
器件共享型三电平逆变器容错控制
2021-07-14 02:04朱琴跃徐璟然谭喜堂李大荃黄修晗
电机与控制学报 2021年7期
朱琴跃, 徐璟然, 谭喜堂, 李大荃, 黄修晗
(同济大学 电子与信息工程学院, 上海 201804)
0 引 言
随着电力电子技术的快速发展,多电平变流器在我国高速电气化铁路、城市轨道交通和新能源电动汽车等领域得到了广泛应用[1-2],其中有源中点钳位型(ANPC)多电平逆变器因其性能稳定、对损耗的平衡控制更加灵活等优点已逐渐成为多电平逆变器的主流[3]。与其它传统的如中点钳位型(neutral point clamped,NPC)等多电平逆变器相比,由于在相同电平下ANPC逆变器的功率开关器件数目较多,系统发生故障的概率也相对较高;若发生故障后不能及时处理,将影响整个电路的安全运行,甚至造成不可估量的损失。据统计,变流器中最易发生故障的是IGBT等功率开关器件[4],其故障主要表现为开路和短路。而在实际应用中,通常在IGBT两侧串联快速熔断器,当IGBT出现短路故障后会断开电路转化为开路故障。因此ANPC多电平逆变器运行过程中,如何对IGBT开路故障采取有效的容错控制方法,以确保系统维持基本稳定运行已成为近年来国内外学者关注的问题。
目前,针对NPC三电平逆变器硬件冗余型容错控制的研究较多,主要成果集中在开关冗余型、相冗余型两方面。开关冗余型利用逆变器基本拓扑的冗余电压矢量进行容错控制[5-6],不需要增加额外的开关管,成本较低;但由于故障后的冗余空间矢量较少,只能容错特定类型的故障,其它类型的故障则需要降额运行。相冗余型则通过额外增加一个三电平桥臂实现容错,当电路的某相桥臂出现故障时,用来替换故障相运行[7-8],因而能够对单个桥臂内的任意故障进行容错且不会降额运行;但是所需功率开关管数量和成本会明显增加,并且面对多桥臂故障时容错能力不足。
相比于此,基本ANPC三电平逆变器凭借自身拓扑结构的特点,通过合理控制钳位IGBT的通断,使逆变器具有一定的开路故障容错能力,但对同一桥臂内发生多个开关管开路故障的容错能力有限,且容错开关管承受的电压有所升高[9-10]。针对此,Anderson V. Rocha提出了自愈型容错拓扑[11],通过在输出端增加双刀双掷开关,利用桥臂自身冗余资源对桥臂内发生的多种故障进行容错,且不影响其他桥臂的正常工作。然而冗余器件的增加,一方面提高了逆变器控制的复杂性,另一方面增加了其体积和成本;同时非故障时多个IGBT处于闲置状态,功率器件利用率低。
上述硬件冗余型容错拓扑必须匹配相应的容错控制算法才能实现整个容错过程,现有容错控制策略为了简化控制过程,往往先离线建立特定故障类型与其对应的容错拓扑重构算法和PWM控制策略间的映射关系表[12-14],供容错控制时查表获取相关信息,实现拓扑重构和容错运行。该方法虽然实现成本低,使用方便,但一旦系统发生非预期故障时便极有可能失去容错能力,甚至会对系统造成破坏性后果。
为此,本文提出器件共享型ANPC三电平逆变器容错拓扑,在对多类复杂故障进行容错控制的基础上,提高功率器件的利用率,降低系统成本;同时为解决现有离线容错控制算法对非预期复杂故障容错能力较弱的问题,提出一种基于组合逻辑的自适应容错控制算法,根据故障类型和故障位置实时获得合适的容错控制所需的信息,实现容错控制;最后,通过仿真与实验验证本文所提容错拓扑及控制算法的正确性和有效性。
1 器件共享型ANPC拓扑的设计
1.1 器件共享型容错拓扑的提出
所提出的ANPC三电平逆变器容错拓扑主要基于器件共享的思想,使逆变器经过重构后实现同一个功率器件承担两相甚至是三相电流负荷的功能,以使逆变器在实现容错的同时,减少闲置器件的数量。相应容错拓扑如图1所示,其中虚线框内是A相桥臂,与之关联(B相桥臂)的重构器件在图中已用浅色点划线框标出。
由图1可知,器件共享型拓扑在基本ANPC拓扑基础上,每相增设拓扑重构开关器件:一个双刀双掷开关Sk、两个双向晶闸管Tku和Tkd以及两个单向晶闸管Sku、Skd,k=a,b,c。各重构开关器件的作用为:

