
绳索驱动型拟人机械手运动仿真
2021-09-10 07:22黄广伟陈浩华赵天婵张攀峰
机电工程技术 2021年2期
关键词:运动仿真
黄广伟 陈浩华 赵天婵 张攀峰

关键词:绳索驱动;拟人机械手;运动仿真
0引言
为满足肢体缺陷的人群对高仿真性且具有灵巧性的假肢或者替代人手执行危险工作的需求,诸多学者对拟人机械手进行了研究。宋钊杰、韩建海等通过基于仿生学相关理论提出了一种气压驱动扇形柔性关节仿人机械手;李红渊研究了一种基于Ar-duino语音控制的五指灵巧手,该研究主要针对于拥有说话能力的肢体缺陷人群,通过语音控制实现对目标物体的抓取;美国麻省理工学院和犹他大学联合研发了Utah/MIT拟人手;美国斯坦福大学研制了Stanford/PL拟人手;Huagen Wan等对手的外观做了细致纹理修饰,使其更逼真,并构建了几种抓取手势。
在诸多复杂抓取环境下,拟人手要成功抓取不同尺寸和形状的物品是较为困难的,为克服该缺陷,本文设计了一款在形态和功能上都与人手相近的绳索驱动型拟人机械手,并运用SolidWorks的Sim-ulaition插件以及ADAMS进行运动仿真。从仿真的结果来看,各个手指的指尖均出现速度、加速度跳变的情形,为了使拟人手的指尖从起始端到末端运动平稳,拟人机械手加减速的控制方法宜采用s型速度曲线控制算法,以有效解决机械手的速度、加速度跳变问题,优化各手指的整体运动形态的连贯性以及平滑性。
1擬人机械手总体结构设计
通过对人手结构人体工学的探索,合理简化了手部的自由度,人手是一个多肢节体系,大致包含手臂、手指、手掌和手腕4大部分。以人手结构为基础,结合人手部的实际及理论尺寸,运用Solid-Works构建了绳索驱动型拟人机械手的三维模型,其总体结构如图1所示,包括前臂、手腕、手掌、手指部分(拇指、食指、中指、无名指、小指)。
2拟人机械手运动学数学方程建立
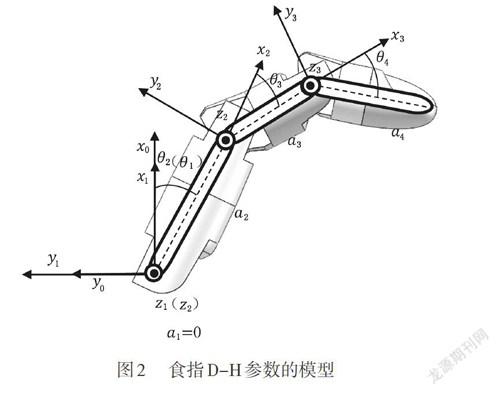
2.1运用D-H参数法建立坐标系
本文选用了食指为例进行分析,利用D-H描述法可得到其等价的D-H参数模型如图2所示。
2.2建立运动学方程
食指指节之间的坐标变化可以通过齐次坐标变换求出,两相邻指节坐标系间的齐次坐标变换矩阵如下式所示:
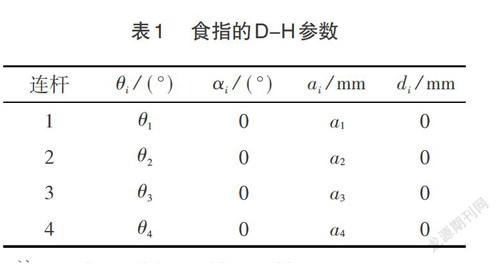
将表1中的参数代人式(1)中,则可求出各个坐标系的齐次坐标变换矩阵,如式(2)~(5)所示。
3拟人机械手的运动仿真
为了准确掌握五根手指指尖相对于掌心的运动轨迹、运动速度、运动加速度等变化规律,运用AD-AMS软件对拟人机械手进行了运动仿真。
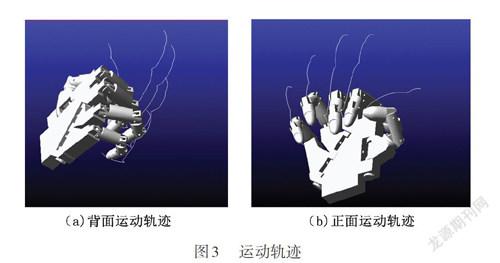
3.1运动轨迹
本文运用ADAMS软件在重力的作用下进行仿真分析。首先运用ADAMS插件Simulation仿真后获得拟人机械手动画界面;其次在动画界面中添加各个手指的指尖运动轨迹的追踪器;最后生成五根手指的指尖运动轨迹如图3所示。
3.2运动速度、运动加速度
拟人机械手的运动形态受多种因素影响,为简化分析过程,现选取各手指的指尖运动速度、运动加速度进行研究,分析其在没有绳索牵引约束情况下的指尖运动特性,为优化绳索驱动型机械手控制策略提供参考依据。
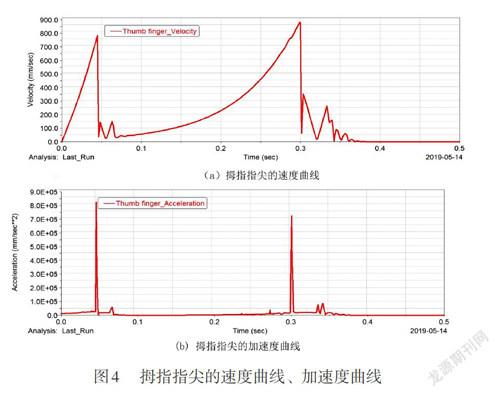
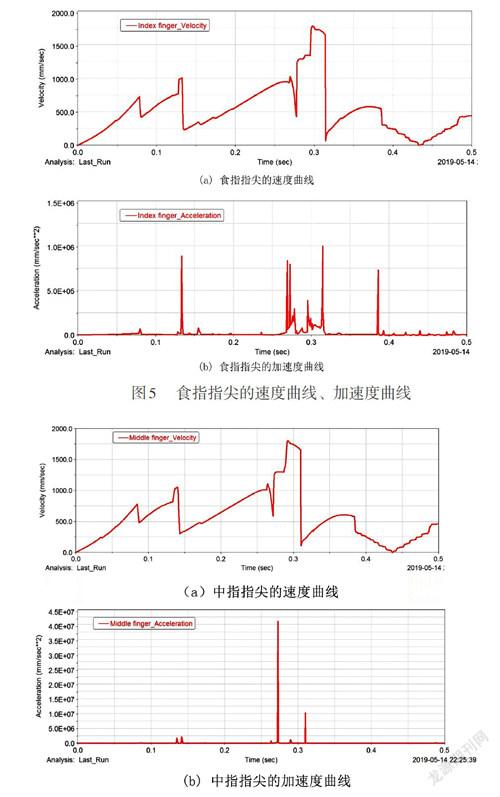
运用ADAMS插件Simulation生成五根手指指尖相关参数的Plot图解,根据Plot图解进行运动速度、运动加速度分析。可得出在一定时间内,拇指、食指、中指、无名指、小指相对于掌心的速度曲线、加速度曲线分别如图4~8所示。
由图4中可以看出,在0~0.5 s时间内,拇指指尖速度、加速度在0.05~0.1 s、0.2~0.3 s、0.3~0.4 s内有较小幅度跳变,变化较为平滑。而在0.05 s和0.3s时刻均出现了跳变,速度和加速度虽然连续,但不平滑。
由图5中可以看出,食指指尖在0.13s、0.27s、0.28s、0.3s、0.32s时刻出现速度和加速度的跳变。特别地,在0.27~0.28s短时间内出现2次跳变。
由图6中可以看出,中指指尖在0.07 s、0.12 s、0.13 s、0.24 s、0.28 s、0.32 s时刻出现速度和加速度的跳变,0.28 s、0.32 s时刻跳变程度远大于其他时刻。
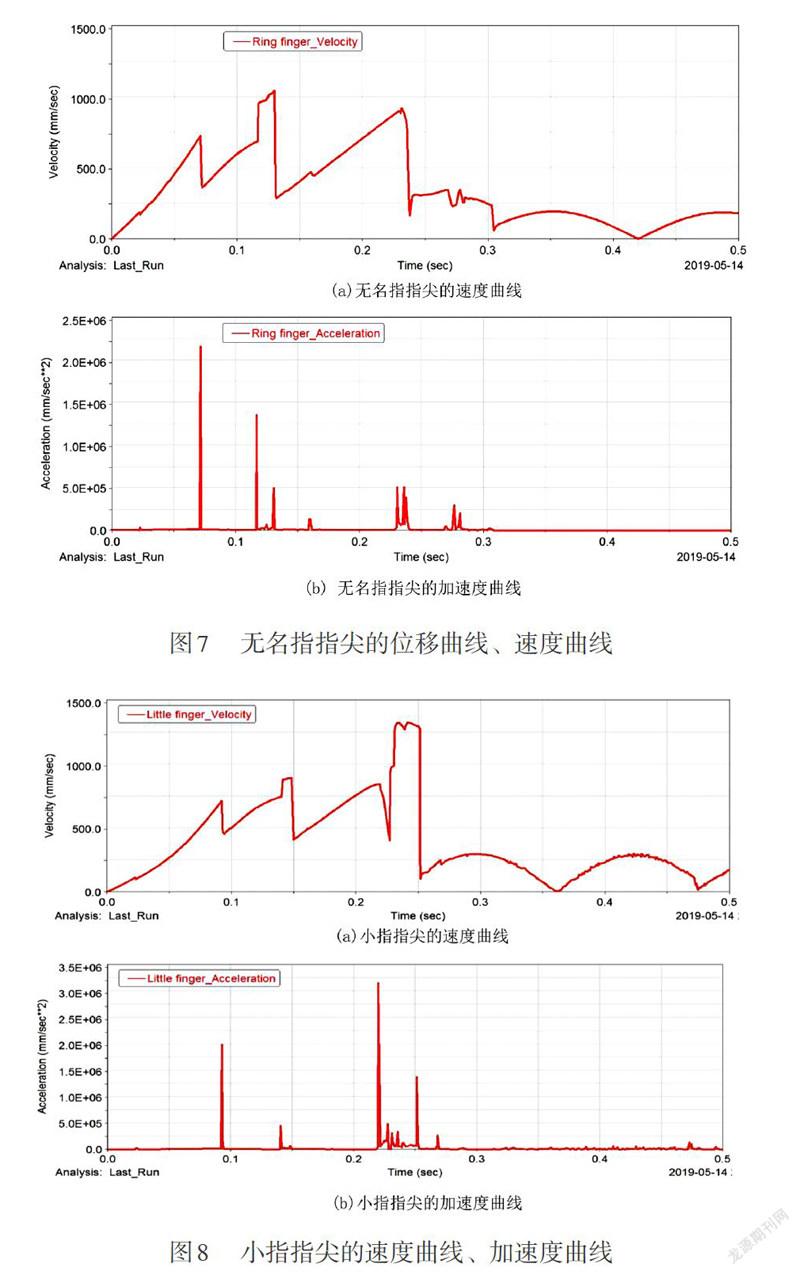
