采用参数化解调的变转速下柱塞泵故障诊断方法
2021-10-11 02:34徐孜潮群高浩寒陶建峰刘成良孟成文
西安交通大学学报 2021年10期
徐孜,潮群,高浩寒,陶建峰,2,刘成良,2,孟成文
(1.上海交通大学机械与动力工程学院,200240,上海;2.上海交通大学机械系统与振动国家重点实验室,200240,上海)
柱塞泵作为液压系统的动力源和关键元件,具有功率密度大、效率高、变量调节方便等优点,因此在航空航天、机器人、工程机械等领域得到了广泛应用[1]。在航空航天领域,电静液作动器(Electro-Hydrostatic Actuator,EHA)取消了集中式液压能源系统,提高了飞机的安全性、可维护性和工作效率,是多电飞行器的关键部件之一[2]。作为EHA核心元件之一的轴向柱塞泵,需要在10 000 r/min范围内变速工作[3],高转速下柱塞泵容易出现空化现象,引发气蚀,破坏元件,产生强烈振动,造成泵出口流量降低[4],导致效率下降、压力波动、设备故障,甚至造成灾难性后果。因此,在变转速工况下,对柱塞泵空化故障进行及时诊断,可以为液压系统的维护带来极大的方便,节省大量的时间和成本,提高液压系统的可靠性与安全性。
常用的故障诊断方法有3类:基于模型的方法、基于知识的方法和数据驱动的方法[5]。基于模型的方法要求建立较为准确的数学模型,由于柱塞泵结构复杂且内部多物理场耦合,因此很难建立准确的数学模型。基于知识的方法需要大量专家经验知识作为基础,但是泵的动态复杂性使得专家经验知识难以获得。数据驱动的方法由于仅需要历史数据受到越来越多的关注,人工神经网络[6]、支持向量机[7]等方法均在泵空化诊断上有成功应用。近年来,深度学习迅速发展,因其强大的自动特征提取能力获得研究者的青睐。Xiao等将小波包分解的特征输入长短期记忆网络(LSTM)[8],可准确识别柱塞泵的健康水平,相比支持向量机有更高的准确率。Chao等将三通道振动信号转换成RGB图像,输入二维卷积神经网络(CNN)实现柱塞泵空化等级识别[9],具有良好的抗噪性能。
然而,目前多数柱塞泵故障诊断的研究都基于恒定工况的假设,对变转速条件下柱塞泵的故障特征缺乏深入了解,限制了在实际中的应用。变转速工况下信号是非平稳的,其统计特征随时间变化,使得常用的信号处理方法如傅里叶变换、带通滤波等技术都不再适用。基于阶次跟踪的方法是公认有效的变转速下信号处理方法,其核心思想是根据转速曲线在角域内对信号进行重采样,将时变信号转换为角域内的周期平稳信号,使得恒定工况下的信号处理、故障诊断技术可以延用。传统的硬件式阶次跟踪通过硬件直接获取角域信号,成本高且有安装空间要求。计算式阶次跟踪通过插值算法进行重采样,简化了硬件设备,在变转速故障诊断上取得了一定的效果[10],但是存在3个问题:一是仍然依赖转速测量设备,鉴于航空领域对于减小重量、体积的极端要求,额外的硬件安装限制了该方法的应用;二是角域重采样过程中的角加速度恒定假设与插值算法会带来误差,尤其在转速波动大的时候误差无法控制;三是故障信号通常含有多个分量,但阶次跟踪无法分离故障分量[11]。针对第一个问题,研究者提出无转速计式频率估计方法[12],基于时频变换提取瞬时频率曲线。Wang等对轴承振动信号进行短时傅里叶变换,使用峰度搜索从时频图中提取频率曲线[13],再做角域重采样,提取出轴承故障特征。针对第二个问题,Olhede等提出广义解调算法[14],利用频率曲线构造解调因子,解调变换将信号在时频域内转换成平行与时间轴的直线,无需重采样即可实现时变信号的平稳化。Ma等将自适应线调频模态分解算法与广义解调相结合[15],增强了算法在变转速滚动轴承故障诊断中的自适应能力和抗噪声能力。针对第三个问题,传统信号分解方法如经验模态分解存在模态混叠等缺陷,研究者提出迭代广义解调算法。Feng等利用迭代广义解调精确估计其振幅包络和瞬时频率[16],从而构造无交叉项干扰的精细时频分辨率的时频表示,在非平稳条件下行星齿轮箱故障振动信号分析中取得较好的应用成果。变转速下的故障诊断方法,瞬时频率曲线的准确估计仍是其核心,目前基于时频分析的方法非常依赖于时频变换的精度,且时频变换过程中需计算很大的参数矩阵,导致无法处理数据量大的信号[17]。因此,Yang等提出参数化解调方法[18],基于频谱集中性指标和优化算法实现瞬时频率曲线的准确估计,结合迭代解调变换,实现时变多分量信号的分解。
针对变转速工况下柱塞泵故障诊断问题,本文在前人研究的基础上做出改进,提出一种基于参数化解调结合1DCNN-LSTM网络的柱塞泵空化故障程度识别方法,结合了参数化解调的非平稳信号处理能力与深度学习的特征提取能力。该方法利用参数化解调对变转速下泵出口压力信号自适应地提取重点分量并重构,重构信号输入CNN-LSTM网络提取局域特征并学习长期时序信息。本文使用Pumplinx软件建立计算流体动力学(CFD)仿真模型,进行仿真实验来获取变转速下柱塞泵出口压力信号,仿真实验验证了参数化解调提取信号分量的有效性;采集实测信号进行验证,表明该方法在强噪声环境下仍然能以较高的精度对柱塞泵空化程度进行识别,且该方法有效抑制过拟合,具有良好的泛化性能。
1 诊断方法原理
1.1 参数化解调
变转速工况下设备信号一般是非平稳多分量的,其统计特征随时间变化。参数化解调算法是一种处理时变信号的方法,能够分离提取各信号分量。其方法是通过参数估计构建解调因子,将时变信号转换为频率恒定的平稳信号,在使用带通滤波过滤后反解调获得分离出的信号分量,多次迭代,即可获得多个信号分量。
本文用多项式信号模型来描述非平稳信号,多项式相位信号在旋转机械、雷达探测等领域有广泛应用[19],其相位是时间的多项式函数,定义为
(1)
式中:M为信号分量个数,可以事先通过时频分析如STFT来判断;xm(t)为观测到的第m个信号分量;ε(t)为复杂噪声;Am为第m个分量的振幅;P为多项式相位的阶数;am,k(k=0,…,P)为第m个分量的相位系数。
使用参数化解调方法,对非平稳多分量信号进行重点分量提取并重构,算法总共分为4个步骤,流程如图1所示。

