
家庭服务机器人现状与展望
2021-09-10 07:22毛志贤朱晓龙韦建军王春宝刘铨权段丽红王同罗承开张广帅王玉龙龙建军林焯华
机电工程技术 2021年2期
毛志贤 朱晓龙 韦建军 王春宝 刘铨权 段丽红 王同 罗承开 张广帅 王玉龙 龙建军 林焯华





关键词:家庭服务机器人;信息感知;路径规划;人机交互;仿人
0引言
人工智能作为新一轮引领技术革命的前沿技术,正在颠覆行业、产业的生产方式,也正在改变人类的生活方式,如图1所示。服务机器人作为人工智能技术的最佳载体之一,正在向家居、餐饮、客服、物流、医疗、教育等多个行业渗透,2016年全球家庭服务机器人销售额为25.8亿美元,销量为670万台,占服务机器人销售额比重由15.4%提升到35.4%。几年前,家庭消费者感受不到家庭服务机器人给日常生活带来的便利,而如今广大消费者接受了家庭服务机器人这个概念词,快速使用家庭服务机器人产品。地面清洁机器人地宝、自动擦窗机器人窗宝、空气净化机器人等已经进入家庭,辅助人类完成清洁卫生、物品搬运、家电控制、家庭娱乐、病况监视、儿童教育、报时催醒、电话接听等任务。NA0机器人仿人的外形,可实现人机互动,具有治愈抑郁症儿童的功能,但是功能较单一。某公司的Roomba清洁机器人可对家庭中的各个区域地面进行清洁,缓解了人类做家务的劳累,但清洁机器人只是实现了清洁的单一功能,没有实现多功能的集成和人机交互。扫地机器人承担了简单的家庭劳动工作,但缺少了情感交互。而Robv-Mini机器人集成了人工交互技术,提高了机器人的趣味性,满足人类更多的需求。工业机器人之父约瑟夫·恩格尔伯格认为家庭服务机器人进入家庭是一种必然的趋势。
2020年2月4日,工信部发布了《充分发挥人工智能赋能效用协力抗击新型冠状病毒感染的肺炎疫情倡议书》,中国掀起了大规模的AI抗疫热潮。危机中蕴藏着机遇,疫情期间,因为病毒的凶猛,更多的场景需要无人化,自动设备和机器人可以替代人上“战场”。今年春节期间爆发的疫情,因为病毒传染性强,一线工作人员十分危险,这是一个非常适合AI机器人的应用场景。而家庭服务机器人的端茶送水、监控、人机交互等基本功能则可以代替一线工作人员给感染住院患者做引导与基本护理,共同加入这次疫情战役,在提高效率的同时,还可以降低一线工作人员感染新型冠状病毒的风险。
1研究现状
家庭服务机器人根据智能化程度和用途分为初级小家电类机器人、幼儿教育娱乐类机器人和人机互动式家庭服务机器人。家电清洁安防类机器人可实现智能除尘功能,新松保安机器人、iRobi等安防类机器人可以检测家中煤气、水龙头是否关闭,将检测结果以邮件的形式发送给主人,有效实现了“看家”功能。乐乐勇智能、小杜等教育类机器人可以代替忙碌的父母辅导孩子学习,娱乐机器人可以可以缓解成年人下班回到家中的疲劳感,成为人类生活中的灵魂伴侣。
1.1初级小家电类机器人
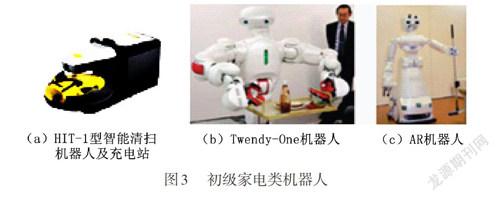
家电类机器人不仅可以有效实现防盗监测和电气煤气安全检查等安防功能,而且可以替代人完成清洁卫生、家电控制等家电服务工作,如图2~3所示。
世界上最早的一台家庭清洁机器人RC3000,其机构设计扁平,能够移动到床、沙发、茶几等家具的下部进行清洁工作,当遇到障碍物时,机器人可以利用自身配置的光电传感器和芯片改变本身的角度,继续执行任务。基站作为RC3000机器人的一部分,通过向机器人发射红外定位和导航信号,告知机器人目的地的路径。
