一种天然气智慧站场泄漏检测方法
2021-05-06 01:06钱济人
云南化工 2021年2期
丁 楠,陈 浩,童 歆,钱济人
(1.浙江浙能天然气运行有限公司,浙江 杭州 310000;2.浙江浙能天然气管网有限公司,浙江 杭州 310051;3.浙江大学,浙江 杭州 310058)
随着天然气管道规模化建设和互联网+、大数据、云计算等新一代信息技术的迅速发展,巡检机器人成为管道企业推行智慧站场的重要手段。机器人现场检漏可有效保障人员安全、提高人力资源利用率,很多管道企业正在积极探索使用[1-3]。巡检机器人具备图像识别、红外热成像、气体状态检测等功能,能够在工业环境下完成生产运行的监控、工况风险识别等工作[4]。现有的天然气泄漏的巡检应用中,并未对站场设备的风险进行全面的评价,对站场的风险没有整体考虑,巡检机器人的激光传感器的扫描路径没有针对性。此外,泄漏云团的大小和在空间的分布区域与各个设备区域的流量、温度、高度等生产数据密切相关,在激光巡检扫描的角度选择上没有考虑到各个设备区域的生产数据之间的差异,容易使激光传感器无法扫描到泄漏云团,造成漏检,从而存在安全隐患。针对上述问题,通过对管道完整性管理要求和人工智能技术调研,提出了一种基于风险评价和凸优化理论的天然气站场泄漏检测方法,为优化智慧站场智能巡检工作提供参考。
1 方法设计
基于风险评价和凸优化理论的天然气站场泄漏检测方法的示意图见图1。通过天然气站场生产缺陷数据建立天然气站场失效数据库,分别计算设备失效概率和失效后果,得出设备失效的风险值,建立天然气站场设备失效数据库,按照风险等级严重程度确定巡检机器人上的激光传感器的扫描频次。根据生产数据参数进行K-means聚类,确定不同设备泄漏云团的差异,确定约束条件,利用凸优化理论求解激光传感器扫描角度。最终实现巡检机器人对站场设备的精准泄漏检测。
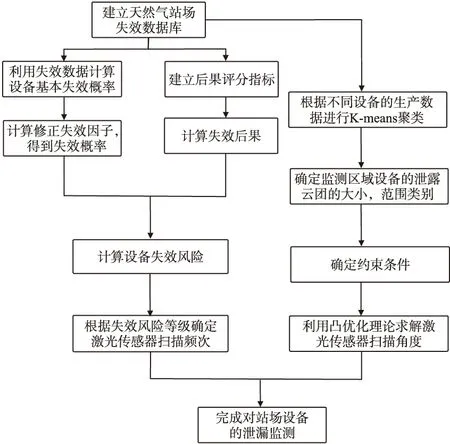
图1 基于风险评价和凸优化理论的天然气站场泄漏检测方法示意图
2 关键应用技术
2.1 搭载可调谐二极管激光吸收光谱技术测甲烷
可调谐二极管激光吸收光谱技术(TDLAS)[5-8],主要是通过改变可调谐半导体激光器的电流来控制激光器的谱线宽度,进而分辨单个或多个分子距离很近的吸收线;通过每个激光波长扫描的待测气体吸收峰都包含被测气体信息的吸收谱线,同时也排除了其他干扰气体的背景谱线。它的本质是利用被测气体对光波的选择吸收,从而产生吸收光谱的特性来对气体进行分析,具有高分辨率、高灵敏度等特点,在气体泄露检测方面应用广泛。搭载TDLAS激光传感器检测甲烷的浓度实质上是基于对甲烷气体特征吸收谱线的测量,工作原理见图2。
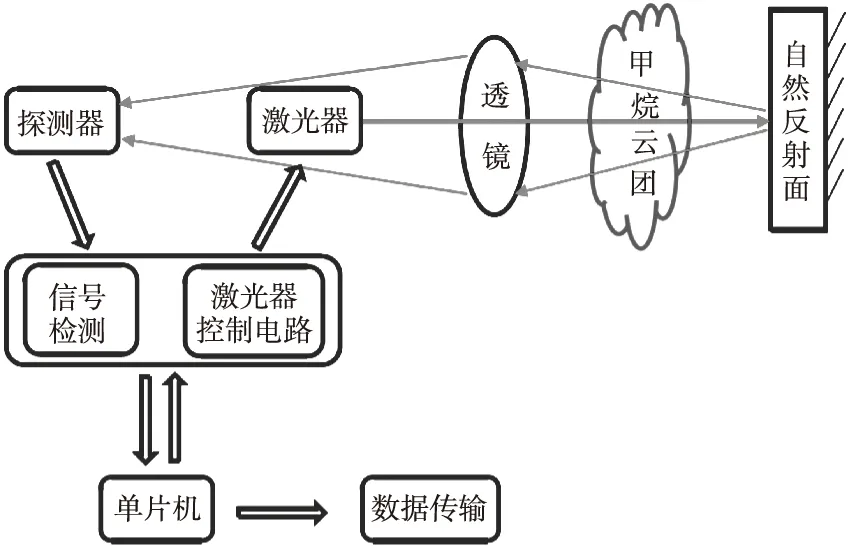
图2 TDLAS激光传感器的工作原理图
2.2 利用风险评价确定扫描频次