图1 器件共享型ANPC逆变器容错拓扑结构Fig.1 Fault-tolerant topology of the device-sharing ANPC inverter
双刀双掷开关用于在桥臂发生内管故障后切换每相主桥臂内管与箝位管在相输出中的位置。以A相桥臂为例,双刀双掷开关用于选择A相输出位置:当开关Sa的动头处在位置“1”时,功率器件Ta1、Ta2、Ta3、Ta4作为主桥臂,功率器件Ta5、Ta6起到钳位作用;当开关Sa的动头处在位置“2”时,功率器件Ta1、Ta4、Ta5、Ta6作为主桥臂,功率器件Ta2、Ta3起到钳位作用。
双向晶闸管用于在桥臂发生外管故障后将其他两相的外管作为冗余器件代替故障外管。以B相外管与A相外管的连接为例,如图1中点划线框标注的重构关联器件所示,Tb1和Tb4为B相主桥臂外管,分别通过Tau、Tbu和Tad、Tbd与A相外管并联;当A相外管发生开路故障时,B相外管可作为备用功率器件承担A相外管的作用,提供A相电流通路。
与主桥臂内管并联的单向晶闸管用于在发生严重内管故障的情况下对故障内管进行隔离,避免在发生复杂相间多管故障时降额运行。
显然,该拓扑同时利用三相相同位置的开关管互为冗余器件,相比于自愈型ANPC容错拓扑每相桥臂均少用了2个IGBT,在降低成本缩小体积的同时,提高了功率器件的利用率;同时,在不降低系统输出性能或少量降低输出性能的情况下,能够对单管开路、双管开路以及相间多管开路等复合故障进行容错,具有更好的复合故障容错能力。
1.2 容错拓扑重构方法
根据同时发生开路故障的IGBT数目及位置,将故障分为单管故障、相内双管故障、相间多管故障三类,下面阐述各类故障的容错拓扑重构方法。
1.2.1 单管故障拓扑重构
以A相桥臂为例,根据其单管开路故障发生位置的不同,可分为外管、内管和钳位管故障三类,相应的拓扑重构示意分别如图2(a)、(b)、(c)所示,其中实线和虚线分别表示拓扑重构后故障桥臂输出正电平“P”和零电平“O”的电流通路。

图2 A相单管故障容错拓扑重构图Fig.2 Fault-tolerant reconfiguration figure of the single-device fault in phase A
重构方法如下:若A相桥臂外管Ta1发生开路故障,触发双向晶闸管Tau和Tbu导通,使B相外管Tb1作为冗余器件替代Ta1构成A相正向“P”电平的电流通路,将原本Ta1的触发信号作用于Tb1即可实现容错运行。此情形下,由于经由Tb1可同时在A相和B相输出“P”电平,为避免B相输出“P”电平而A相输出非“P”电平时两相相互影响,此时可限定A相只能使用Ta6和Ta3来输出“O”电平,而当A相输出“N”电平时则无影响。
若A相桥臂内管Ta2发生开路故障,控制双刀双掷开关Sa的两个动头均切换到位置“2”,钳位管Ta5、Ta6替换Ta2、Ta3变成主桥臂内管,Ta2、Ta3转变为钳位管,这样可利用Ta3为零电平“O”的输出提供通路。
若A相桥臂钳位管Ta5发生开路故障,控制双刀双掷开关Sa、2个双向晶闸管Tau和Tad均不动作,采用基本NPC三电平逆变器的控制策略保持正常电压输出。
由此可见,当逆变器发生单管故障时,只需进行简单的拓扑重构即可完成容错,重构后调制策略需发生一定改变。
1.2.2 相内双管故障拓扑重构
ANPC三电平逆变器单相桥臂中共有6个IGBT,当有两个功率开关同时发生故障时,考虑到开关位置的对称性及容错后运行状态,可将单相桥臂的双管故障分为五类。仍以A相为例,其双管故障类型如表1所示,不同类型故障的拓扑重构方法如下:

表1 A相双管故障分类
若发生①类、②类和③类故障时,根据上述单管故障的重构方法,触发相应的双刀双掷开关或双向晶闸管动作即可完成拓扑重构,使逆变器恢复正常输出。需要注意的是,当发生②类故障时,由于特定的功率器件在拓扑重构后将在两相间共享使用,为防止出现直通现象短接直流母线电容,需将故障相退化为两电平输出,其余两相仍维持三电平输出。而当发生①类和③类故障时,容错控制方式与单相外管发生故障时一致,即使用与故障外管不相邻的两个内管来输出“O”电平。
若发生④类故障时,如A相内管Ta5、Ta6同时发生故障,故障A相桥臂退化为基本NPC结构,此时A相采用NPC基本控制策略,便可使其维持正常三电平输出。
若发生⑤类故障中的Ta2和Ta6同时开路故障,此时不管如何切换开关Sa,主桥臂总会存在一个故障内管,只能输出“P”电平或“O”电平的一种,无法正常输出电平,其空间电压矢量分布如图3所示。由此可见,该矢量序列将无法构成圆形磁链对三相对称负载进行控制。为避免采用传统容错控制方法使故障相输出持续零电平并通过调整控制策略来实现降额运行,针对该类故障通过控制与主桥臂内管并联的单相可控晶闸管动作,实现拓扑重构后仍能实现三电平输出。相应的拓扑重构方法为:保持双刀双掷开关Sa不动作,触发与Ta2并联的单向晶闸管Sau导通,将原本开路的Ta2单向短路,从而维持三电平输出。相应的拓扑重构示意如图4所示,图中实线路径为续流管Da2和单向晶闸管Sau构成的“P”电平双向电流通路,虚线路径为“O”电平的双向电流通路,点划线路径为“N”电平的双向电流通路。

图3 Ta2、Ta6双管故障空间矢量分布图Fig.3 Space vector distribution of double-device fault Ta2、Ta6

图4 Ta2、Ta6双管故障拓扑重构图Fig.4 Topology reconstruction of double-device fault Ta2、Ta6
由此可见,上述①~④类双管故障容错后的故障桥臂可工作于三电平或两电平状态,调制比不降低,且每个IGBT只需承受Ud/2的电压。而⑤类故障发生后,若桥臂外管的耐压值具有一定的裕量,则容错后能在不降低调制比和不降额的条件下实现三电平运行,此时桥臂外管的耐压值将从Ud/2提高到Ud;否则可控制开关Sa的两个动头分别处在同侧位置“1”和位置“2”,控制A相持续输出“O”电平,实现降额运行。
1.2.3 相间多管故障拓扑重构
此类故障可等效为多个单管故障和双管故障的复合,采用前文所提方法,同时利用三相ANPC固有的互相冗余便能进行拓扑重构,实现有效的容错控制。
但若出现一种特殊故障情况,即当单相桥臂有3个及以上开关管同时发生故障,部分故障拓扑已经失去容错能力,可通过双刀双掷开关将故障相输出直接与直流母线中点相连,实现降额运行。
如图5所示,若A相内管Ta1、Ta2、Ta6同时发生开路故障时,桥臂不能正常工作,空间电压矢量分布如图6所示。此时,可控制双刀双掷开关Sa动头位置进行切换,将A相输出端直接与直流母线中点相连,使故障相恒定输出“O”电平,实现降额运行。容错重构后空间电压矢量分布如图7所示,其中虚线圆为降额后空间电压矢量轨迹。

图5 Ta1、Ta2、Ta6同时故障拓扑重构图Fig.5 Topology reconstruction of device fault Ta1、Ta2、 Ta6

图6 Ta1、Ta2、Ta6同时故障空间矢量分布图Fig.6 Space vector distribution of device fault Ta1、Ta2、Ta6

图7 A相降额运行后的空间矢量分布图Fig.7 Space vector distribution of derating operation in phase A
2 自适应容错控制算法
由上述分析可知,针对不同故障类型,需采用不同的容错拓扑重构方法。由于传统离线控制算法主要采用针对不同故障类型建立对应的容错拓扑重构算法和PWM控制策略间的映射关系表,当面向多相多管复合故障时,由于各种故障类型的组合多达上千种,由此建立的映射表规模庞大;且对一些非预期故障根本无法进行容错。为此,提出了一种基于组合逻辑的自适应容错控制算法。如图8所示,该算法主要包括拓扑重构开关信号生成模块、容错控制开关状态表生成模块和PWM输出控制模块三部分。根据不同故障类型和故障位置,实时求解并获得合适的容错重构开关驱动控制信息,生成有效的容错控制开关状态表,继而输出PWM控制信号,实现故障的实时容错控制。