扫地智能服务机器人HIT-1,根据配置的嵌入式智能特点,使得该机器人清扫的面积较大。该机器人的智能体现在可以根据自身电量不足自主到充电站充电,减少了人们更换电池的烦恼,当电量充满之后,继续回到原来的位置进行清扫工作嗍。
東京早稻田大学与20多个公司合作研制的成功仿人机器人“Twendy-One”,“Twendv-One”有8个手指,全身布满传感器和控制性肌肉,肢体动作非常灵活和熟练,人类通过一个摇杆控制机器人将残疾人抬到床上、从烤箱取面包等动作,该机器人成本较高。
帮手机器人“AR”(Assistant Robot)接近人类体型,能根据褶皱区分衣物,有效集成了洗衣机、送餐、拖地的功能。
清洁家电类机器人从初始的单一清洁功能逐渐向褶衣服、从烤箱取面包的复杂功能转变,从仿人的角度出发,设计具有灵活双臂的家居服务机器人,可有效提高机器人为人类服务的效率。
1.2幼儿教育娱乐类机器人
幼儿教育娱乐类机器人一方面可以代替忙碌的父母教育和监督孩子,另一方面可以为人类带来情感上的娱乐和放松。幼儿教育娱乐类机器人如图4~5所示。
“irobi”家用服务机器人可以利用自身配置的检测设备检测大门是否上锁和煤气是否已经关闭,当家里儿童想学英语或者韩文的时候,irobi机器人可以带领孩子一起念书,另外机器人可以给哭闹的孩子讲故事和唱儿歌。2017年,某公司团队研发的布丁豆豆机构外观设计可爱美观,深受孩子们喜欢凹。布丁豆豆机器人是一款双语学习机器人,可通过头部的识别装置快速识别并复述图书内容,减少儿童的压力,提高儿童的注意力。
华硕小布机器人外表萌宠,科技时尚感强,磨砂的触感温柔舒适,一方面保持了小布机器人的可爱,另一方面也保证了孩子们的安全。小布的头部通过一根灵活而坚固的金属关节与身体接触,而且通过内部智能电机驱动,可以做出很多灵活的头部动作,使其显得更加活灵活现。小布背部还有紧急开关的保护盖、防跌落传感器、超声波距离传感器等部件,机身两侧是驱动轮,尾部是转向轮,驱动轮周围配备柔光RGB灯效。脸部安装的支持10点触控的触摸显示屏在与人互动时可以表现丰富的表情。
360儿童机器人利用大数据搜索和语音交互功能陪伴孩子们的成长,给孩子们带来欢乐,该机器人具备摄像机拍摄的功能,利用动听的童歌哄睡小孩,同时还可以为父母教育儿童,陪伴孩子学习。商用机器人“优友”,不仅可以实现教育孩子的功能,还可以代替父母看管孩子,同时可以给一些咨询人员带来答案,实现咨询导购的功能。
在孩子教育方面,教育机器人Nao不仅可以实现教育功能,还可以在众人瞩目下轻松自如地踢球,给大人和小孩带来无限的欢乐,成为人类娱乐的产品,Nao机器人还可以像人类一样在开放式编程框架下跳舞等。
1.3人机互动式机器人
人机互动式机器人在服务机器人领域中是非常重要的,人际互动的好坏直接影响机器人与用户的交流,人际交互由初始的简单界面的交互到情感情绪肢体交流的交互,人机交互机器人如图6所示。
“小Q机器人”可用于中国妈妈对孩子的早期教育,也可成人用来自身娱乐,让机器人成为人们的在线生活伴侣。该机器人具备时效性的通讯技术,加强了父母与孩子的沟通,促进孩子与父母的亲情,小Q机器人凭借自身配置的机器人智能技术,可以展示丰富、生动的表情动作,同时依靠语音人机交互技术提高用户的使用兴趣,与腾讯QQ结合,成为人们的线上生活伴侣。
