基于机器视觉技术的提升机箕斗机械闭锁装置智能分析系统及应用
2021-09-10 07:22姜绍军王新刚闫刚董永智郝付强
黄金 2021年3期
姜绍军 王新刚 闫刚 董永智 郝付强
摘要:针对蚕庄金矿采用底卸式双侧挂钩机械闭锁出现的箕斗出曲轨后不能准确复位、卡箕斗和导向轮松动移位甚至脱落等故障,设计研发了一种基于机器视觉技术的提升机箕斗机械闭锁装置智能分析系统。详细介绍了该系统的工作原理、系统组成和主要功能等。现场应用表明:该系统具有处理智能化、速度快、精度高、稳定性好的优点,实现了同类设备非接触式实时在线监测,对同类设备的安全生产有着极为重要的现实意义,兼顾了经济效益和社会效益,推广应用前景较好。
关键词:提升机;箕斗;机械闭锁装置;智能化;挂钩检测;机器视觉技术
中图分类号:TD679文章编号:1001-1277(2021)03-0052-04
文献标志码:Adoi:10.11792/hj20210310
引言
箕斗提升运输具有作业效率高、提升量大等优点,是目前国内外大中型矿山普遍采用的一种运输方式。箕斗在运行过程中,需要挂钩勾住箱体,确保箱体不会因罐道或滚轮罐耳的影响而发生偏摆,导致箱体内物料倾泄井筒,从而发生严重的安全事故。目前,行业内尚无箕斗挂钩啮合可靠性的统一标准。招金矿业股份有限公司蚕庄金矿(下称“蚕庄金矿”)徐家疃矿区位于山东省招远市蚕庄镇,明主井箕斗负担将井下矿(废)石提升至地面的任务。该提升系统选用JKM4.5×6ZⅢ型多绳摩擦提升机,提升高度为797.5m,单提升容积为24m 3,采用底卸式双侧挂钩机械闭锁箕斗,目前在用箕斗自2014年4月10日开始使用,已提升矿(废)石量达119.65万t。由于使用时间较长,运行中曾多次出现因落石或箕斗机械闭锁装置旋转轴承磨损及箕斗箱体水平位移超标导致的在出曲轨后不能准确复位、卡箕斗与个别导向轮松动移位甚至脱落等故障,给安全生产带来极大风险。目前,国内已有多起底卸式箕斗因挂钩闭锁不严或失效导致矿石倾倒井筒,造成井筒装备破坏严重,直接或间接损失巨大。因此,针对上述问题,蚕庄金矿开发了一种基于机器视觉技术的提升机箕斗机械闭锁装置智能分析系统,取得了较好的应用效果。
1箕斗闭锁装置故障原因分析
经过工程技术人员现场踏勘,发现日常生产中,影响箕斗闭锁机构不到位的原因主要有以下幾种:
1)箕斗导向轮固定螺栓因锈蚀或撞击导致导向轮变形或脱落。
2)箕斗底部托轮短曲轨处由于矿粉或矿石长时间堆积,导致卸载完毕后不能按原路径返回完成与挂钩底板闭锁的动作。
3)箕斗闭锁装置导向轮磨损严重或轴承部位底盘变形使其旋转不灵活,卸载完毕导向轮出曲轨后未能完成卸矿舌板与斗箱闭锁。
