明,所设计的控制器在风浪流时变干扰下仍能跟踪参考路径,舵角幅值小且其变化是光滑的,速度值和总未知项也均能被准确地逼近,验证了所提算法的有效性。
关键词:
船舶运动控制; 模型预测控制(MPC); 路径跟踪; 非线性观测器
中图分类号: U664.82
文献标志码: A
Model predictive control of ship path following combined
with velocity and disturbance observers
LI Zongxuan, BU Renxiang, FAN Yi
(Navigation College, Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract:
To solve the rudder angel optimization requirement, rudder amplitude constraint and rudder rate constraint in the ship path following control, a model predictive control (MPC) algorithm is proposed. To deal with the problem of high-order state values of the system being not easy to measure and environmental
disturbance, a high-order nonlinear observer is designed to estimate the ship velocity and the total unknown terms including model uncertainties and external disturbance. The MMG model with the rudder response system is used as the predictive model, which not only can improve the prediction accuracy, but also accords with the actual situation of ship motion control. The simulation results show that: the designed controller can follow the desired path under the time-varying disturbance of wind, wave and current; the rudder angle amplitude is small and its variation is smooth, and the velocity value and the total unknown terms can be accurately approximated, which verifies the effectiveness of the proposed algorithm.
Key words:
ship motion control; model predictive control (MPC); path following; nonlinear observer
收稿日期: 2020-03-19
修回日期: 2020-05-09
基金項目:
国家自然科学基金(51939001,61976033,51379026);辽宁省自然科学基金(20170540089)
作者简介:
李宗宣(1996—),男,陕西眉县人,硕士研究生,研究方向为船舶运动控制、模型预测控制,(E-mail)zongxuanli@126.com;