图8 自适应容错控制算法结构图Fig.8 Structure diagram of adaptive fault-tolerant control algorithm
下面将阐述各个模块的算法设计及原理。为便于描述和分析,以下符号和变量将在下文被使用:
Fkp:第k相第p个IGBT开关管故障标志位,1为发生故障,0为正常。
Ck1、Ck2:第k相双刀双掷开关的动头1、2的动作信号,1为动头处于位置2,0为动头处于位置1。
Bku、Bkd:第k相上、下两个双向晶闸管驱动信号,1为驱动导通,0为驱动关断。
Dku、Dkd:第k相上、下两个单向晶闸管的驱动信号,1为驱动导通,0为驱动关断。
FTkp:重构拓扑中第k相第p个IGBT的开关状态,1为导通,0为关断。
STkp:等效的ANPC标准拓扑中第k相第p个IGBT的开关状态,1为导通,0为关断。
为了便于讨论和表达,规定k的取值为0、1、2、3、4,分别表示C相、A相、B相、C相、A相,例如k=1表示A相,则k-1表示C相,k+1表示B相;p=1,2,3,4,5,6。
2.1 拓扑重构开关信号生成模块
该模块主要根据故障类型和故障位置生成容错拓扑重构方案,计算求解出拓扑重构开关所需的触发动作信号,以实现逆变器拓扑重构。重构开关信号共有三类:双刀双掷开关动作信号、双向晶闸管和单向晶闸管驱动信号。其中双刀双掷开关的动作信号根据内管故障情况而定,双向晶闸管的驱动信号根据外管故障情况而定,单向晶闸管的驱动信号则由复杂多内管故障情况而定,不同的故障类型有可能求解出相同的拓扑重构方案。三类开关动作信号逻辑的推导与求解过程如下。
2.1.1 双刀双掷开关动作信号求解
双刀双掷开关的动作信号仅与内管故障有关。用FIMk=Fk2+Fk3表示k相主桥臂内管是否发生故障,用FICk=Fk5+Fk6表示k相钳位内管是否发生故障,其中“0”表示无故障,“1”表示故障。则内管故障的容错逻辑为:
IfFIMk=0,thenCk1Ck2=00;
IfFIMk=1&FICk=0,thenCk1Ck2=11;
IfFIMk=1&FICk=1,thenCk1Ck2=10。
根据逻辑对应关系,同时综合考虑具有更高优先级的单向晶闸管驱动信号,因为一旦单向晶闸管动作则双刀双掷开关必须保持初始状态,故可得Ck1、Ck2的逻辑表达式为:
Ck1=FIMk=(Fk2+Fk3)&
(1)
(2)
2.1.2 双向晶闸管驱动信号求解
当发生外管故障时,可控制双向晶闸管利用相间共享外管进行容错。由于拓扑重构后多个桥臂共用同一个外管,需要综合考虑其他桥臂的故障情况来确定容错重构方案。下面以k相上桥臂双向晶闸管Tku为例推导其驱动信号的逻辑表达式。根据k相上桥臂外管Tk1是否发生故障,分两种情形分别讨论。
情形1:若k相上桥臂外管Tk1故障,即Fk1=1,此时上桥臂双向晶闸管一定参与容错,即Bku=1。
情形2:若k相上桥臂外管Tk1未故障,即Fk1=0,表明此时定是在k相以外的其余两相上桥臂发生外管开路故障。根据外管故障可能发生的位置,进一步分析如下:1)若k-1相发生故障,则k相上桥臂外管Tk1需要参与容错,即Bku=1;2)若k+1相发生故障,则k相上桥臂外管Tk1不需要参与容错,即Bku=0;3)若两相同时发生故障,则非故障相外管同时承担三相上桥臂外管的输出,这种情况下Bku必然符合上述两种条件的至少一种,所以一定导通。
综上可知,共有两种情况需要上桥臂双向晶闸管参与容错,由此可得其驱动信号Bku的逻辑表达式为
(3)
同理,可得下桥臂双向晶闸管驱动信号Bkd的逻辑表达式为
(4)
2.1.3 单向晶闸管驱动信号求解
当发生双管故障中第⑤类双内管故障后,使用双刀双掷开关无法使故障相得到健康的两个主桥臂内管,需要触发对应的单向晶闸管导通将故障主桥臂内管短路,与续流二极管一起构成电流的双向通路。因此单向晶闸管的驱动信号比双刀双掷开关和双向晶闸管动作信号具有更高优先级。由此可得单向晶闸管驱动信号Dku、Dkd的逻辑表达式分别为:
Dku=Fk2&(Fk5Fk6);
(5)
Dkd=Fk3&(Fk5Fk6)。
(6)
2.2 容错控制开关状态表生成模块
当逆变器进行拓扑重构后,桥臂输出特定电平所对应的IGBT开关状态也会发生改变,如何确定一组可用的开关状态是容错控制要解决的一个关键问题。容错控制开关状态表生成模块根据容错拓扑重构方案以及三类拓扑重构开关动作信号,生成有效的IGBT开关状态表来控制电平输出。
具体操作过程为:1)根据故障类型和故障位置,排除故障开关管后,随机生成一组基于重构拓扑的IGBT开关状态表;2)对拓扑重构信息进行融合,根据重构开关动作信号,将重构拓扑的开关状态经过变换等效成标准ANPC三电平逆变器的IGBT开关状态;3)通过与标准拓扑开关状态表进行匹配比较,判断当前给定的重构拓扑开关状态是否符合要求,校验能否正确输出对应电平,若能则表明步骤1)中随机生成的基于重构拓扑的开关状态表有效,否则返回执行步骤1)继续求解。
上述步骤2)主要依据重构拓扑中IGBT开关管在第k相输出电平时的作用进行开关状态表的等效转换,使重构拓扑中的每一个IGBT开关状态均可通过组合逻辑等效转换成标准三电平ANPC拓扑的某一IGBT开关状态。下面推导并给出各IGBT开关状态等效转换的逻辑表达式。
在进行开关状态转换前,需先对拓扑重构开关的动作信号进行预处理。其中单向晶闸管驱动信号Dku、Dkd仅作用于部分复杂内管故障,且动作后锁定Tk2和Tk3为主桥臂内管,因此内管和钳位管控制信号不需要改变,该动作信号对容错控制开关没有影响;而双向晶闸管(上桥臂)驱动信号以及双刀双掷开关动作信号的功能如表2和表3所示。
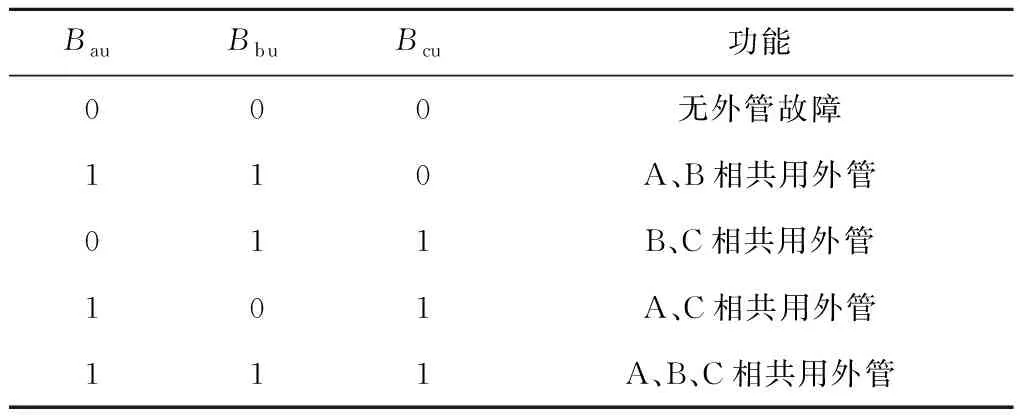
表2 Bku不同组合及其功能