风险评价是以实现系统安全为目的,对系统中潜在的危害因素进行识别、分析,判断系统发生事故的可能性以及危害程度,为制定防范措施和安全管理决策提供科学依据的方法[9]。计算失效可能性与失效后果的乘积得到风险值,根据风险值划分风险等级,是常用的风险评价方法。
将ERP系统、安健环系统收集的天然气站场动设备的数据,主要包括工艺管道、阀门、分离器、清管器收发球筒、仪器仪表等缺陷,进行归类、分析、整理各类故障发生及处理的历史记录,建立天然气站场失效数据库。
根据天然气站场失效数据库对天然气站场各类设备进行风险评价,采用失效概率和失效后果两个维度的指标进行划分,具体包括以下步骤:
1)根据失效数据库进行风险评价,根据天然气站场失效数据库的失效数据获得由失效因素q引起的失效概率,将其作为基本失效概率Rq;通过失效概率修正因子Fq对基本失效概率Rq进行修正,计算得到评价天然气站场内设备由失效因素q引起的失效概率Pq;各个失效因素的失效概率相加,得到相应设备的失效概率P。
其中,Fq为失效因素q对应的失效概率修正因子,失效概率修正因子可以考虑到站场设备当前的实际运行情况,对基本失效概率进行修正,使失效概率符合实际情况;m为失效因素的个数。
2)设备的失效后果评估采用评分模型,其计算公式为:
Cof=PH*LV*DS*RT
其中,Cof表示失效后果总分,PH表示介质危害性评分,LV表示泄漏量评分,DS表示扩散情况评分,RT表示危害受体评分。
将设备的失效概率和失效后果作为数据的两维特征,构成数据集;对数据集进行聚类,对设备的风险划分为数个风险等级。
3)将设备的失效概率和失效后果作为数据的两维特征,结合起来进行风险评价。首先建立无标签数据集X。
其中,x1、x2、x3、…、xm均表示数据的特征,且均为二维向量,包括失效概率和失效后果两个特征。
其次,对数据集进行聚类。数据集的数据x为二维数据,包括x1、x2、x3、…、xm;将数据集聚类为k个簇C1、C2、…、Ck,k取值为4。4个簇分别代表了风险等级为高风险、较高风险、中风险、低风险四个风险等级。
最小化损失函数为:
式中,x为数据集的数据;μi为簇的中心点,其计算公式:
其中,簇的中心点选取,包括:
在站场设备样本中随机选取4个样本点充当各个簇的中心点;{μ1,μ2,…,μi}
分别计算所有站场设备样本点与四个簇中心点之间的距离dist(xi,μi),将样本点划入离簇中心最近的簇中;
根据簇中所有的样本点,计算簇中心;
重复上述中心点选取步骤,直到迭代更新后聚类结果保持不变。
最后,根据风险值情况将站场内设备的风险划分为了高风险、较高风险、中风险和低风险4个风险等级。
根据天然气站场内各设备的流速、流量、位置高度、压力和温度5类运行数据进行K-means聚类,具体包括:
各设备的运行数据y为5维数据,包括y1、y2、y3、…、yr,r为设备的数量;
将数据集聚类为n个簇C1、C2、…、Cn,n取值为大于1的整数;
最小化损失函数为:
式中,y为设备的运行数据;μi为簇的中心点,其计算公式:
其中,簇的中心点选取,包括:在站场设备样本中随机选取n个样本点充当各个簇的中心点;分别计算所有站场设备样本点与n个簇中心点之间的距离,将样本点划入离簇中心最近的簇中;根据簇中所有的样本点,计算簇中心;重复中心点选取步骤,直到迭代更新后聚类结果保持不变,从而将站场设备划分为n类。
2.3 选用凸优化理论计算扫描角度
凸优化理论[10]的核心工具是Lagrange对偶,它为凸优化问题的解的最优性,从而为设计有效的凸优化算法提供了保证。云计算、大数据等研究的兴起和发展为凸优化提供很好的应用,一般而言大量的应用问题都在努力地规约或近似未凸优化问题。这样可以很好地应用凸优化算法,即使问题本身是非凸的。相关的有效应用的案例大大地扩展了凸优化的应用范围,如数据处理、机器学习、经济管理和机器学习等包括计算、分析以及工程研究许多领域。
根据设备的分类确定相应的激光传感器的激光扫描角度,以TDLAS激光传感器能接收到其发射的激光的反射作为约束条件,并以其发射的激光到反射面之间的实际激光光程最短为目标,利用凸优化理论的KTT条件得到激光传感器的激光扫描角度,示意图见图3。
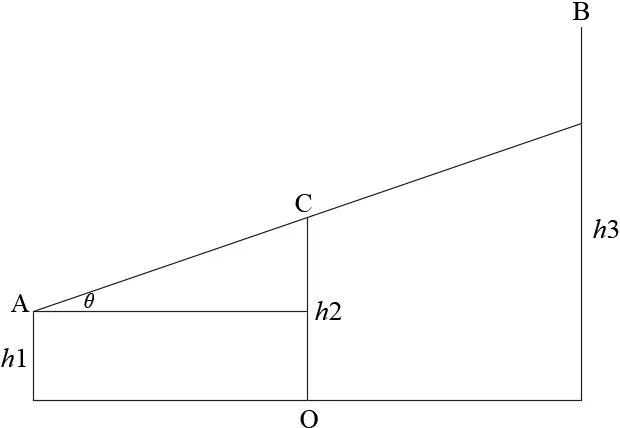
图3 激光扫描角度示意图
计算过程如下:
标准约束化问题:minf(θ)
s.t.g(θ)=0
h(θ)<=0
Lagrangian函数:L(θ,λ,μ)=f(θ)+λg(θ)+μh(θ)
h(θ)=h1+b*tan(θ)-h3
根据KTT条件,即可得到激光扫描角度θ。
其中,c为激光扫描的最远距离,h1为TDLAS激光传感器A的高度,h2为泄漏云团中心高度(泄漏点O至泄漏云团中心C之间的距离),h3为反射面B的高度,a为激光传感器距离泄漏点的水平距离,b为激光传感器距离反射面的水平距离,λ、μ为拉格朗日乘子。
2.4 实现高效精准检测
通过上述设计,不同设备扫描倾斜角度和距离得到合理的计算,同时根据不同的风险等级确定相应的扫描频次,风险等级越高,扫描频次增加,实现高效精准检测。
3 结语
针对天然气智慧站场对站场泄漏智能化检测的更高要求,设计并探索了风险评价技术、TDLAS技术和人工智能算法在巡检机器人泄漏检测方面的应用:一是将风险评价和站场泄漏检测结合起来,实现风险分级高效检测;二是利用人工智能的方法对不同设备之间的泄漏云团大小进行聚类,有利于检测的智能化,利用凸优化的KTT条件的方法,计算出合理的扫描倾斜角度和激光传感器距离站场设备的位置,为智慧站场建设提供技术参考。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
有色设备(2021年4期)2021-03-16
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
电脑报(2019年4期)2019-09-10
铁路技术创新(2015年3期)2015-12-21
大众摄影(2015年9期)2015-09-06