卜仁祥(1973—),男,辽宁岫岩人,副教授,二副,博士,研究方向为船舶运动控制、船舶非线性控制,
(E-mail)burenxiang@dlmu.edu.cn
0 引 言
欠驱动船舶路径跟踪是一个不考虑时间限制的控制领域问题[1]。为解决此问题,FOSSEN将视觉制导算法应用到船舶路径跟踪中[2],使船舶在实际可行的情况下实现参考路径跟踪。由于船速不易被直接测量,文献[3]利用高增益状态观测器对船舶横、纵向速度进行估计。文献[4]为估计船速设计出线性观测器,但线性观测器对较小偏差的估计精度较低,而在估计较大偏差时系统会产生振荡。为此,文献[5]提出非线性增益速度观测器。文献[6]不仅利用状态观测器估计船速,而且设计扰动观测器对外界干扰进行逼近。文献[7]设计高增益状态观测器,对运动学中的时变干扰进行逼近。文献[8]将以扩张状态观测器(extended state observer, ESO)为核心的自抗扰算法应用到路径跟踪中,减小外界干扰的影响。文献[9]将ESO应用于船舶航向控制,解决模型不确定项和外界干扰问题。文献[10]利用径向基函数(radial basis function, RBF)神经网络对模型不确定项进行逼近。文献[11]结合RBF神经网络设计滑模控制器,提高了对外界干扰的鲁棒性。文献[12]也基于RBF神经网络设计自适应控制器,解决路径跟踪中存在的模型不确定项和外界干扰问题。文献[13-14]设计出一种比RBF神经网络运算量更小的最小学习参数神经网络方法,可以有效地对未知部分或外界干扰进行逼近。除以上路径跟踪中存在的问题之外,对控制输入的约束与优化也是不可忽视的,其直接关系到输入机构能否正常运行以及能量损耗大小的问题。为解决输入约束问题:文献[15]在控制律中引入辅助系统;文献[16]设计增量反馈滑模控制器,利用迭代滑模中的非线性函数避免输入舵角饱和问题;文献[17]利用在处理约束问题上具有独特优势的模型预测控制(model predictive control, MPC)算法,解决输入幅值和增量约束的问题,但其所采用的线性预测模型在较大外界干扰下控制精度较低;文献[18]以非线性Nomoto模型作为MPC模型,但与实际船舶运动特性相比,其精度仍较低。鉴于此,文献[19]采用船舶MMG模型作为预测模型,并通过RBF神经网络技术对模型中的干扰项进行逼近,提高了预测精度。然而,MPC算法中的每一步运算均需基于当前系统状态值的反馈,而系统高阶状态值一般难以被直接测量。
参考以上研究成果,本文考虑船舶运动控制的实际情况和控制机构存在的延时问题,将引入了舵机响应系统的高精度船舶MMG模型作为MPC模型,并设计高阶非线性观测器,同时对船速、模型不确定项和外界干扰进行逼近。
1 船舶模型与控制目标
1.1 MMG模型
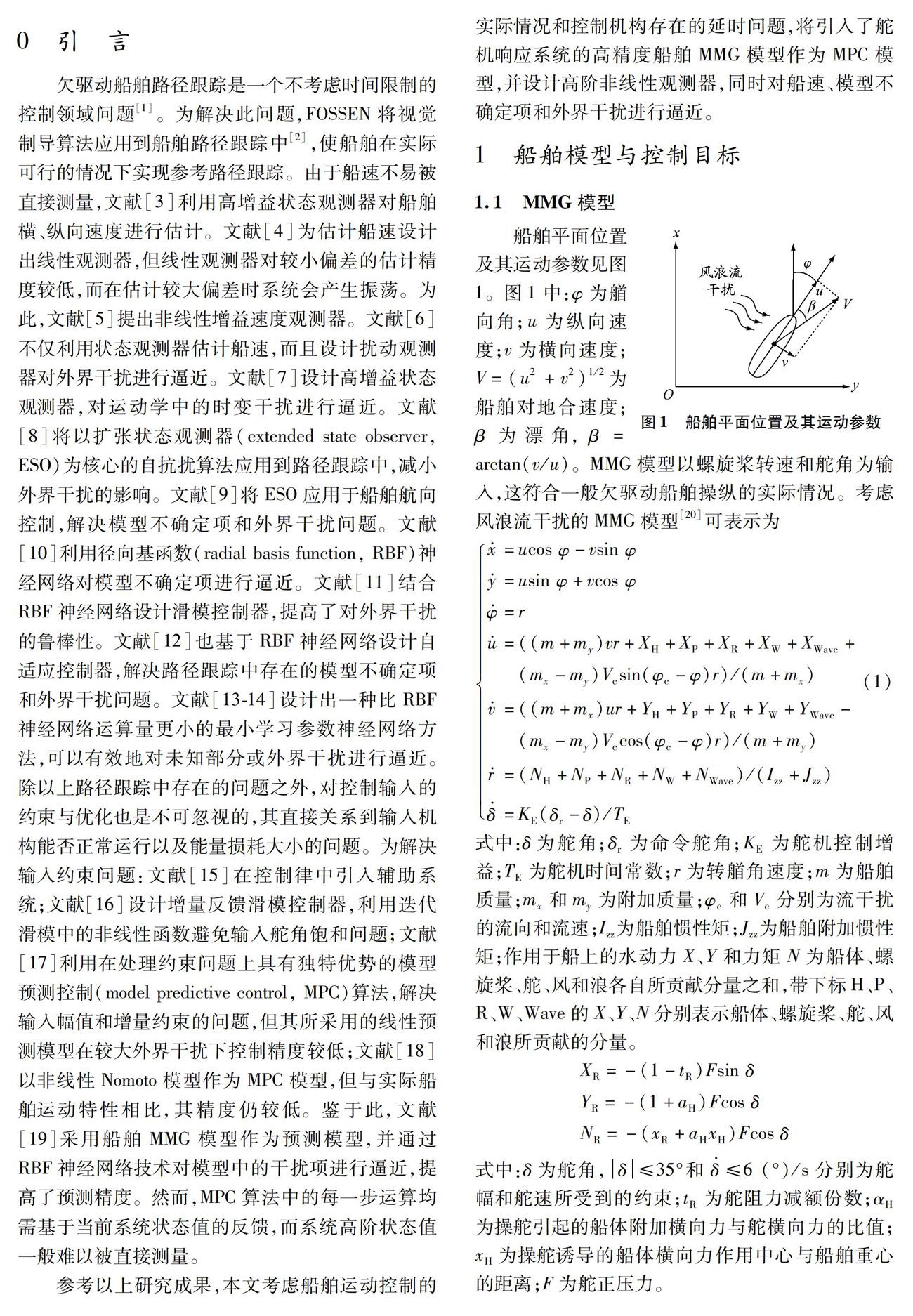
船舶平面位置及其运动参数见图1。
图1中:φ为艏向角;u为纵向速度;v为横向速度;V=(u2+v2)1/2为船舶对地合速度;β为漂角,β=arctan(v/u)。MMG模型以螺旋桨转速和舵角为输入,这符合一般欠驱动船舶操纵的实际情况。考虑风浪流干扰的MMG模型[20]可表示为
式中:δ為舵角;δr为命令舵角;KE为舵机控制增益;TE为舵机时间常数;r为转艏角速度;m为船舶质量;mx和my为附加质量;φc和Vc分别为流干扰的流向和流速;Izz为船舶惯性矩;Jzz为船舶附加惯性矩;作用于船上的水动力X、Y和力矩N为船体、螺旋桨、舵、风和浪各自所贡献分量之和,带下标
H、P、R、W、Wave的X、Y、N分别表示船体、螺旋桨、舵、风和浪所贡献的分量。
式中:δ为舵角,δ≤35°和