表3 Ck1和Ck2不同组合及其功能
由此可见,若设FTkp为重构拓扑中第k相第p个IGBT的开关状态,STkp为等效转换后标准ANPC拓扑中第k相第p个IGBT的开关状态,以外管Tk1为例,等效转换后的开关状态STk1受到以下3个因素的影响:1)受拓扑重构前Tk1开关状态FTk1的影响。若FTk1=1,则STk1=1。2)受双向晶闸管开关状态的影响。由表2可知,双向晶闸管的开关状态决定了是否有外管被多相桥臂所共用,例如TauTbuTcu=110,则A、B两相共用外管Ta1或Tb1,故可得STa1=STb1=FTa1+FTb1。3)受双刀双掷开关工作状态的影响。由表3可知,一般的,双刀双掷开关的两个动头会同时处于位置1或2;当发生无法容错故障必须降额运行时,两个动头会分别切换至位置1和2,此时,故障相输出被直接连接至直流母线中性点,该相所有的IGBT均处于关断状态。
综上分析,可得等效转换后Tk1的开关状态表达式为
STk1=((FTa1Bau+FTb1Bbu+FTc1Bcu)×
(7)
同理,可以推导出其他IGBT开关状态的等效转换逻辑表达式,如表4所示。在容错拓扑重构中,根据上述推导而出的开关状态等效转换关系,可将重构拓扑中每个IGBT开关状态转换成相应的等效开关状态,再将此与表5所示的标准ANPC三电平拓扑的开关状态表进行匹配比较,若等效转换后的开关状态为表5的子集,则当前给定的重构拓扑开关状态表是可用的,否则需要重新给定。