4)箕斗挂钩静态部分挂孔有小块矿石或结块矿石进入,使得挂钩动态部分导向轮出曲轨后,静态动态相结合时,配重轮重力不能将挂孔内矿石碾碎或砸出,长时间累积形成较硬块状。
5)箕斗斗箱顶部主轴作为斗箱卸矿或复位时的支撑点,由于润滑不到位或矿粉进入,当磨损量超标时,亦会造成斗箱倾斜,致使舌板卸载完毕复位时难以准确与挂钩闭锁。
上述隐患中,极易形成重大设备事故的是箕斗机械闭锁装置失效(出曲轨后挂钩未能有效复位),挂钩未能挂住箱体,如继续高速下放,箕斗挡板可能随时张开,造成斗箱倾斜,砸坏井筒内电缆、风水管路、钢梁等;还可能在箕斗装矿后高速提升时受力变形张开致使矿石掉落于井筒中,使尾绳损伤或断裂。提升机在高速运动过程中,箕斗将与井筒设施撞击,提升机电控系统瞬间产生巨大电流,冲击主电动机和传动系统,造成重大事故。除此之外,近年来随着箕斗使用年限的迫近,与箕斗运行相关的机械部分因磨损腐蚀等原因带来的故障和影响生产效率的现象越来越多。由于这些事故在日常生产中具有突发性、随机性,如果不能及时发现,及时解决,将对安全生产造成不可估量的损失[1]。
为避免上述情况导致生产事故的发生,近年来各矿山企业陆续采用在相应部位安装光电开关、磁控开关、麦克风,甚至采用摄像头由专人观察等对策,但由于误差过大,恶劣环境影响,极易损坏,维护量过大和成因的不确定性,经常导致漏判或误判,效果不甚理想[2-3]。因此,亟需开发一种智能化、精度高、稳定性好的提升机箕斗闭锁装置。
2提升机箕斗机械闭锁装置智能分析系统
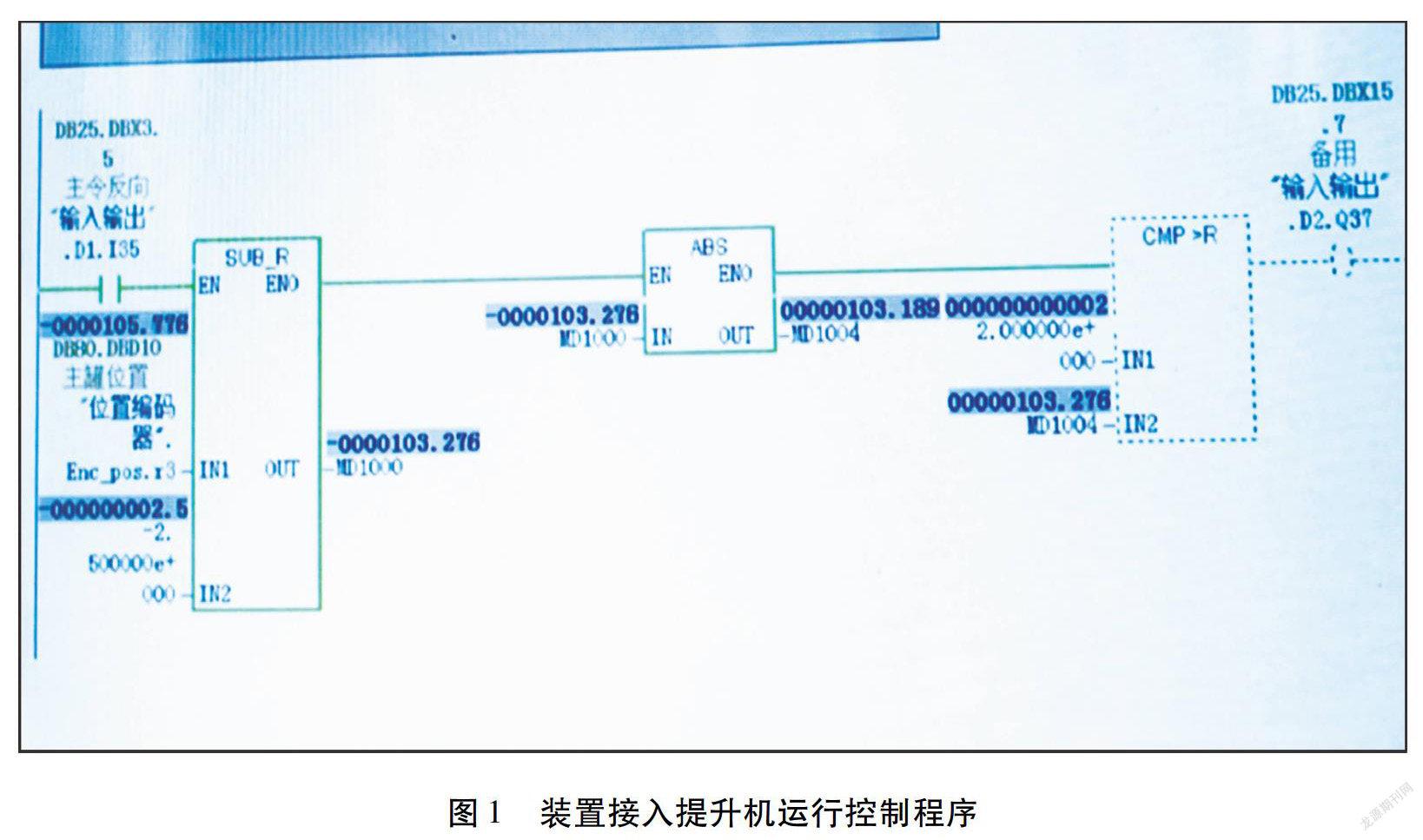
结合当下成熟的技术手段,创新性引入智能化装备,开发了基于机器视觉技术的提升机箕斗机械闭锁装置智能分析系统。该系统与提升机运行控制系统连接,替代人工完成对箕斗闭锁装置非接触式在线实时监测,即当两侧挂钩插入深度未达到容忍度或卡箕斗时立即报警(可接入安全回路)。该系统可同时间接分析箕斗在卸矿出曲轨后,导向轮、卸矿轮的运行状态及箕斗机械闭锁装置的旋转轴承磨损程度和箕斗挡板上下转轴与轴套的磨损程度(见图1)。
2.1工作原理
机器视觉是一门涉及诸多领域的新兴学科,涵盖新兴物理学、计算机科学、人工智能、神经生物学、图像处理和模式识别等内容[4]。它利用物理机器模拟人的视觉功能,从客观事物的图像中提取有用信息,加以处理和理解,最后用于工程测量和控制。
传统意义上的工业机器视觉系统由照明光源、光学成像和图片捕捉系统、图像处理模块、决策判断系统及机电执行机构组成。