北理研制的“汇童”BHR和浙大研制的Wu&Kong仿人机器人可以像人类一样连续地打乒乓球,对打次数高达110回合,在机器人与人对打时,最高回合度比机器人之间的对打度高30个回合,在这样高回合度对打的情况下,促进了传感、伺服、驱动控制技术的发展。
2014年,日本软银集团和法国Aldebaran Robot-ics联合推出全球首款配备情感识别功能的机器人Pepper,Peper机器人可以根据身上配置的麦克风、摄像头和3D传感器可以识别人的一些表情动作,比如人高兴的表情、愤怒的表情均可识别出来;不仅如此,Peper机器人在面对人类的这些情绪时,可以与人类进行一些互动,做出一些反应。
Willow Garage实验室研制出的PR2机器人,可以实现人机交互,通过使用文字和声音指令来做早餐的PR2厨房机器人像人类一样,该机器人有2只手臂、7个关节,灵活度很高,可以打开冰箱取东西;当机器人电量不足时,可以给自己找充电器充电,还能根据说明书制作咖啡。但是机器人的尺寸很大,而且其价格也非常昂贵。
上海某公司研发的陪伴型服务机器人维拉机器人是老年人的一款福利,老年人可以利用该机器人获得生活上的帮助,还可以通过机器人查询需要的信息和一些日程计划。浙江某公司研发的陪伴机器人阿铁,具备36种仿人交互表情来满足老年用户需求的差异,具备看护、娱乐互动及简单的在线医疗咨询等服务功能。该机器人不仅可以提醒老人吃药,实现智能化,还能以不一样的视觉效果呈现在老年人面前,提起老年人的兴趣。该机器人的人机交互界面可以进一步改善,丰富机器人对语言的识别性,高效识别老年人的情感,实现机器人和老人的深入互动。
2关键技术
家庭服务机器人是多种技术的融合和体现。需要掌握关键技术的3~4种才能进入这个市场,包括人工智能、语音识别与合成技术、解析与交互技术、导航及定位技术、机器人跟随技术、机器人多机调度技术、机器人底盘技术。以下将重点阐述信息感知、路径规划和人机交互技术。
2.1信息感知技术
家庭服务机器人具备3个特征:感知、决策和执行。机器人信息感知技术是人机互动功能实现的基础,重点研究方向是多传感器信息融合技术,通过将视觉、听觉、触觉等传感器的信息相互融合,使机器人可以达到最优的感知能力。传感器有内、外部传感器之分,内部传感器的主要功能是是检测跟踪机器人自身的状态,内部传感器包括里程计、加速度计、陀螺仪等;外部传感器是用于机器人以外的感知,外部传感器包括超声波传感器、激光测距传感器、视觉传感器。
人类可以看见外面世界的颜色,感觉高铁的速度等,这些信息是通过视觉、触觉、听觉和嗅觉等感知世界的结果,其中约80%的信息是由视觉获取的,可见,视觉器官是人类最重要的感知器官。同樣,机器人视觉是机器人中重要的功能,也是机器人感知世界的核心技术。
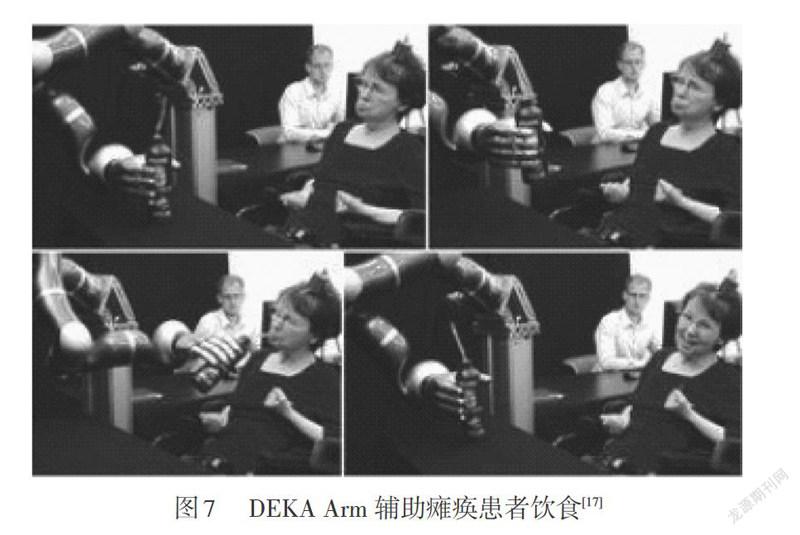
