
基于优化模糊控制的汽车自适应巡航技术研究
2021-06-17 03:03汤峰
浙江水利水电学院学报 2021年2期
汤 峰
(安徽交通职业技术学院 汽车与机械工程系,安徽 合肥 230051)
近年来,我国私家车数量逐渐增加,虽然为人们的出行提供了便利,但是交通拥挤问题比较严重,尤其是出行高峰期,在此时段发生的交通事故较多。除此之外,还有一部分司机因操作不熟练,或者疲劳驾驶,发生多起交通事故。在此时代背景下,人们加大了对汽车驾驶安全性的要求。汽车自适应巡航控制系统(adaptive cruise control,ACC)是一种支持自动化控制的辅助驾驶系统,能够在汽车行驶期间定速巡航,检测与前车之间的距离,根据车辆相对速度自动调节气门开度,有效制动踏板作业状态,以达到控制行程的目的。因此,ACC成为了汽车发展领域重点研究内容。目前,ACC系统的研发停留在目标车辆的识别及相对车速的判断,并且方案尚不成熟,目标车辆的识别及判断精准度偏低,仍需进一步探究。本文利用模糊控制技术提出汽车自适应巡航控制系统模型,通过搭建模糊控制机器结构,构建ACC系统体系,设计控制流程,完善ACC控制系统设计方案,研究旨在为ACC系统的深入研发提供理论支撑。
1 优化模糊理论概述
1.1 模糊理论概念
模糊理论(fuzzy theory)是指运用现阶段的模糊集合概念或者相关的隶属度函数而形成的理论,其包含的内容较多,如模糊决策、模糊系统、模糊数学、模糊逻辑等,各领域之间存在密切的关联性,被广泛的应用在汽车领域中[1]。例如,现阶段灵活运用模糊理论内容来进行模糊系统设计,以实现模糊控制,为人们提供优质的服务。[2]
1.2 模糊控制
模糊逻辑控制理论(fuzzy logic control theory)又被称模糊控制理论(fuzzy control theory)[3],原理是通过模糊的概念或者方法进行处理,模拟人的思维,进而实现对复杂过程的控制。该理论的优势在于实践过程中不需要建立数学模型就可以控制,降低复杂系统的控制难度,满足现阶段的发展需求。当前的模糊控制系统可以划分为三部分,包括模糊化、模糊推理、清晰化,其各自的功能呈现出明显的不同。首先,通过模糊化进行数据的转化,将数据转化为模糊量;其次,对模糊量进行分析,明确模糊量,进行推理与判断;最后,进行合理的模糊量输出,将其内容转化为精确的数字量,达到清晰化的目的,达到输出控制的目的,图1[4]为实际的模糊控制器。

图1 模糊控制机器组成
图1中模糊化过程比较常用的方法为加权平均法,输出信号结果为:
(1)
公式(1)中,系数ki为变量,需要根据实际情况确定具体数值。
经过模糊化处理后,通过模糊推理及清晰化处理,最终得到被控对象。由于模糊控制器输出的结果为模糊子集,所以清晰化处理的作用是提高模糊量的精准度,对模糊推理的结果进一步缩小范围,从而获取可以识别的精准控制量。目前应用比较多的清晰化处理方法为重心法,见计算公式(2):
(2)
1.3 ACC模糊控制系统
模糊控制是智能控制的重要组成部分,出现于20世纪70年代,其将模糊数学与控制理论相结合,形成模糊逻辑。ACC系统控制器以PID控制算法为基础,主要有分层式控制与直接式控制,利用控制器进行数据收集,为后续的控制提供数据信息[5]。在ACC系统运行中,应合理的预设巡航车速,通过控制器对过程进行控制,保证其达到预定的车速,图2为ACC系统的PID控制框图。
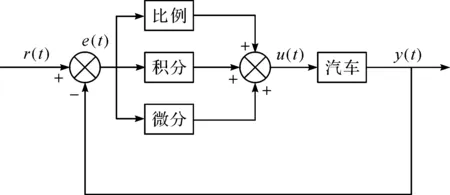
图2 ACC系统的PID控制框图
在此基础上融入模糊控制理念,提升控制系统的适应性,保证其可以有效地进行分析,并利用模糊隶属函数进行总结,以驾驶数据为基础保证系统符合人体行为操作习惯,图3为实际的系统构成图。[6]

图3 ACC系统控制结构图
2 基于优化模糊控制的汽车自适应巡航控制系统模型
2.1 车辆纵向动力学模型
对于ACC系统而言,在应用过程中想要保证系统充分发挥出自身的优势,实现既定的定速巡航与跟随巡航目标,应以精准的车辆纵向动力学模型为基础,全面分析汽车运行情况,在仿真运行中探索各种情况,开发出更高价值的产品[7]。针对性的进行设计分析,开展汽车纵向动力学模型假设,如车辆在平直路面上的刚体运动规律、车辆左右轮胎的动力学分析、路面系数分析,根据实际情况分析、制作车辆纵向动力学模型(见图4),分析各部分组成。