由于蚕庄金矿箕斗卸矿后下放时,发生较大的抖动和运动轨迹偏离、日夜环境光源发生急剧变化和箕斗机械闭锁装置本体水渍严重等诸多因素使得目前所有机器视觉算法失灵,调试过程中多次误判、漏判。为此,发明了单相机分时多特征点复目匹配算法和自定义双坐标修光纠偏除水渍算法。此外,现场洒水、漏矿导致不足8h工业相机镜头表面污损过多,无法正常判断。为防止漏矿、落石堵塞机械闭锁静态部分挂孔,研发了防尘机械臂和斗箱防护帽、溜矿槽,将上述4种结构有机结合组成提升机箕斗机械闭锁装置智能分析系统。该系统速度快、信息量大、功能多,抗干扰能力强,不受现场环境、箕斗运行速度、斗箱晃动影响,与环境光源无关,与被检测物体沾水、矿粉、泥沙无关。经过近半年的投用,取得了预期效果。提升机箕斗机械闭锁装置智能分析系统工作流程为:
1)当箕斗机械闭锁装置运动到接近拍摄视野中心时,传感器向图像采集控制部分發送信号(触发脉冲)。
2)图像采集控制部分根据控制程序,在指定区间分别向相机、光源照明系统和防尘机械臂发出启动脉冲。
3)其中一个启动脉冲使相机停止目前的扫描,打开曝光机构或事先在程序中设定曝光时间,然后重新开始新一帧的扫描并输出。
4)将采集的箕斗运动图像存储到工控机内存中。
5)工控机程序对图像进行实时处理、分析和识别,并输出监测结果。
2.2系统组成
提升机箕斗机械闭锁装置智能分析系统主要由6个子系统组成:
1)数字图像处理系统(专用算法软件)。
2)光学成像与光源照明系统。
3)传感器与数字视频系统。
4)DSP自动化控制系统。
5)故障记录与图像保存查询系统。
6)光纤传导与PLC处理系统[5]。
2.3系统功能
提升机箕斗机械闭锁装置智能分析系统可在创建模型时采用2种新发明算法设定箕斗机械闭锁装置缝隙啮合程度,利用工业相机获得缝隙图像,通过图像处理,可快速准确地提取缝隙尺寸,并由工控机辅助评判系统给出监测结论;亦可设定允许斗箱发生水平位移幅度,在线监测时,如有超标,系统可通过软件智能分析Ⅰ、Ⅱ、Ⅲ类故障并在机柜显示屏与操作台信息提示屏做出相应提示,以方便操作人员进行故障查询和故障复位。
1)允许挂钩挂好程度、水平位移程度均可设定。例如:4.0cm高度挂钩允许1.5~2.0cm轻微未挂好,6.5cm宽度水平位移允许2.0~3.0cm轻微横向位移。
2)创建模型一键式设定,简单易操作,现场人员可轻松掌握,且模型只需创建一次,完成一次操作后无论现场断电或通讯故障,将故障复位后都可继续投用,无需重新创建。
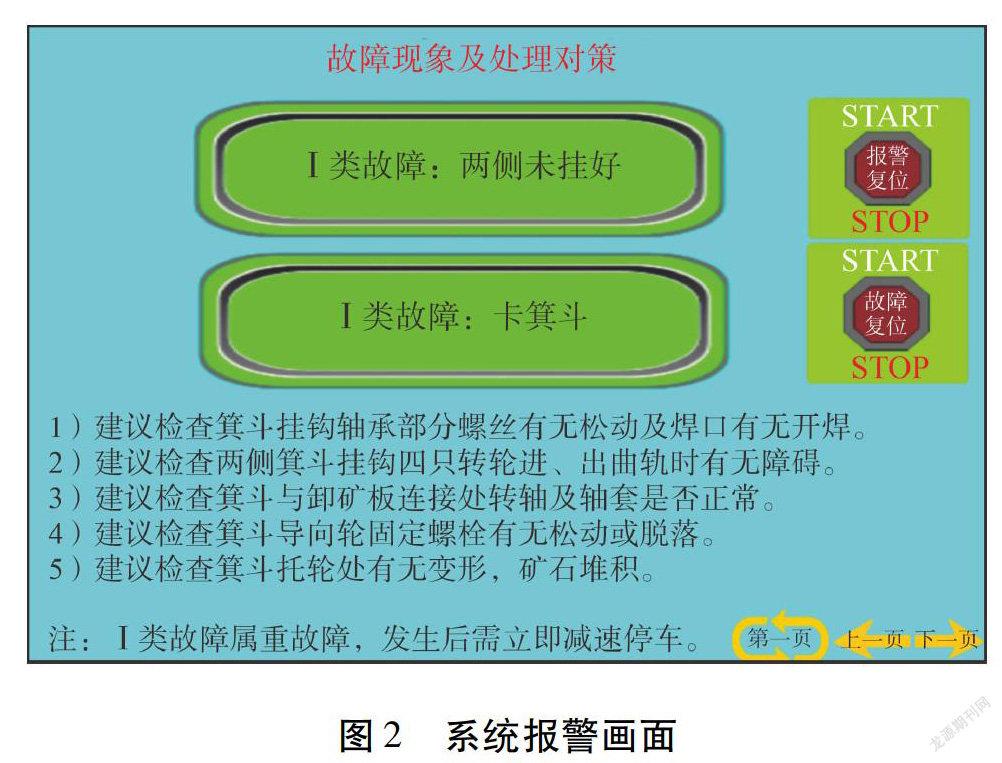