δ·≤6 (°)/s分别为舵幅和舵速所受到的约束;tR为舵阻力减额份数;αH为操舵引起的船体附加横向力与舵横向力的比值;xH为操舵诱导的船体横向力作用中心与船舶重心的距离;F为舵正压力。
1.2 控制目标
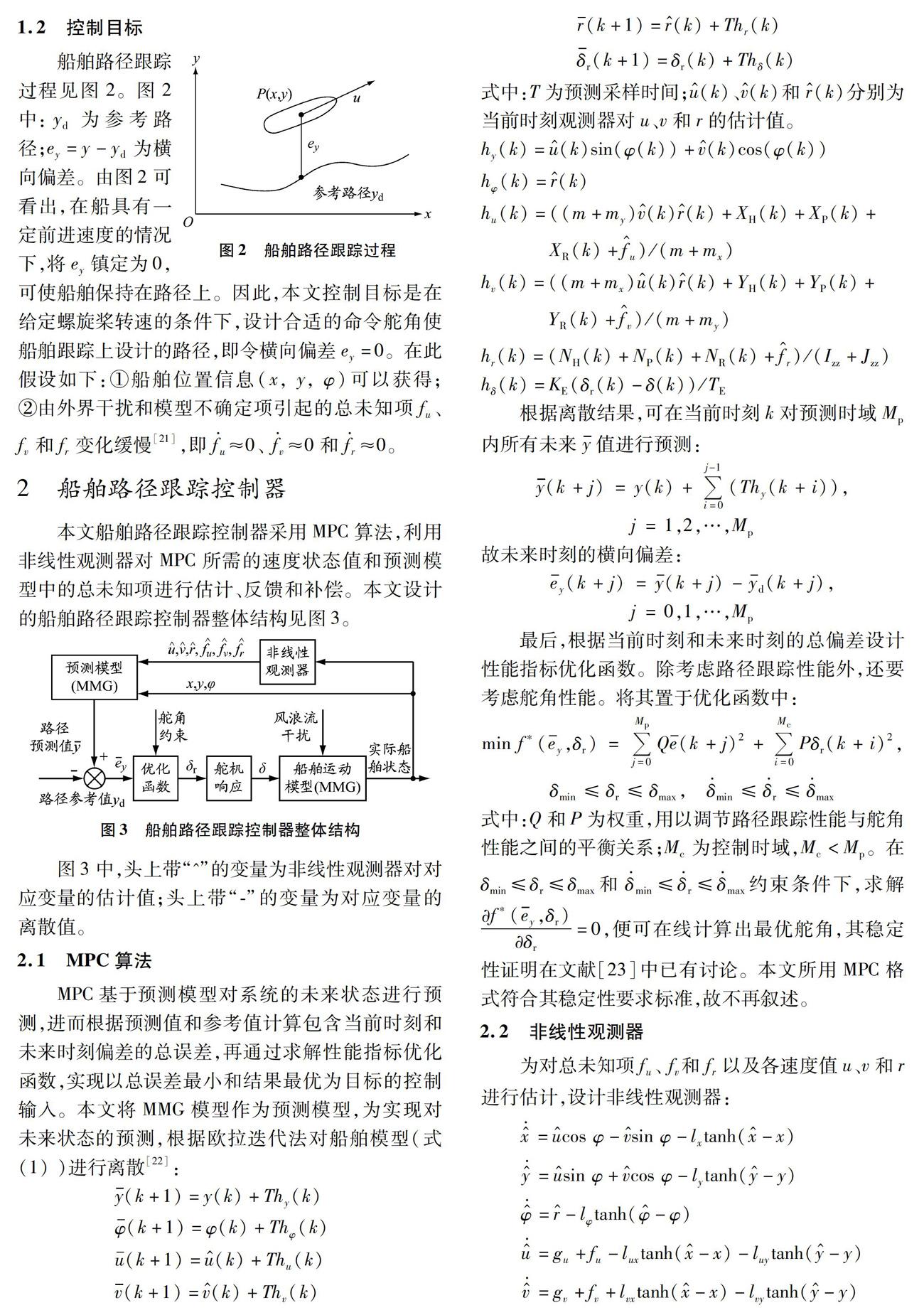
船舶路径跟踪过程见图2。
图2中:yd为参考路径;ey=y-yd为横向偏差。由图2可看出,在船具有一定前进速度的情况下,将ey镇定为0,可使船舶保持在路径上。因此,本文控制目标是在给定螺旋桨转速的条件下,设计合适的命令舵角使船舶跟踪上设计的路径,即令横向偏差ey =0。在此假设如下:
①船舶位置信息(x, y, φ)可以获得;②由外界干扰和模型不确定项引起的总未知项fu、 fv和fr变化缓慢[21],即
2 船舶路径跟踪控制器
本文船舶路径跟踪控制器采用MPC算法,利用非线性观测器对MPC所需的速度状态值和预测模型中的总未知项进行估计、反馈和补偿。本文设计的船舶路径跟踪控制器整体结构见图3。
图3中,头上带“^”的变量为非线性观测器对对应变量的估计值;头上带“-”的变量为对应变量的离散值。
2.1 MPC算法
MPC基于预测模型对系统的未来状态进行预测,进而根据预测值和参考值计算包含当前时刻和未来时刻偏差的总误差,再通过求解性能指标优化函数,实现以总误差最小和结果最优为目标的控制输入。本文将MMG模型作为预测模型,为实现对未来状态的预测,根据欧拉迭代法对船舶模型(式 (1) )进行离散[22]:
式中:T为预测采样时间;u^(k)、
v^(k)和r^(k)分别为当前时刻观测器对u、v和r的估计值。
根据离散结果,可在当前时刻k对预测时域Mp内所有未来
y值进行预测:
最后,根据当前时刻和未来时刻的总偏差设计性能指标优化函数。除考虑路径跟踪性能外,还要考虑舵角性能。将其置于优化函数中:
式中:Q和P为权重,用以调节路径跟踪性能与舵角性能之间的平衡关系;Mc为控制时域,Mc δ·min≤ δ·r≤ δ·max 约束条件下,求解 f*(ey,δr)δr=0,便可在线计算出最优舵角,其稳定性证明在文献[23]中已有讨论。本文所用MPC格式符合其稳定性要求标准,故不再叙述。 2.2 非线性观测器 为对总未知项fu、 fv 和 fr以及各速度值u、v和r进行估计,设计非线性观测器: 式中:带不同下标的l为正的参数;gu、gv和gr为模型已知部分。考虑假设②,计算观测器估计误差如下: 式中:A~= A^-A(其中A分别代表式中的x、y、φ、u、v、r、fu、 fv和fr)为各状态逼近误差。选择Lyapunov函数如下: 式中:χ、η、μ、λ和γ为正系数。对V求导得到 因为位移的数量级比速度和加速度的数量级高,所以当参数lx和ly的值比其他参数值大时,z1和z2括号部分的正负分别取决于 x~和y~,故有z1≤0和z2≤0。由式(2)可知,u~和v~分别与 x~和y~呈反比例关系,故通过调节参数lux与luy、lvx与lvy、lfux与lfuy、lfvx与lfvy之间的比例大小,可调节x~与y~不同正负号时的反馈量大小。当x~或y~小于0时,u~或v~将增加至大于0,此时有z3≤0和z4≤0;当x~或y~大于0时,u~或v~将减小至小于0,仍有z3≤0和z4≤0。因此,存在很小的正数σ,满足z3+z4≤σ,则有 对于r和fr的分析与上述过程类似,故不再详述。综上,所设计的观测器可实现对速度和总未知项的逼近。 3 仿真分析 3.1 仿真数据 通过仿真实验对MPC算法的有效性进行验证。仿真船舶参数[19]:满载吃水8 m,满载排水14 635 t,船长126 m,船宽20.8 m,给定螺旋桨转速100 r/min。以MMG模型(式(1))作为仿真模型,其中风干扰力XW、YW和力矩NW的计算式[24]如下: 式中:ρa为空气密度;αr为相对风向角;Ur为相对风速;Af和As分别为水线以上的正投影面积和侧投影面积;L为船舶总长;CW,X(αr)、CW,Y(αr)和CW,N(αr)分别为风压力(矩)系数。 