图1 基于参数化解调的信号分解重构方法流程Fig.1 Flow chart of signal decomposition and reconstruction method based on parameterized demodulation

(2)



(a)原信号FFT

(b)解调后信号FFT图2 解调变换对频谱的影响Fig.2 Effect of demodulation transform on frequency domain
因此,构建频谱集中度(SCM)来量化解调后分量的集中程度,作为参数估计的指标,其定义为
DSCM=∑(|Zd(f)|q)
(3)
式中:Zd(f)是式(2)中xd(t)的傅里叶变换;q可以是任何正整数,更大的q在一定程度上能够增益目标信号分量、抑制噪声,从而减小优化算法陷入局部最小值的可能性,但是更大的值并不一定会显著改善搜索结果,本文中取q=3。
(4)
在处理含有多个分量的信号时,能量高的分量将优先被提取。
1.1.2 解调变换 利用第1步中估计得的第i个分量的相位系数,按式(2)对信号进行解调变换。目标分量将被变换为一个平稳分量,集中在某一特定频率上,在时频图上,该分量是一条与时间轴平行的直线。而其他分量会分布在较宽的带宽中,噪声则均匀地分散在所有频段。
1.1.3 对解调信号进行带通滤波 将解调信号频谱峰值所在频率作为滤波器的中心频率
(5)
滤波后获得的信号为
e(t)≈Aiexp(j(ai,0+ai,1t))+e(t)
(6)
式中:e(t)为噪声和小部分不需要的分量,其能量相比目标分量很低;由于分量的系数被正确地估计了,Δai.k非常接近0。
1.1.4 恢复过滤后的分量 使用估计的系数来恢复过滤后的分量
(7)