智能认知与感知是机器人与人、机器人与环境进行交互的基础,其中脑生肌电认知、城市环境下移动机器人对环境的感知与识别以及智能空间是智能认知感知技术的3个技术。在脑生肌电认知方面,研究人员希望通过脑波、肌肉神经信号帮助残疾人士解决生活上的细节问题,比如操作智能轮椅、假肢等器具以辅助行走。功能假肢DEKA Arm项目团队介绍了通过建立一种神经界面将大脑皮层神经活动翻译成能够操纵辅助装置的控制信号,从而帮助瘫痪者提高独立生活能力。同时也证明了长期瘫痪或中枢神经受到损伤的人可以使用神经信号实现控制复杂装置的功能,如图7所示。Rebsamen等利用脑电波控制轮椅移动,规划已知环境特定目标的路径,而对于用户只是集中有限数量的目标,从而用户可以降低因为注意力过度集中而引起的疲劳,轮椅移动的正确率也得到了提高。
2.1.1视觉感知信息处理
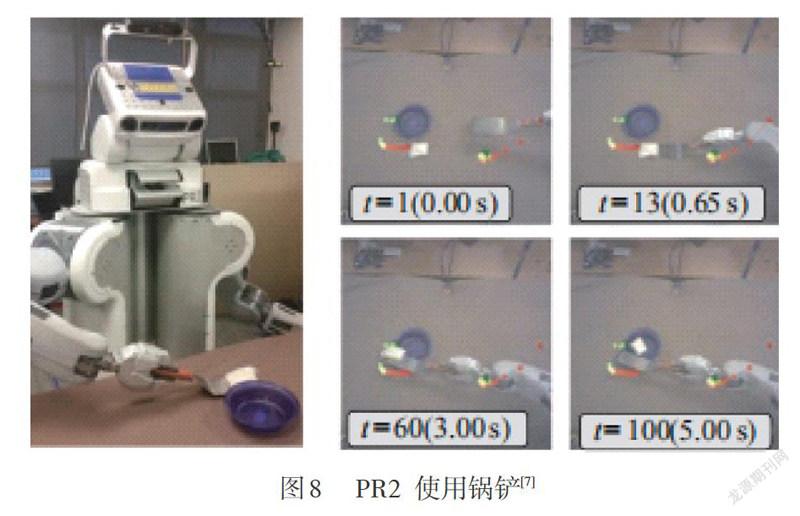
传感器技术的发展可以促进机器人感知信息的能力,机器人传感器根据感知信息的不同分为视觉传感器、力觉传感器、触觉传感器、接近觉传感器、距离觉传感器、姿态觉传感器、位置觉传感器。通过研究机器人视觉这一门单独的学科,研究者可以解决机器人技术的复杂性,人一机一环境交互系统基于视觉感知信息处理。PR2机器人在非结构化环境可以开冰箱取饮料基于PChitta等利用的视觉图像处理方法,PChitta等不仅应用了二维、三维的视觉图像处理方法,还将触觉信息、关节力矩、位置信息列入确定机器人自身状态的标准。Elliott等通过三维点云、图像分割、K均值聚类等方法可以使PR2机器人识别出不同的的物体,实现抓取物体的功能。PR2机器人可以像人类一样将煮饭需要的米倒入锅中,这个功能的实现基于Finn等提出的方法,这种方法是通过相机拍摄下来的图像自动构建状态空间,该机器人是通过深度空间自动编码器实现对周围环境的感知,实现对机器人的控制功能,并利用此方法控制PR2用锅铲将一小袋米放入锅中。如图8所示。
机器人iCub可以将触觉和手、眼同时利用起来,实现手、眼协调的功能,该机器人可以完成复杂的肢体动作,同时对外界的感知也较强,具有人与环境交互的功能,机器人可以使用语言和基本的一些动作与人进行友好地交互。机器人Jibo属于家庭社交型的一种机器人,可实现较多的功能。当人类觉得无聊时,它会像人类一样与人类进行交流,让人类觉得自己是和一个真实的人聊天;同时,该机器人还可以帮人类解决全家福拍照的问题,有效地担任了家庭助理一职。
2.1.2非视觉感知信息处理
对于非视觉感知信息处理,人类可以根据力觉感受外界对我们施加力的情况,通过触摸外界的事物感受物体的材质,这些力觉、触觉等都属于非视觉感知。对于机器人而言,非机器人视觉的信息处理是由非视觉传感器处理的,比如超声波传感器和激光传感器。超声波传感器和激光传感器的作用对象是最小环境模型,这个最小环境模型是属于室内标识的,根据这些最小环境模型能够得到最高效率的信息,比如得到环境的结构化特征,这种结构化特征中直线和墙的特征对应,角和凸角特征对应,实现机器人对外界环境的识别,在环境特征中,重要的是机器人对环境识别的准确性和稳定性,对于环境特征的选取和阐述,就显得不是很重要。Hough变换法的使用在直线特征提取这一方面研究得较为透彻,但是对于栅格大小的选择方面就会比较困难,除此之外,Hough变换法的算法不是很完美,没有将噪声和不确定性带来的影响考虑在算法中,导致参数估计不准确。丁刚等进行一些实验证明了支持向量机的有效性和实用性,同时识别率和泛化能力也得到了研究者的肯定,识别率和泛化能力都较高,此次实验的成功在于研究者将超声波获取到的周围环境信息视为环境特征,以六维特征向量表达周围的环境,之后将这些信息实现机器人对环境的识别。