浪干扰力XWave、YWave和力矩NWave的计算式[25]如下: 式中:λ′为浪波长;χ′为波浪遭遇角;ρ为海水密度;α为波幅;CWave,X(λ)、CWave,Y(λ)和CWave,N(λ)分别为波浪漂移力(矩)系数。 3.2 仿真结果 直线跟踪:在此将本文设计的控制器(采用结合观测器的MPC算法)与文献[19]设计的控制器(采用结合RBF神经网络的MPC算法)做对比仿真,仿真结果分别用下标obs和RBF区分;在MATLAB Simulink环境下进行仿真,仿真时间为1 200 s;船舶初始位置(x0, y0, φ0)=(0, 200 m, 0),系统初始状态(u0, v0, r0)=(7.2 m/s, 0, 0),参考路径yd=0。外界干扰:风速10 m/s,风向20°sin(0.02t)+45°;流速1 m/s,流向5°sin(0.005t)+ 45°;波浪遭遇角 φ+135°-20°sin(0.02t),浪波长83 m。控制参数: 图4中,由于受到时变干扰的影响,yobs和yRBF在稳定后均有小范围的波动,但波动值小于船宽的10%,这符合实际航行的要求,因此可认为这两种控制器均能有效解决环境干扰问题,使船准确地跟踪上参考路径。图5中,由于时变干扰,艏向角和舵角都有一定的波动,以抵抗扰动,而δobs和δRBF的幅值均在约束范围内,并且光滑无抖振,说明MPC方法具有解决舵幅约束问题的能力。图6展示了本文设计的控制器在处理舵速约束上的有效性,舵速始终在5 (°)/s以内。图7和图8分别描述了利用本文设计的控制器對u、v、r以及3个总未知项 fu、 fv和fr的逼近结果,其中各速度值在5~10 s内便可被准确估计出,总未知项在20 s左右可被逼近。以上结果说明,本文所提方法不仅在路径跟踪、外界干扰处理和舵角约束上可以达到与文献[19]所用方法相同的效果,而且无须测量速度,避免了系统高阶状态值不易被测量的问题。 曲线跟踪:为验证本文设计的控制器对曲线路径跟踪也有效,选取正弦参考路径yd=200×sin(0.000 35πx)进行仿真实验;船舶初始位置(x0, y0, φ0)=(0, 0, 0),系统初始状态(u0, v0, r0)=(7.2 m/s, 0, 0)。外界干扰:风向30°sin(0.01t)+45°,流向10°sin(0.005t)+45°,其余参数与直线跟踪相同。 从图9可以看出,本文设计的控制器在时变干扰下,仍能使船跟踪上参考曲线路径,说明本文设计的控制器具有曲线跟踪能力。图10展示 了利用本文设计的控制器对舵角和舵速约束的结果:由于时变干扰影响,再加上正弦跟踪需要一直转变航向,所以舵角也需要一直变化,但波动幅值小于10°,并且光滑;舵速也在约束范围内。 4 结束语 为解决船舶路径跟踪中舵角需优化﹑舵幅和舵速受约束等问题,本文提出以引入舵机响应系统的船舶MMG模型为预测模型的MPC算法,并构建非线性观测器,同时对干扰和速度进行逼近。仿真结果表明,所设计的控制器使船在风浪流时变干扰下仍能准确地跟踪上参考路径。此外舵幅和舵速均在限制值内,舵角幅值小且光滑,这可减小船舶航行中的舵机能量消耗,而且各速度值和3个总未知项均可被观测器成功地逼近,验证了控制器的有效性。下一步将在观测器调参和航迹跟踪(考虑速度问题,即对x和y均进行控制)方面继续进行研究。 