从原信号中去除该分量得到信号残差,按下式计算
(8)
迭代地执行上述4个步骤,直到获得所有目标分量。
1.2 1DCNN-LSTM网络
采用深度学习中较为常用的1D-CNN和LSTM网络来搭建分类器。1D-CNN网络能有效地从连续数据中提取特征,被广泛应用于早期诊断、异常检测等领域[20]。LSTM网络同样是处理时间序列的强大工具,能够学习长期依赖关系。
故障诊断模型结构如图3所示。原始数据经参数化解调处理后输入到1DCNN-LSTM网络中,该网络主要包括卷积层、池化层、LSTM层、全连接层和输出层。
卷积层利用权值共享的卷积核对数据的局部区域进行卷积运算,实现对输入信号的局部特征提取,卷积器的运算公式为
yl+1,k=g(bl,k+Wl,k*Xl)
(9)
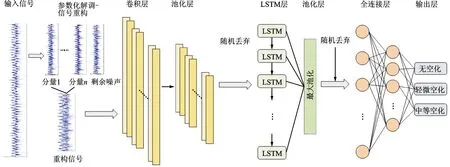
图3 故障诊断模型结构Fig.3 Structure of the fault diagnosis model
式中:yl+1,k为第l+1层第k个卷积核卷积后的输出;g为激活函数,此处采用线性整流函数(ReLU),增强网络的非线性表达能力;Wl,k为第l层第k个卷积核的权重矩阵,bl,k为其偏置项;Xl为第l层的输入;*为卷积运算。
池化层又称下采样层,可以减少数据处理量同时保留充足的有效信息,抑制模型过拟合。本模型采用最大池化方法,将池化区域内的最大值作为池化后对应神经元的值
(10)
式中:pl+1,k(m)为池化后第l+1层第k个特征图第m个神经元的值;yl,k(i)为第l层第k个特征图第i个神经元的值,i∈[(m-1)L,mL],L为池化核尺寸。
LSTM是一种特殊的循环神经网络(RNN),能够学习长期依赖关系,又解决了传统RNN在面对大数据量时的梯度消失或梯度爆炸的问题[21]。图4是单个LSTM单元的结构,主要由遗忘门、输入门、输出门组成,遗忘门决定是否保留前一单元的状态,输入门根据前一时刻状态和此刻输入来更新该单元的状态,输出门控制单元的输出。
LSTM单元的更新如公式(11)所示
(11)

⊗—向量积;⨁—向量加;σ—Sigmoid函数;tanh—双曲正切函数;ft—遗忘门;it—输入门;ot—输出门;xt—单元输入;ht—单元输出;ct—状态向量;候选状态向量t。图4 LSTM单元内部结构Fig.4 Internal structure of LSTM unit
式中:Wf、Wi、Wo分别为遗忘门、输入门、输出门的权重矩阵;bf、bi、bo分别为遗忘门、输入门、输出门的偏置项。
全连接层与输出层位于模型的最后,将学习到的特征映射到样本标签空间,输出分类结果。
为提高诊断模型泛化能力,引入随机丢弃机制,在池化层之后插入dropout层,dropout层随机将一部分神经元激活值置0,减少过拟合现象。
训练模型时,优化器采用Adamt[22]来更新网络参数;损失函数采用稀疏多分类交叉熵,衡量真实标签与模型预测标签的相似性,其计算公式为
(12)

2 故障诊断流程
2.1 数据预处理
(1)使用参数化解调处理信号,按1.1节中的方法,提取泵出口压力信号中能量高的前3个分量并重构成一维压力信号。
(2)采用滑动窗口的形式对信号进行切片,要求切片后一个片段数据中至少包含一个转动周期的信息。单个片段中含数据点1 024个,相邻片段重合点数512个。对每个样本数据进行标准化,公式如下
(13)

(3)将数据集按照80%和20%的比例划分为测试集与训练集。
2.2 1DCNN-LSTM模型建立
按照图3的结构建立深度学习模型,通过一维卷积层提取数据局部特征,再输入LSTM层学习长期时序信息,添加池化层与dropout层抑制过拟合提高泛化能力。表1给出了深度学习模型主要网络层的特征及参数。

表1 深度学习模型主要网络特征及参数Table 1 The main network layer’s characteristics and parameters of the deep learning model
3 仿真验证
为了检验参数化解调能否有效处理多分量时变信号以应用于泵空化诊断,本节建立CFD仿真模型,通过仿真获取变转速工况下柱塞泵发生空化时出口动态压力信号进行验证,也为后续空化模拟实验提供参照。采用Pumplinx仿真软件对柱塞泵进行CFD仿真,仿真流程如下。
(1)使用三维建模软件CREO提取被测泵的流体域模型导入Pumplinx,如图5a所示,通过添加油膜来模拟柱塞泵中配流副、柱塞副、滑靴副的间隙,其中配流副和滑靴副油膜为5 μm,柱塞副油膜为10 μm。

