
一种拖车式医用配送机器人的设计与实现
2021-06-08 12:00任工昌尚亚东刘朋胡小龙
计算机时代 2021年1期
任工昌 尚亚东 刘朋 胡小龙


摘 要: 应急防控智能机器人在疾病防控中扮演着重要的角色。针对疫情防控过程中出现的物料配送不足问题,设计了一种医用配送机器人,采用拖车式结构,将立体循环车厢与机械手结合实现递送服务。系统采用了装有ROS系统的MiniPC和STM32单片机,实现了机器人自主定位导航和机械手通过视觉识别完成抓取动作等功能。样机的实验结果显示,系统实现了设计功能,实现了配送过程的全程自动化。
关键词: 立体循环车厢; 机器人; ROS; 机械手
中图分类号:TP242.6 文献标识码:A 文章编号:1006-8228(2021)01-41-04
Design and implementation of a trailer-type medical distribution robot
Ren Gongchang, Shang Yadong, Liu Peng, Hu Xiaolong
(College of Mechanical and Electrical Engineering, Shaanxi University of Science and Technology, Xi'an, Shaanxi 710021, China)
Abstract: Intelligent robot for emergency prevention and control plays an important role in disease prevention and control. In order to solve the problem of insufficient material distribution in the process of epidemic prevention and control, a medical distribution robot is designed, which adopts a trailer structure and combines the three-dimensional circulation carriage with the manipulator to realize the delivery service. The system adopts a MiniPc installed with ROS system and STM32 single chip microcomputers to realize the functions of autonomous positioning and navigation of robot, and grasping action of manipulator through visual recognition. The experimental results of the prototype show that the system realizes the designed functions and realizes the full automation in whole material distribution process.
Key words: three-dimensional circulation carriage; robot; ROS; manipulator
0 引言
隨着机器人技术的快速发展,出现了用于各种领域的机器人,在物流配送行业内出现了各种物流配送机器人,配送机器人可以代替人类完成重复、繁重的工作[1]。在抗击新型冠状病毒期间,出现了各种医用配送机器人,以降低医护人员的交叉感染风险,减少医护人员与病人接触,提高管控工作效率,减轻医护人员的心理压力。
配送机器人可以在生产过程、运输过程、配送过程发挥重要作用,配送机器人也可以在医院、隔离区等多场景开展物资配送工作,出现的各种医用配送机器人,大多都是一体式[2];机械手与配送机器人二者结合,它能够在复杂环境中自主定位并递送产品、货物等[3]。
本文以拖车式结构为基础,设计一款立体循环式车厢,ROS系统作为上位机,处理编码器、激光雷达、深度摄像头反馈的信息,STM32F103作为下位机接受上位机传递的信息,控制电机转动,最后完成样机的制作,并在样机上进行实验。
1 总体设计方案
配送机器人的设计主要由机械结构和控制系统两部分组成,采用拖车式结构,对机器人的车厢结构和自动连接装置进行设计,通过自动连接装置连接,实现一机多车厢的功能,将立体循环车厢与机械手结合,便于视觉识别、定位和机械手抓取,控制系统采用上位机和下位机的结构,分别对机器人的上位机ROS系统进行设计和下位STM32进行设计,利用深度摄像头对物品进行识别和定位。