参考文献: [1]WANLei, ZENG Jiangfeng, LI Yueming,et al. Neural observer-based path following control for underactuated unmanned surface vessels with input saturation and time-varying disturbance[J].International Journal of Advanced Robotic Systems, 2019, 16(5): 1-17. DOI: 10.1177/1729881419878071. [2]NAGAIT, WATANABE R. Applying position prediction model for path following of ship on curved path[C]//Proceedings of the 2016 IEEE Region 10 Conference, TENCON 2016. Institute of Electrical and Electronics Engineers Inc.,2017: 3675-3678. DOI: 10.1109/TENCON.2016.7848743. [3]WANGYuanhui, TONG Haiyan, WANG Chenglong. High-gain observer-based line-of-sight guidance for adaptive neural path following control of underactuated marine surface vessels[J]. IEEE Access, 2019, 7: 19258-19265. [4]PADIDEHR, KHOSHNAM S, ABBAS C. Output feedback look-ahead position control of electrically driven fast surface vessels[J]. Automatika, 2016, 57(4): 968-981. DOI: 10.7305/automatika.2017.12.1485. [5]沈智鹏, 毕艳楠, 郭坦坦, 等. 带非线性观测器的欠驱动船舶自适应动态面输出反馈轨迹跟踪控制[J]. 系统工程与电子技术, 2019, 41(2): 409-416. DOI: 10.3969/j.issn.1001-506X.2019.02.24. [6]丁福光, 马燕芹, 王元慧, 等. 基于状态观测器的多艘船舶鲁棒同步控制[J]. 哈尔滨工程大学学报, 2015, 36(6): 789-794. DOI: 10.3969/j.issn.1006-7043.201404001. [7]WANGJianqin, ZOU Zaojian, WANG Tao. High-gain extended state observer based adaptive sliding mode path following control for an underactuated vessel sailing in restricted waters[J]. Applied Scinces, 2019, 9(6): 1102. DOI: 10.3390/app9061102. [8]HUANGHongyun, FAN Yunsheng. Path following control for under-actuated surface vessel with disturbance[C]//第30届中国控制与决策会议论文集. 中国自动化学会信息物理系统控制与决策专业委员会, 2018: 3265-3269. [9]李荣辉, 曹峻海, 李铁山. 波浪作用下船舶航向自抗扰控制设计及参数配置[J]. 控制理论与应用, 2018, 35(11): 1601-1609. DOI: 10.7641/CTA.2018.80319. [10]沈智鵬, 张晓玲, 张宁, 等. 基于神经网络观测器的船舶轨迹跟踪递归滑模动态面输出反馈控制[J]. 