
智能物料搬运机器人结构设计
2021-08-16 16:53张余龙邱夏东胡晓靖田祖祎
中小企业管理与科技·上旬刊 2021年8期
关键词:机械手
张余龙 邱夏东 胡晓靖 田祖祎


【摘 要】针对小型轻型物料搬运的市场需求,一款智能物料搬运机器人被设计出来。论文主要讨论了其机械结构部分的设计,包括总体布局、底座、车轮及机械手等,并建立三维模型和物理样机。样机试行过程中,运行平稳,物料不易脱落,表明设计方案可行,可为物料搬运机器人的结构设计提供参考。
【Abstract】In view of the market demand of small and light material handling, an intelligent material handling robot is designed. The paper mainly discusses the design of its mechanical structure, including the overall layout, the base, the wheel and the manipulator, and establishes the three dimensional model and physical prototype. During the trial run of the prototype, the operation is stable and the materials are not easy to fall off, which shows that the design scheme is feasible and can provide reference for the structural design of material handling robot.
【关键词】物料搬运机器人;麦克纳姆轮;机械手
【Keywords】material handling robot; Mecanum wheel; manipulator
【中图分类号】TP242.6 【文献标志码】A 【文章编号】1673-1069(2021)08-0185-02
1 引言
智能搬运机器人是指以嵌入式为控制基础,由电池提供能源,具备移动载物、自动导航、安全保护、路径规划等功能的无人搬运车[1]。智能搬运机器的设计与生产,集合了材料、机械、微处理器、智能算法等多个领域,涉及广泛的科学技术应用[2]。随着人类社会需求的发展,人力成本的上升,智能搬运机器人在日常的生活和工作领域起到越来越重要的作用。
在商业和物流活动中,小型和轻型的物料在数量方面占据的份额最大[3]。因此,搬运机器人的相关研究一直受到业界重视。首台搬运机器人由Barret公司于20世纪50年代研制成功[4]。随着伺服驱动技术的成熟和计算机的普及,促进了控制系统技术的进步,不同类型的搬运机器人开始出现在市场上。1968年诞生了首台智能机器人,其具备自主感知和行为规划等功能。21世纪,搬运机器人向专业化、智能化、集成化的方向发展。如图1所示的MiR200机器人集成多重功能,最高负载可达200kg,并安装定制不同模块,如货架、举升装置、传送带甚至是协作机器人手臂来实现不同任务需求,并且可以识别障碍,规划路径,实现自主安全运行。
国内搬运机器人的发展虽稍晚于国外,但产品及相关研究成果丰富。20世纪80年代,很多研究院所和高校开始研究搬运机器人,相继研制出功能各异的搬运机器人。1991年,新松机器人公司和沈阳自动化研究所研发的搬运机器人系统用于汽车装配線。2018年,米克力美成功研发了无轨导航搬运机器人DZ-80,应用于物流自动化搬运系统中,如图2所示。总体而言,国外的搬运机器人研究起步早,技术成熟;国内搬运机器人产业也在蓬勃发展,潜力巨大,应用前景广泛。
本文提出了一款智能物料搬运机器人,主要讨论其机械结构部分的设计,主要包括底座、车轮、物料抓取机械手及总体布局等。
2 智能物料搬运机器人的主要零部件设计
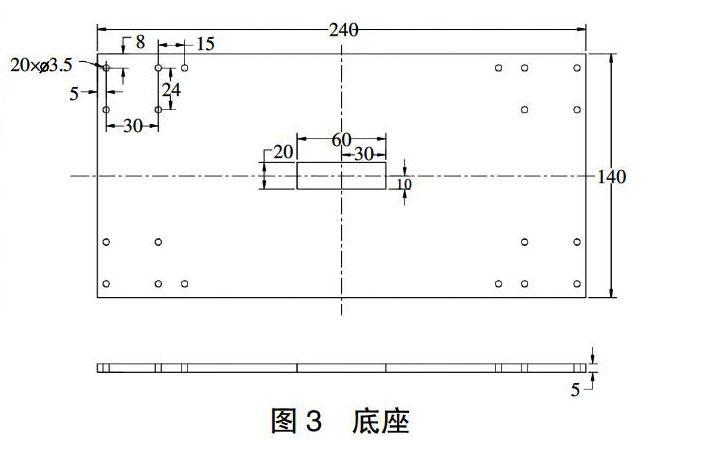
2.1 底座
底座是搬运小车的主要支撑部件,为提高小车运行时的平稳性,需保证底座具有足够的刚度,考虑到能效比,要求底座质量较小,故底座材料选用双层形亚克力板,设计为长方形结构有利于小车多向运动的稳定性、空间足够布置芯片、电路与机械抓手等其他零部件。底座设计简图如图3所示。