由图7中可以看出,无名指指尖在0.07 s、0.12s、0.13 s、0.24 s、0.28 s时刻出现速度和加速度的跳变,且0.07 s、0.12 s时刻跳变较其他时刻大。
从图8中可以看出,小指指尖在0.09 s、0.14 s、0.22 s、0.25 s时刻出现速度和加速度的跳变,其中0.09 s、0.22 s、0.25 s跳变幅度较其他时刻大。
综合分析图4~8所示的速度、加速度曲线,可以看出,启停时刻存在惯性力,势必会对拟人手本体造成冲击。此外,在运动过程中,各手指的指尖均出现速度、加速度跳变的情形,这样可能会导致手指的各个关节之间出现冲击或不可预料的振动,影响拟人手的工作质量和工作寿命。基于此,为了使拟人手的指尖从起始端到末端运动平稳,需要重点分析各手指指尖速度和加速度的跳变时间段和跳变程度,以对相应的过程进行加减速控制,从而达到各手指运动平稳的效果。
常用的加减速控制算法有梯形速度曲线控制算法、s型速度曲线控制算法、正弦加减速曲线控制算法。通过比较,s型速度曲线控制算法能够在不同阶段实现速度衔接平滑,能有效解决机械手的速度、加速度跳变问题,优化了各手指整体运动形态的连贯性以及平滑性。
4结束语
本文运用SolidWorks构建了拟人机械手的三维模型,使用ADAMS构建了虚拟样机并生成各手指的速度曲线、加速度曲线图。通过对各手指指尖相对于掌心的速度曲线、加速度曲线图对比分析可以看出,启停时刻存在惯性力,运动过程中,各个手指的指尖均出现速度、加速度跳变的情形,为了使拟人手的指尖从起始端到末端运动平稳,拟人机械手加减速的控制方法宜采用s型速度曲线控制算法,以有效解决机械手的速度、加速度跳变问题,优化各手指整体运动形态的连贯性以及平滑性。此研究不仅能缩短物理样机的创建周期,还为优化物理样机设计和控制方案提供有价值的参考依据。
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
教育教学论坛(2016年52期)2017-03-12
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代电子技术(2015年8期)2015-07-09