3)具备完整的“声光+语音报警”及“故障分析与处理对策”体系,将故障分为Ⅰ、Ⅱ、Ⅲ类,且伴随相应故障语音提示加声光报警。①Ⅰ类故障有两侧挂钩均未挂好、卡箕斗等,属重故障,需立即实施安全制动,发生后卷扬机工需立即停车,停车后相关人员可按触摸屏常见故障分析及处理对策进行检查与维修(见图2)。②Ⅱ类故障有单侧挂钩未挂好等,属较重故障,若无连续发生则允许本次提升完毕后停车检查。③Ⅲ类故障有箕斗位移,属轻故障,若连续发生则本班人员可按故障提示单元处理对策留意观察。
各类故障均可选择性投入卷扬机安全回路。例如:Ⅰ类故障自动停车;Ⅱ类、Ⅲ类仅提示,不参与停车。
历史报警记录最多可追溯100d,记录历史报警的年/月/日/时/分/秒,以及故障类型、内容,并将箕斗挂钩报警时的形态以图片形式存储至硬盘,以便查询。现场具备外网或WIFI前提下,在手机端下载云APP,可随时随地监控现场实时运行状态、查看历史故障记录等。适配光电传感器在相应位置监测提升机是否在卸矿后下放中卡箕斗。
2.4系统应用
基于机器视觉技术的提升机箕斗机械闭锁装置智能分析系统自2020年5月投用至今,共捕捉到箕斗两侧挂钩均未能复位6次,单侧挂钩未能复位25次,箕斗箱体水平位移超标数百次,分析出导向轮松动故障3次,单只脱落故障1次,准确率100%。
基于机器视觉技术的提升机箕斗机械闭锁装置智能分析系统的成功研发投用实现了同类设备非接触式实时在线监测,在避免重特大设备事故发生的同时也为应急抢修和日常检修计划的制定提供了有针对性的可靠依据。
该装置不仅能够准确地分辨出箕斗挂钩状态,还能监测到箕斗导向轮进入曲轨的状态,同时也能对箕斗底板密封漏料情况进行观察,及时掌握箕斗底板密封情况,便于合理安排检修时间。
3结语
基于机器视觉技术的提升机箕斗机械闭锁装置智能分析系统,由于其处理智能化、速度快、精度高、稳定性好等诸多优点而成为在矿山提升系统中应用的最佳选择,对同类设备的安全生产有着极为重要的现实意义,兼顾了经济效益和社会效益,推广应用前景广阔。
[参考文献]
[1]郝彩霞.竖井提升系统危险因素分析及三维风险度评价[D].长沙:中南大学,2008.
[2]秦强.大吨位箕斗曲轨卸载技术研究[J].煤炭工程,2004(1):64-68.
[3]付本庆.主井箕斗卸载方式的技术改造[J].煤炭机械,2009,30(5):155-157.
[4]唐宇慧,杨敏,刘其洪.基于机器视觉的机械零件直线边缘精确检测[J].机床与液压,2004(12):188-189,206.
[5]金武飞.矿井直流提升机电控系统的研究与应用[D].北京:机械科学研究总院,2011.