另外室内外结构化环境可以在多超声波传感器的作用下视为凸角、墙角等,除此之外周围随处可见的物体也可在多超声波传感器的作用下视为墙角、通道等,在对环境建模时,可以使用线段匹配的方式,这些例子的使用在文献中可以体现出来。于金霞等对感知的环境信息进行特征提取,通过对提取信息的研究,遗传聚类算法应运而生,遗传聚类算法的有效性在于金霞等人的研究下得到了证实。
2.2路径规划
路径规划技术是根据选择路径最短或运算时间消耗最短等指标,选择一条最优或者次优的避障路径。路径规划最本质的问题是在几个约束条件下解出最优解。路径规划方法可以分为2种类型,第一种是全局地图信息的路径规划,第二种是局部地图信息的路径规划,第二种路径规划也可以叫做局部路径规划,这2种路径的分类是依据环境信息的已知程度来划分的。
在传统的起始点一目标点的路径规划路径算法中,常用的有路线图方法、单元分解法、势场法、萤火虫算法和遗传算法。家庭服务机器人中,扫地机器人、窗宝机器人、搬运机器人实现简单的扫地擦窗搬运功能,路径规划避障是主要的关键技术。然而传统的起始点一目标点的路径规划并不适用于清洁扫地、擦窗等任务,扫地机器人和擦窗机器人最优的算法已不再是传统仿人起始点一目标点算法所能满足的,而是通过覆盖路径算法实现,这种算法可以使机器人有效避开含障碍物的地方,高效顺利完成任务。
2.3人机交互技术
人机交互技术指的是通过设备和界面完成给定交互任务的具体方法。家庭服务机器人中,目前主流的人一机交互方式有听觉控制、视觉控制、力触觉控制。手势识别、表情识别、身体运动识别(如识别跌倒、跑步等动作)、人的检测和跟踪、图像显示(如显示笑脸或者用户要求的信息)等是基于视觉的例子应用。基于听觉的控制例子主要有语音识别、非語音识别(如识别哭泣、尖叫、开门声音、走路声音等)、语音输出、故事朗读、歌曲播放、铃声提醒等。语音识别技术是近年来信息技术领域的重要科技之一,语音识别技术从文字表面意思看,针对对像主要是语音,语音信号可以转化为人们熟悉的文本文档,语音转化为文档是通过一种技术实现,这种技术就是编码技术,编码技术可以将机器人识别不了的语言转化为机器人能够识别的语言,从而实现对机器人的控制,实现人机交互。
触屏触摸感应的人机交互方式是基于力触觉的控制。另外脑电交互红外感应也属于人机交互的2种方式。
人机交互方式各种各样,但对于不同类型的家庭服务机器人需要选择最优的人机交互方式。Reem这类服务机器人因为工作环境的不同,所以对这类机器人交互方式的要求就比较高,面对商场里各种各样的人,有的人喜欢用语音和机器人进行交流,有的人喜欢用手势和机器人进行交互,而有的人则喜欢通过触摸屏幕的形式和机器人交流,所以在设计这种商用机器人时,应该站在不同用户的角度考虑问题,使得人机交互方式更多更广,满足广大消费者的要求。而对于给予用户陪伴的机器人Pepper,人机交互方式应该更加丰富,比如可以和正在陪伴的用户进行情感上的交流,能够根据被陪护的人员表情做出回应。Twenty-One机器人一般在家里辅助主人做家务,与用户的交互十分密切,所以在完成家庭任务的同时,也需保证与主人的和谐相处,实现人机交互的有效性与安全性。
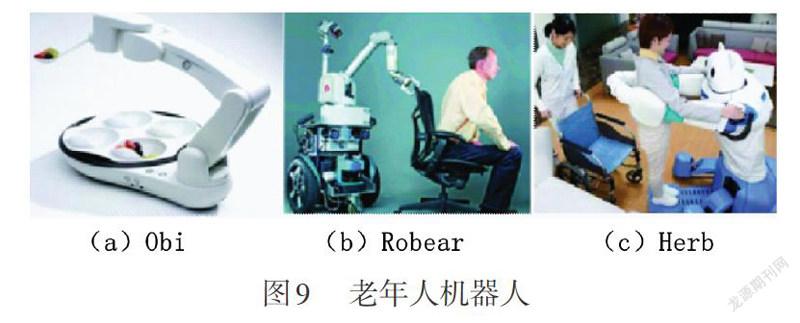