2 医用配送机器人结构设计
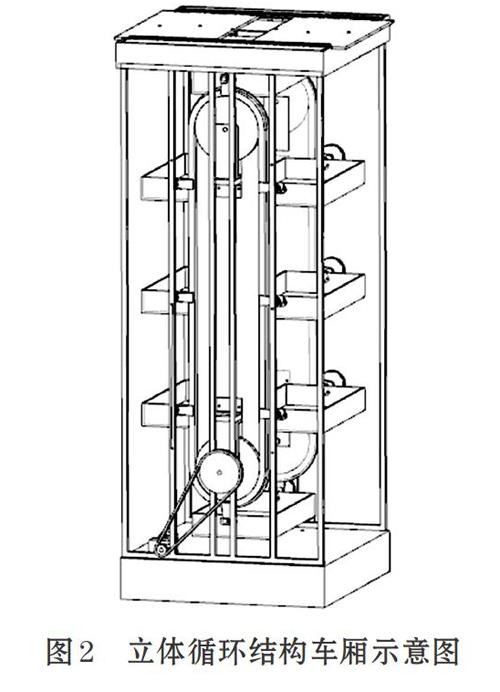
采用拖车式机器人结构,由牵引车头和拖车两部分组成,如图2所示。牵引车头主要提供动力和自主导航,拖车部分由模块化的车厢构成,实现不同任务更换不同车厢的功能,其中针对口服药品、食品的配送设计一款立体循环式车厢,车厢前侧安装一款5自由度机械臂,车厢后侧安装深度摄像头,牵引车部分和拖车部分通过自动连接装置连接。
2.1 立体循环车厢设计
针对医药用品的配送,设计了一款立体循环式车厢,保证医药用品的安全存取,易于摄像头的识别与定位,便于机械手的抓取,如图2所示。
立体循环车厢主要包括循环结构、平衡结构,采用链条链轮循环结构使小车箱循环转动,平衡结构根据直线段和圆弧段两部分分别采用滑块导轨和行星轮结构,保证小车箱始终保持水平状态。
结合深度摄像头信息,控制系统可以控制每一个小车箱运动到最高处停止运动,进行存储;该车厢的存储和取物品的位置为同一位置,处于循环机构运动的最高处。设计平衡机构保证每个小车厢始终保持水平状态,且车厢结构紧凑,适用于智能配送机器人,箱门开口朝上方便机械手存取。
2.2 连接装置设计
自动连接装置是由连接杆、曲柄滑块、压力传感器组成,如图3所示。自动连接装置有自动连接和自动脱落两种状态。自动连接状态,当连接杆一端触碰到连接槽的压力传感器时,控制装置控制电机转动,带动曲柄的转动,连杆连接滑块,使滑块向下运动,挡住连接杆,使拖车车头和车箱连为一体;脱落状态,控制装置控制电机转动,使滑块向上运动,连接杆脱落,使拖车的车头和车箱分离。车箱可以针对不同任务设计多种样式车厢,通过自动连接装置可以更换不同样式的车厢。
3 控制系统
3.1控制系统硬件设计
系统是由上位机和下位机两部分组成,装有ROS系统的MIniPC作为上位机处理编码器、激光雷达、深度摄像头反馈的信息,与远程计算机通过无线路由器实现数据互传,处理后的信息实时的传给远程计算机,远程计算机以这些信息对多台配送机器人进行调度。STM32F103作为下位机控制单元,由于采用牵引车和拖车的结构,分别用三个STM32F103来控制,第一部分为控制牵引车,位于牵引车头,第二部分为控制立体循环车厢,位于拖车部分,第三部分机械臂有专用的控制器,其硬件连接如图4所示。
激光雷達采用RPLIDARA2雷达,该设备与车载PC直接连接,将扫描数据直接发送至上位机处理。
深度摄像头采用乐视3D体感摄像头,型号为LeTMCM-302,将获取的信息直接发送至上位机处理,可以通过算法对目标物进行定位与识别,从而实现机械手自主存取物品的控制。
3.2 控制系统软件设计
控制系统软件框架如图5所示,软件控制系统主要分为三层,操作系统层、驱动层和硬件层[4-5]。
Ubuntu14.04系统安装有ROS,版本为Kinetic,作为操作系统层核心,各个功能包有着不同的作用,move_base包可以根据各个传感器反馈的信息进行路径规划,使机器人移动到指定位置,amcl包主要是根据已有的地图进行自主定位与导航,Cartographer包实现建图功能,rviz为ROS提供了一种可视化工具等。
驱动层有的是硬件驱动,有的是软件驱动,各个驱动包安装在上位机,如乐视3D体感摄像头的驱动包ros_astra_camera安装在上位机中。
3.3 下位机软件设计
下位机的主要作用是通过订阅话题的通信方式,接收上位机传来的运动信息,并通过增量式PID控制算法实现电机速度的无级调节,并向上位机反馈当前运动数据和传感器的信息。
STM32F103作为下位机控制单元,由于采用牵引车和拖车的结构,分别用三个STM32F103来控制,如图6所示,分别为牵引车驱动模块、立体循环车厢转动模块、机械臂模块。第一部分为控制牵引车,位于牵引车头,通过电机驱动模块实现对二个差速驱动轮的实时控制,其中,电机带有二进制光电编码器,可将运动数据反馈至控制单元中,实现对驱动轮的闭环控制;第二部分为控制立体循环车厢,位于拖车部分,控制立体循环式车厢的转动及厢门的开合,其中,驱动立体循环机构的电机带有二进制光电编码器,由于每个小车厢的均匀分布,通过PWM控制使小车厢到达最高处,设置有传感器可以使循环机构恢复初始状态,箱门框架处设置有光电传感器,通过光电传感器对箱门进行限位;第三部分机械臂有专用的控制器;第一部分与上位机MiniPC之间采用串口通信实现数据互传,第二、三部分与上位机MiniPC之间采用蓝牙连接实现数据互传。
3.4 上位机软件设计