表4 开关管等效转换逻辑表达式

表5 标准ANPC三电平逆变器开关状态表
2.3 PWM输出控制模块
PWM输出控制模块是在传统SVPWM控制策略的基础上,根据不同故障类型确定不同的SVPWM容错算法,生成相应的容错用空间电压矢量序列,继而产生不同的PWM输出脉冲。根据不同容错方案对逆变器输出性能的影响,可采用以下3种PWM控制算法。
1)对称全额运行模式。用于控制单管故障、①,③,④,⑤类双管故障、部分相间多管故障等大部分故障类型,容错后三相均工作于三电平状态,三电平SVPWM控制算法不变,采用传统三电平SVPWM算法。
2)不对称工作模式。用于控制②类双管故障和部分相间多管故障,容错后故障相工作于两电平,其余两相工作于三电平,最大调制比不降低,采用不对称三电平SVPWM控制算法[15]。不对称三电平SVPWM控制算法采用五段式脉冲序列。
3)降额运行模式。用于控制无法有效容错的部分相间多管故障,通过双刀双掷开关直接将故障相连接至直流母线中性点,其余两相工作于三电平状态,最大调制比降为0.5,采用两电平SVPWM控制算法[16]。
3 仿真与实验
3.1 自适应控制算法仿真验证
为了验证所提容错拓扑和控制算法的有效性和可行性,首先使用MATLAB/ Simulink搭建了器件共享型ANPC三电平逆变器容错拓扑主电路仿真模型。
首先设置故障标志矩阵Fault_info=[0 0 0 0 0 0, 0 0 0 0 0 0, 0 0 0 0 0 0 ]用来表示18个IGBT故障标志,其中1表示故障,0表示正常;以矩阵BTTs[ ]表示6个双向晶闸管动作信号,以矩阵Cons[ ]表示双刀双掷开关6个动头的动作信号,以矩阵TTs[ ]表示6个单向晶闸管动作信号。接着对双刀双掷开关、双向晶闸管以及单向晶闸管的动作信号进行求解,输出动作标志矩阵;然后将Fault_info,BTTs,Cons,TTs矩阵信号作为输入变量求解出开关状态表LookupTable,它包含根据重构信息得出的27个矢量所对应的开关状态信号;最后匹配比较并确定LookupTable是否有效。
下面以A相发生故障为例,检验自适应控制算法在各类故障下的计算结果。
3.1.1 单相两外管故障
Ta1、Ta4发生开路故障时Fa1=Fa4=1,函数输入变量为Fault_info=[ 1 0 0 1 0 0,0 0 0 0 0 0,0 0 0 0 0 0],求解得到双刀双掷开关、双向晶闸管以及单向晶闸管的动作信号如下:
BTTs=[1 1 1 1 0 0];Cons=[0 0 0 0 0 0];TTs=[0 0 0 0 0 0]。
分析所得矩阵可知,对应双向晶闸管驱动信号B1u、B2u、B1d、B2d为1,动作为导通闭合,双刀双掷开关、单向晶闸管未发生动作,即A、B两相共用上桥臂外管Tb1及下桥臂外管Tb4。根据前文分析,该重构结果满足对应故障容错的拓扑重构需求。
图9所示为该故障下开关状态表的求解结果。左侧矩阵为重构拓扑的开关状态表,右侧矩阵为将其等效转换为标准ANPC拓扑的开关状态表。观察A相输出P,N,O三种电平时的开关状态(图中分别由方框圈出并标记),可以看出,左侧矩阵第1、4列始终为0,表明故障器件Ta1、Ta4处于开路状态。在A相信号上叠加B相外管Tb1、Tb4的开关状态信号,即得右侧等效矩阵,其中A相的N电平为[1 0 1 1 0 0] [0 0 1 1 0 0 ],O电平为[1 0 1 0 0 1] [0 1 0 1 1 0],P电平为[1 1 0 0 0 0],均为表5子集。因此可判断左边矩阵为可用矩阵。