美国研制的0bi护理机器人,这款机器人可以辅助人类进食,照顾吃饭不方便的老年人或者残疾人。对于人机交互方面,该机器人的交互界面比较单一,但可以实现人与机器人的基本交互,对于不方便吃饭的用户可以利用人机交互机界面上的按钮,就可以控制机械臂以达到喂食的目的,如图9(a)所示。日本理化学研究所研制的Robear机器人像人类一样,配置有一双手,可以实现抱住用户移动的功能,动作娴熟,如图9(b)所示。美国卡耐基梅隆大学研制的Herb,在结构上有2个手臂,像人类的双手一样,能够实现众多的功能,除此之外还配置有2个移动的脚轮,根据自身配置的硬件设备可以实现机器人对周围环境的感知与识别,如图9(c)所示。
值得一提的是人机交互技术在教育娱乐机器人中是核心技术,人机交互方式变得越来越简单,可通过人的面部表情和情绪来实现人和机器人的互动,由最简单的界面交互到人脸识别的交互再到人思想的交互,机器人可以通过微表情知道用户的意图,研究思路逐渐向仿生角度出发,机器人的最高境界是使机器人具有人的思维,与人正常沟通交流,这就需要将多种技术互相融合,提高机器人人机交互的可靠性与成熟性。
3结束语
仿人服务机器人作为21世纪高技术制造业和现代服务业的重要组成部分,已成为衡量一个国家机器人技术水平的重要标志。仿人服务机器人有着良好的应用前景,正逐步向家庭服务、助老助残等领域迈进,仿人服务机器人有着像人类一样灵活的功能,朝着智能化、标准化等方向发展,从仿生材料、仿生外形和仿生思维出发,达到与人类各方面相近功能的目的,最终使得机器人可以适应更加复杂、非结构化的家居环境,高效率满足用户们的需要,所以家庭服务机器人可以从仿生的角度设计家庭服务机器人的本体结构和思维执行能力,具备人的思维执行决策能力的家庭服务机器人可以为疫情服务机器人的研制提供有效来源,本文对家庭服务机器人的未来发展趋势做出如下总结。
(1)机器人具有人形化的外观非常重要,这是与人类建立情感联系的基础,那些与人类相同的行为举止,才能触发人类的同理心,进而取得彼此的信任。在仿人机器人上需探究以下关键技术:①仿人机器人的机构设计;②仿人机器人的运动操作控制,包括实时行走控制、手部操作的最优姿态控制、自身碰撞监测、三维动态仿真、运动规划和轨迹跟踪;③仿人机器人的整体动力学及运动学建模;④仿人机器人控制系统体系结构的研究;⑤仿人机器人的人机交互研究,包括视觉、语音及情感等方面的交互;⑥动态行为分析和多传感器信息融合。
(2)需解决低成本和高精度的矛盾,家庭服务机器人面对的是家庭的非结构化的环境,对传感器的要求非常高。
(3)需解决传感器融合的技术矛盾,增加机器人传感器的数量可以提高它对环境的理解和任务决策,但却增加传感器误差和信息不完整的可能。
(4)需解决实时性与有限资源的矛盾,家庭服务机器人大多为小型化。
猜你喜欢
中国新通信(2016年22期)2017-01-13
科技创新导报(2016年23期)2016-12-23
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
电脑知识与技术(2016年26期)2016-11-24
计算机教育(2016年7期)2016-11-10
科技视界(2016年20期)2016-09-29
科教导刊·电子版(2016年17期)2016-07-16