采用分布式处理框架的ROS系统作为上位机,主要两个模块是定位导航和机械臂控制,提供许多开源的功能包,帮助我们迅速完成软件系统搭建。上位机软件设计如图7所示在定位导航模块,利用Cartographer功能包实现建图功能[6],在建好地图的情况下,ROS导航主要需要使用到两个功能包,一个是move_base,另一个是amcl。move_base功能包可以根据各个传感器反馈的信息进行路径规划,使机器人移动到指定位置,路径规划通过 move_base 功能包实现,具体可分为全局路径规划和局部路径规划,全局路径规划采用迪杰斯特拉算法,局部路径规划采用动态窗口方法 DWA(Dynamic Window Ap-proaches)计算最优避障路径及机器人的实时速度和角速度[7],amcl功能包主要是根据已有的地图进行自主定位与导航,它采用了自适应蒙特卡罗定位算法[8]。
机械臂控制使用MoveIt。它属于ROS系统的一部分,用于控制多关节机械臂;提供了一系列成熟的插件和工具,可以实现机械臂控制的快速配置;封装了大量API,方便在MoveIt模块上进行二次开发[9、10]。主要包括碰撞检测、运动学求解、运动路径规划、操作控制等功能[11.12]。通过Solidworks三维建模转为URDF模型,用Move It对URDF模型进行配置,配置流程如图8,配置完成后,创建和修改一些文件,通过话题通信方式控制真实的机械臂。
4 实验及分析
根据设计的医用配送机器人机械结构,采用铝型材、亚克力板等材料,制作的样机如图9所示。
如图10是机器人在直线走廊建图,红色线条表示局部路径规划,说明该机器人能够顺利的躲避障碍物,实现自主导航功能;图11是机械手自动抓取过程实物展示图。控制立体循环车厢的转动及箱门的开合,通过乐视3D体感摄像头的识别与定位, MoveIt控制机械手实现自动抓取功能。
5 结束语
本文设计了拖车式医用配送机器人的车厢和自动连接装置的机械结构,对立体循环车厢的控制系统进行设计,最后制作出医用配送机器人的样机,对该样机在室内走廊中进行了建图、导航及避障的实验,以及机械手的抓取实验,结果显示,机器人达到室内配送的要求,能够实现全程自动化。下一步研究视觉识别,通过视觉识别,完成物品的分类。
参考文献(References):
[1] 任工昌,吴梦珂,朱爱斌等.带单节拖车的机器人控制系统的设计与实现[J].电子技术应用,2018.44(11):41-44
[2] 任工昌,胡小龙,刘朋,吴梦珂.基于ROS的冷链配送机器人设计[J].包装工程,2020.41(3):194-199
[3] 张辉,王耀南,易俊飞,钟杭,刘理,缪志强,江一鸣.面向重大疫情应急防控的智能机器人系统研究[J].中国科学:信息科学,2020.50(7):1069-1090
[4] 张鹏,高放,双丰.基于ROS的全向移动机器人控制系统的设计与实现[J].组合机床与自动化加工技术,2018.7:89-92,96
[5] 胡春旭,熊枭,任慰等.基于嵌入式系统的室内移动机器人定位与导航[J].华中科技大学学报( 自然科学版),2013.41(S1):254-257
[6] 梁明杰,闵华清,罗荣华.基于图优化的同时定位与地图创建综述[J].机器人,2013.35(4):500-512
[7] 张军,韦鹏,王古超.基于ROS的全向移动机器人定位导航系统研究[J].组合机床与自动化加工技术,2020.6:119-122
[8] 李建坡,时明,钟鑫鑫.自适应蒙特卡罗无线传感器网络移动节点定位算法[J].吉林大學学报(工学版), 2014.44(4):1191-1196
[9] 郝奇.基于ROS的室内自主移动抓取机器人平台设计与研究[D].安徽工业大学,2019.
[10] 徐建明,吴蜀魏,吴小文,张文安,俞立.基于ROS和IgHEtherCAT主站的SCARA机器人控制系统[J].高技术通讯,2019.29(9):876-885
[11] 张占宾,李小坚.带移动底盘的机械臂控制系统设计[J].工业控制计算机,2018.31(9):90-91
[12] 王海玲.基于ROS视觉定位的机器人智能抓取系统研究[D].天津理工大学,2019.
收稿日期:2020-09-11
基金项目:西安市未央区科技计划项目(201914)
作者简介:任工昌(1962-),男,陕西西安人,博士,陕西科技大学教授、博导,主要研究方向:产品创新理论。
通讯作者:尚亚东(1995-),男,陕西汉中人,硕士,主要研究方向:图像识别。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
金桥(2019年10期)2019-08-13
制造技术与机床(2018年11期)2018-11-23
通信电源技术(2016年1期)2016-04-16
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
机电信息(2015年3期)2015-02-27
机电信息(2014年29期)2014-02-27
河南科技(2014年11期)2014-02-27