控制理论与应用, 2018, 35(8): 1092-1100. DOI: 10.7641/CTA.2018.70456. [11]张贺, 姚杰, 隋江华, 等. 基于DSC的欠驱动船舶路径跟踪神经滑模控制[J]. 船舶工程, 2019, 41(10): 85-91. DOI: 10.13788/j.cnki.cbgc.2019.10.18. [12]FANYunsheng, HUANG Hongyun, TAN Yuanyuan. Robust adaptive path following control of an unmanned surface vessel subject to input saturation and uncertainties[J]. Applied Scinces, 2019, 9(9): 1815. DOI: 10.3390/app9091815. [13]QIUBingbing, WANG Guofeng, FAN Yunsheng,et al. Adaptive sliding mode trajectory tracking control for unmanned surface vehicle with modeling uncertainties and input saturation[J]. Applied Sciences, 2019, 9(6): 1240. DOI: 10.3390/app9061240. [14]MUDongdong, WANG Guofeng, FAN Yunsheng,et al. Adaptive trajectory tracking control for under-actuated unmanned surface vehicle subject to unknown dynamics and time-varing disturbances[J]. Applied Sciences, 2018, 8(4): 547. DOI: 10.3390/app8040547. [15]YUYalei, GUO Chen, YU Haomiao. Finite-time predictor line-of-sight based adaptive neural network path following for unmanned surface vessels with unknown dynamics and input saturation[J]. International Journal of Advanced Robotic System, 2018, 15(6): 1-14. DOI: 10.1177/172988141881 4699. [16]LIUYong, BU Renxiang, GAO Xiaori. Ship trajectory tracking control system design based on sliding model control algorithm[J]. Polish Maritime Research, 2018, 25(3): 26-34. [17]柳晨光, 初秀民, 王乐, 等. 欠驱动水面船舶的轨迹跟踪模型预测控制器[J]. 上海交通大学学报, 2015, 49(12): 1842-1854. DOI: 10.16183/j.cnki.jsjtu.2015.12.015. [18]LIUChenguang, ZHENG Huarong, NEGENBORN R,et al. Adaptive predictive path following control based on least squares support vector machines for underactuated autonomous vessels[J]. Asian Journal of Control, 2019: 2208. DOI: 10.1002/asjc.2208. [19]李荣辉, 陈志娟, 李宗宣, 等. 