2.2 车轮
控制物料搬运小车稳定运动的难点在于机械臂较长,在行驶过程中机械臂会一直抓取着物料,若地面有轻微的不平整或者小车的动作幅度较大,都易导致小车重心的变化,从而增大物料脱落的可能性。选用4个麦克纳姆轮,可实现全方位的移动,能避免小车进行转向、掉头等大运作时发生倾倒。麦克纳姆轮的三维模型与实物如图4所示。
麦克纳姆轮不同的安装方式对小车的运动也有不同的影响,采用图5所示的安装方式,可以实现前后左右方向的平移,同时能使小车实现顺时针与逆时针的旋转运动。
麦克纳姆轮工作时,通过四轮之间的速度差来改变小车的速度和行进方向,小车车身红外传感器反馈路径信息,通过红外传感器的值可以确定小车车身在路线上的情况,再结合麦克纳姆轮的运动学分析,计算小车各个轮胎的速度,控制小车循迹。当四个驱动轮同时向前或向后运动时,小车可实现向前或向后运动;当轮1和轮3向前运动,轮2和轮4向后运动时,小车向左平移;当轮1和轮3向后运动,轮2和轮4向前运动时,小车向右平移。
当小车沿着X轴平移时:V1=-VxV2=+VxV3=-VyV4=+Vy (1)
当小车沿着Y轴平移时:V1=VyV2=VyV3=VyV4=Vy (2)
当小车做定轴旋转运动时:V1=+ω(a+b)V2=-ω(a+b)V3=-ω(a+b)V4=+ω(a+b) (3)
式中:Vx:小车X轴方向移动速度,以X轴正方向为正;Vy:小车Y轴方向移动速度,以Y轴正方向为正;ω:小车沿几何中心定轴旋转角速度,以逆时针方向为正;V1:轮1转速;V2:轮2转速;V3:轮3转速;V4:轮4转速;a:底座长度;b:底座宽度。
2.3 抓取机械手
2.3.1 机械臂
机械臂是搬运小车的核心部位,通过机械臂的运动,小车可以在无需移动的情况下,抓取不同位置的物料。采用五轴关节型机械臂,机械臂各关节的运动均为转动副,分别由五台舵机控制,舵机之间由四个U形架连接整合。U形架为镂空设计且其材质为铝合金,在保证机械臂刚度的同时可以减轻机械臂重量,减少机械臂在运动时产生的转动惯量,使小车在移动过程中更加平稳。U形架两侧增加一个滑动副,通过调整其相对位置而改变机械臂长度,使机械臂活动更加灵活,加大工作范围。
2.3.2 机械爪
机械爪由机械手指、传动装置、驱动装置组成,机械爪由一个舵机驱动,通过齿轮传动控制机械手指张开和闭合,机械手指与齿轮为分体式结构,通过螺栓连接固定,便于依据物料形状拆卸更换机械手指,使机械手指与物料紧密贴合,使抓取更加稳定。
3 物料搬运小车的总体布局
物料搬运小车的硬件部分,主要有机械爪、五个机械臂舵机、六只U形架、一个云台与云台舵机、四只麦克纳姆轮、四个灰度传感器、一个摄像头以及主控面板与底座,其总体布局如图6所示,物理样机图如图7所示。物理样机结构紧凑,运动平稳,在实际运行过程中,未发生物料脱落现象。
4 结语
本文对物料搬运小车的机械结构进行了分析,主要包括底座、车轮、物料抓取机械手及总体布局等。物理樣机可平稳实现直线运动、转向、加减速等功能,表明设计方案可行。
【参考文献】
【1】缪志强. 自主移动机器人运动控制与协调方法研究[D].长沙:湖南大学,2016.
【2】孙智超. 基于 ROS 的室内轮式自主运输机器人解决方案[D].成都:西南交通大学,2017.
【3】段立峰.电子商务物流废弃包裹对环境污染的影响研究[J].环境科学与管理,2020,45(09):94-98.
【4】 Townsend, William. The Barrett Hand grasper-programmable flexible part handling and assembly[J]. Industrial Robot An International Journal,2000,27(3):181-188.
猜你喜欢
南北桥(2022年4期)2022-06-25
机电工程技术(2021年3期)2021-09-10
环球时报(2019-07-18)2019-07-18
百科知识(2018年9期)2018-05-28
科学与财富(2018年7期)2018-05-21
现代职业教育·中职中专(2018年7期)2018-05-14
劳动保护(2017年5期)2017-06-12
科学启蒙(2015年9期)2015-09-25
中国水运(2014年3期)2014-04-14
科技致富向导(2013年8期)2013-05-30