图9 Ta1、Ta4故障下重构拓扑的开关状态表及其等效转换Fig.9 Switch state of reconfiguration topology and its equivalent transformation of device fault Ta1、Ta4
3.1.2 单相内外两管故障
Ta1、Ta3发生开路故障时Fa1=Fa3=1,函数输入变量为Fault_info=[ 1 0 1 0 0 0,0 0 0 0 0 0,0 0 0 0 0 0],求解得到双刀双掷开关、双向晶闸管以及单向晶闸管的动作信号为:BTTs=[1 1 0 0 0 0],Cons=[1 1 0 0 0 0],TTs=[0 0 0 0 0 0]。
分析所得矩阵可知,双向晶闸管动作信号B1u、B2u为均1,处于闭合状态;双刀双掷开关Sa的动头打到位置“2”。即A、B两相共用上桥臂外管Tb1,功率器件Ta1、Ta4、Ta5、Ta6变成主桥臂,功率器件Ta2、Ta3起到钳位作用。由前文分析可知,该重构结果满足对应故障容错的拓扑重构需求。
图10所示选取开关状态表中3个典型开关状态进行分析,可以看出,左侧矩阵中第1、3列始终为0,表明故障器件Ta1、Ta3处于开路状态。在A相信号上叠加B相外管Tb1的开关状态信号,并交换A相第2、5列及第3、6列,即得右侧等效矩阵,其开关状态均为表5子集。因此可判断左边矩阵为可用矩阵。

图10 Ta1、Ta3故障下重构拓扑的部分开关状态表及其等效转换Fig.10 Switch state of reconfiguration topology and its equivalent transformation of device fault Ta1、Ta3
其它故障类型的计算过程与上述故障均类似,此处不再赘述。
3.2 故障容错控制仿真
由于逆变器三相对称,以A相故障为例,共模拟了4种故障容错,其中单管故障1种,相内双管复合故障1种,相间多管复合故障2种。相应的仿真参数如表6所示,仿真时均假设t=0.02 s时发生故障,t=0.04 s时投入容错。

表6 系统仿真参数
3.2.1 单管故障
图11为A相外管Ta1发生开路故障后的容错过程示意。由图可见,当发生外管故障后,故障期间A相无法正常输出“P”电平,当负载电流过零后,A相输出出现持续的“O”电平,同时A相负载电流开始发生畸变,0.04 s容错投入后,B相外管Tb1代替Ta1,A相输出恢复正常。

图11 外管Ta1开路故障容错过程Fig.11 Fault-tolerant operation of single-device Ta1 open-circuit fault
3.2.2 相内双管故障
图12为A相内外双管发生开路故障后的容错过程示意。由图可见,当Ta1、Ta3发生故障后,故障期间A相无法正常出“P”电平,输出电流为正时,A相被强制输出“O”电平;电流衰减到零后,由于Ta3故障,无法输出“N”电平,A相输出电平被强制拉高,同时影响B、C两相输出电流失衡。0.04 s容错投入后,外管Tb1被A、B两相共享,Ta5、Ta6取代Ta2、Ta3成为主桥臂内管进行输出,采用不对称SVPWM控制策略进行输出,容错后三相输出电流恢复平衡。

图12 相内双管Ta1、Ta3开路故障容错过程Fig.12 Fault-tolerant operation of double-device Ta1、Ta3 open-circuit fault in one phase
3.2.3 相间复合多管故障
图13(a)、(b)分别为发生相间四管和五管开路故障后的容错过程示意。由图13(a)可见,由于A、B、C三相均有IGBT故障,所以故障期间三相都无法正常输出,同时三相电流畸变较大,每相故障特征与对应的单管或双管故障类似;0.04 s进行容错控制后,三相输出电压和输出电流都恢复正常,能够在不降低系统输出性能的情况下使系统恢复三相三电平对称输出。由图13(b)可见,当A相同时发生三管故障后,故障期间A相输出波形与Ta2、Ta6故障时相同,这是因为Ta2管一旦故障同时影响“P”、“O”电平的输出,从而覆盖了Ta1管的故障特征;B相由于Tb2管故障也无法输出“P”电平,同时受A、B两相电流影响,C相电流畸变严重。在进行容错拓扑重构时,由于无论如何重构A相均无法输出双向可控的“P”电平,无法求解到有效的拓扑重构和开关状态表,因此只能降额容错运行,控制双刀双掷开关将A相直接连接到直流母线中性点,采用退化SVPWM控制策略进行输出,A相输出恒定的“O”电平,B、C两相正常输出三电平,牺牲故障相电压输出,保证三相电流的对称输出。