基于欧拉迭代模型预测的欠驱动水面船舶路径跟踪控制[J]. 广东海洋大学学报, 2020, 40(1): 106-112. DOI: 10.3969/j. issn.1673-9159.2020.01.014. [20]ZHANGWei, ZOU Zaojian, DENG Deheng. A study on prediction of ship maneuvering in regular waves[J]. Ocean Engineering, 2017, 137: 367-381. DOI: 10.1016/j.oceaneng.2017.03.046. [21]LIUZhiquan. Pre-filtered backstepping control for underactuated ship path following[J]. Polish Maritime Research, 2019, 26(2): 68-75. DOI: 10.2478/pomr-2019-0026. [22]DEALCANTARA ANDRADE F A, HOVENBURG A R, DE LIMA L N,et al. Autonomous unmanned aerial vehicles in search and rescue missions using real-time cooperative model predictive control[J]. Sensors, 2019, 19(19):1-22. DOI: 10.3390/s19194067. [23]MARJANOVICO, LENNOX B. Infinite horizon model predictive control with no terminal constraint[J]. Computers & Chemical Engineering, 2004, 28(12): 2601-2610. DOI: 10.1016/j. compchemeng. 2004.07.005. [24]LIZongxuan, LI Ronghui, BU Renxiang. Path following of under-actuated ships based on model predictive control with state observer [J]. Journal of Marine Science and Technology, 2020, 4: 1-11. DOI: 10.1007/s00773-020-00746-1. [25]李宗宣, 卜仁祥, 章沪淦. 结合改进RBF与虚拟圆弧的船舶路徑滑模控制[J]. 西北工业大学学报, 2021, 39(1): 216-223. DOI: 10.1051/jnwpu/20213910216. (编辑 赵勉)
猜你喜欢
中国自行车(2022年3期)2022-06-30
速读·下旬(2021年11期)2021-10-12
科学与财富(2021年35期)2021-05-10
当代化工(2020年4期)2020-08-24
大东方(2019年12期)2019-10-20
智富时代(2019年3期)2019-04-30
智富时代(2019年3期)2019-04-30
网络空间安全(2019年8期)2019-03-18
伙伴(2018年1期)2018-05-14
科学与财富(2017年22期)2017-09-10