Abstract:Inviewofthefailurethattheskipcannotbeaccuratelyresetaftergettingoutofthecurvedrail,andthattheskipandtheguidewheelloosensupandshiftsorevenfalloff,whenthebottomunloadingdoublehookmechanicallockingskipisadoptedinCanzhuangGoldMine,anintelligentanalysissystemformechanicallockingdeviceofhoistskipbasedonmachinevisiontechnologyisdesigned.Theworkingprinciple,compositionandmainfunctionsofthesystemareintroducedindetail.Thefieldapplicationshowsthatthesystemhastheadvantagesofintelligentprocessing,highspeed,highprecisionandgoodstability,andrealizesnoncontactrealtimeonlinemonitoringofsimilarequipment,whichisofgreatpracticalsignificancetothesafeproductionofsimilarequipment.Thesystemtakesintoaccountbotheconomicandsocialbenefits,andhasabroadprospectofpromotionandapplication.
Keywords:hoist;skip;mechanicallockingdevice;intellectualization;hookdetection;machinevisiontechnology
猜你喜欢
现代职业教育·高职高专(2022年14期)2022-05-01
电子乐园·上旬刊(2022年5期)2022-04-09
课程教育研究(2021年9期)2021-04-13
中国化工贸易·中旬刊(2020年5期)2020-11-06
造纸信息(2019年7期)2019-09-10
福建基础教育研究(2019年1期)2019-09-10
福建基础教育研究(2019年1期)2019-05-28
山东工业技术(2019年6期)2019-03-27
科学与财富(2018年4期)2018-04-19
进出口经理人(2018年1期)2018-01-24