图13 相间多管开路故障容错过程Fig.13 Fault-tolerant operation of multi-device open-circuit fault among three phases
上述各仿真结果表明所提容错控制方法具有容错各类开关管开路故障的能力。
3.3 实验结果
为了对上述诸多仿真结果进行实验验证,搭建了器件共享型容错ANPC三电平逆变器小功率实验系统。如图14所示,实验系统主电路中IGBT采用Infineon公司的两单元模块FF75R12RT4,控制电路中DSP控制板采用TI公司的数字信号处理器TMS320F28335。具体实验参数为:直流母线电压Ud=96 V,直流侧电容C1=C2=750 μF,负载电阻阻值为2.5 Ω,负载电感为13.8 mH,载波频率为1 250 Hz,三相输出电压基频为50 Hz,调制比m=0.8。

图14 实验系统实物图Fig.14 Hardware of experimental system
图15为A相Ta1发生开路故障后,在投入容错前后逆变器三相输出电压波形。设置故障发生时刻起运行两个基波周期后投入容错控制,由图可见,容错投入后,A相输出恢复正常,其他相输出也未受任何影响,与仿真结果一致。

图15 Ta1单管故障容错过程三相输出电压波形Fig.15 Output voltage waveform of three phases when tolerating single-device fault Ta1
图16为Ta1、Ta3发生开路故障后,投入容错前后逆变器三相输出电压波形。从图中可以看出,容错投入后,故障相电压恢复三电平或两电平运行,非故障相仍保持三电平输出,与仿真结果一致。

图16 Ta1、Ta3双管故障容错前后三相输出电压波形Fig.16 Output voltage waveform of three phases when tolerating double-device fault Ta1、Ta3
图17为Ta1、Ta2、Tb1、Tc2多个开关管同时发生开路故障后,投入容错前后逆变器三相输出电压波形。由图可见,容错投入后,三相输出电压均恢复正常,能够在不降低系统输出性能的情况下使系统恢复三相三电平对称输出,与仿真结果一致。由此表明,所提容错控制方法对于此类相间多管故障,可以实现三相全额容错运行。

图17 Ta1、Ta2、Tb1、Tc2相间多管故障容错前后三相输出电压波形Fig.17 Output voltage waveform of three phases when tolerating multi-device fault among three phases Ta1、Ta2、Tb1、Tc2
图18为Ta1、Ta2、Ta6、Tb2、Tc2多个开关管同时发生开路故障后,投入容错前后逆变器三相输出电压波形。由图可见,容错投入后,控制双刀双掷开关将A相直接连接到直流母线中性点,同时采用降额SVPWM控制策略,可使A相恒定输出“O”电平,B、C两相恢复正常运行,与仿真结果一致。进一步表明所提容错控制方法对于此类相间多管故障容错的有效性。
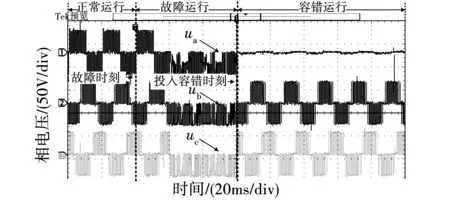
图18 Ta1、Ta2、Ta6、Tb2、Tc2相间多管故障容错前后三相输出电压波形Fig.18 Output voltage waveform of three phases when tolerating multi-device fault among three phases Ta1、Ta2、Ta6、Tb2、Tc2
4 结 论
本文以ANPC三电平逆变器为研究对象,提出了器件共享型ANPC三电平逆变器容错拓扑,并提出了基于组合逻辑的自适应容错控制算法,通过仿真和实验可得到如下结论:
1)本文所提容错拓扑可在不降低逆变器输出性能的条件下对单管、相内双管以及相间多管开路故障进行容错,器件利用率高,冗余成本较低。
2)本文所提自适应容错控制算法能够根据故障位置实时求解拓扑重构所需的各类重构开关动作信号,生成等效开关状态表,能够适应复杂的故障模式,具有实用价值。
3)本文所搭建的降功率实验系统实验结果与理论分析和仿真结果一致,验证了本文所提出的容错拓扑以及算法的有效性。
猜你喜欢
建材发展导向(2021年7期)2021-07-16
中国外汇(2019年10期)2019-08-27
青年歌声(2019年2期)2019-02-21
中国实用神经疾病杂志(2018年9期)2018-05-25
知识经济·中国直销(2017年11期)2017-11-28
中国公路(2017年16期)2017-10-14
化工设计(2017年2期)2017-03-05
石油化工(2015年9期)2015-08-15
电气传动(2015年4期)2015-07-11
电源学报(2015年6期)2015-02-18