图4 车辆纵向动力学模型
2.2 汽车自适应巡航控制系统的距离模型
通过分析发现,现阶段的ACC系统在运行过程中想要实现自身的功能,应做好各项内容的基础控制,以促使其整体性提升,保证行车安全,同时为乘客营造舒适的乘车环境,达到最终的目的[8]。灵活利用安全距离算法进行计算,将现阶段的安全行车间距进行合理的划分,可以划分为可变安全距离与固定安全距离,二者的内容存在一定的不同,可变安全距离是指行车过程中与前车的安全距离呈现出明显的变化,而固定距离则是现阶段行车过程中安全车距保持不变的状态,并且不受道路环境因素的影响,因此应合理的进行安全距离算法设计,根据实际情况进行优化,以达到安全行驶的目的。
3 基于优化模糊控制的汽车自适应巡航技术分析
3.1 模糊控制的数学基础
研究发现,在基于优化模糊控制的汽车自适应巡航技术分析过程中,应首先明确模糊集合,分析其产生的影响,利用模糊概念来定义,选择多种方法进行表示,如矢量表示法、函数描述法、序偶表示法等。隶属度函数是模糊控制的重点,也是其应用的基础,应通过准确的隶属度函数来开展各项控制,常见的函数有高斯型隶属度函数、梯形隶属度函数、三角形隶属度函数等,在应用实践过程中也可以进行合理的函数组合,以达到精准控制的目的。[9]去模糊化过程较为重要,灵活利用现阶段的模糊化推理来进行清晰化处理,以此来获得精准的控制过程,优化其最终的结果[10]。
3.2 ACC系统模糊控制器设计
3.2.1 ACC控制流程
在处理过程中,根据实际情况来分析ACC系统控制策略流程,优化现阶段的策略,明确汽车自身呈现出的性质特点,以提升整体的控制质量。汽车可以归属于非线性系统,在实际的运行过程中,容易受到外界的路况、环境等多种因素影响,形成较为复杂的过程,因此在分析过程中,可以根据实际情况建立精确的模型,优化整体的系统性,实现整体的汽车巡航控制,满足现阶段的需求。在进行模糊控制器设计过程中,应保证实际距离与安全距离的误差作为输入量,而制动踏板与开度的行程作为输出,选择模糊语言变量来设计,做好隶属度函数的选取,明确控制器模糊规则,确定变量论域[11]。如图5所示为ACC系统的具体控制流程。

图5 ACC控制流程
3.2.2 控制器输入量模糊
通过分析发现,现阶段的模糊化实际上是指将输入量与输出量的精确数字表达按照实际的程序进行转化,转换为当前某些限制范围中模糊语言的变量值,以促使其整体性提升[12]。首先根据现阶段的输入量与输出量的实际变化范围进行分析,利用模糊控制来对语言变量模糊集的论域进行选择,确定语言变量值,通过隶属度函数进行控制,完成模糊化的过程,达到最终的目的。[13]例如,对安全距离与实际距离开展分析,明确距离差值变量,获得踏板量的语言变量。
3.3 输入输出变量
设计模糊控制器时应确定其输入变量,从物理论域与模糊论域两方面进行,确定比例因子与定量化因子[14]。实际上,量化因子的功能在于输入值的控制,将输入值转化为现阶段相对应的论域,从物理论域转化为模糊论域,而比例因子则存在明显的不同,其是将现阶段的输出从模糊论域转化为实际的物理论域,以达到最终的目的。以实际为例,对距离变化的区间开展分析,确定其区间,根据当前的实际情况进行测量,利用距离差值变化量变化区间进行确定,做好踏板增量变化分析,确定各项数据。与此同时,还应根据实际情况合理的进行隶属度函数选择。
3.4 控制器模糊规则
模糊规则是现阶段模糊推理过程中需要遵循的控制规则。通常情况下通过模糊语言进行描述,如以曲线图来表达,可以根据现阶段的实际情况进行处理,确定其距离差值的语言变量值子集与期望踏板行程的语言变量值子集,利用控制器来控制其差值,以此来明确控制量与差值之间的逻辑关系,获得实际的控制规则。以实际为例,在某距离差值时间响应曲线中,需要根据现阶段的具体情况进行分析。当现阶段的距离差值达到差值零时,其正向的距离差值则可能呈现出增大的趋势,产生明显的影响,因此应保证汽车具有较强的制动力。当正向的距离差值达到最大值时,距离差值的变化量等于零,此时也需要汽车产生较大的制动力,以保证其运行安全。
4 结 论
本研究与其他研究相比的改进点在于利用模糊控制技术,缩小前车速度和安全距离计算结果误差,以此提高ACC系统控制汽车行驶作业精准度,使得系统控制安全性作用得以充分发挥。目前,大部分研究停留在前车目标检测及控制相关参数计算方面,缺少对目标车辆行驶速度等参数的计算机控制方法研究。在接下来的研究中,应该以多目标车辆作为ACC系统控制模型设计重要内容,全面分析汽车行驶情况,逐渐完善系统自动控制功能。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
高师理科学刊(2020年2期)2020-11-26
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
中成药(2017年6期)2017-06-13
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
电子科技(2015年11期)2015-03-06