(a)流体域

(b)网格划分图5 CFD模型流体域与网格Fig.5 Fluid domain and generated mesh for the CFD model
(2)对模型进行网格划分,生成的网格模型中包含292 707个网格单元,如图5b所示。
(3)添加空化模型。仿真中采用的空化模型在Singhal[23]提出的全空化模型进行了扩展,添加基于道尔顿-亨利定律的平衡溶解气体模型[24],该模型能够较好地模拟轴向柱塞泵流体特性[25]。
(4)设置仿真参数。表2列出了仿真模型参数,压力为绝对压力,转速在6 000~10 000 r/min的范围内变化。

表2 仿真模型参数Table 2 Parameters for the simulation model
由于柱塞泵的实际工作环境常常比较复杂,工作条件恶劣,泵的信号难以避免被环境噪声所污染。针对此种情况,将高斯白噪声叠加在原始信号上,构造噪声信号,信噪比(SNR,用符号RSN表示)为0 dB。信噪比表征信号的污染程度,信噪比越低,污染越严重,其计算公式为
(14)
式中:Psignal和Pnoise分别为信号功率及噪声功率。
对加噪声信号按1.1节中的流程进行参数化解调处理,提取能量最高的3个分量并重构。图6a~6c展示了原信号、加噪信号与重构信号的时域波形图,可见处理后的重构信号比加噪信号更平滑,与原信号具有更高的相似性。图6d~6f展示了原信号、加噪信号与重构信号的STFT时频图,原信号中能量较高(颜色较浅)的3个非平稳分量均被提取到重构信号中,且加噪信号中遍布所有频带的噪声均在处理后被去除,有效分量十分清晰。

(a)原信号时域波形

(b)加噪信号时域波形

(c)重构信号时域波形

(d)原信号时频图
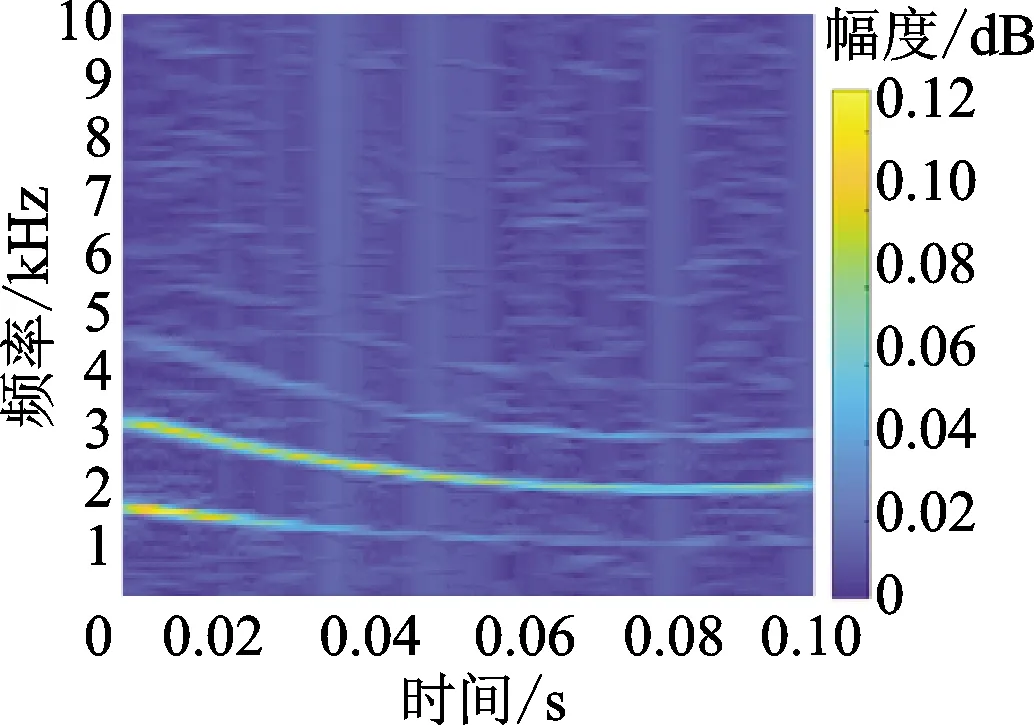
(e)加噪信号时频图

(f)重构信号时频图图6 参数化解调处理前后的压力信号Fig.6 Pressure signals before and after parameterized demodulation
仿真结果表明,在噪声环境下,参数化解调方法能够成功地提取出非平稳信号的分量,对噪声有显著的抑制效果。
4 实验验证
4.1 实验方案与数据采集
为了监测轴向柱塞泵在变转速工况下的空化情况,搭建了柱塞泵故障模拟试验台,系统由主工作回路(图7a)与冷却过滤回路(图7b)组成,通过油箱连接,实物图如图7c所示。主工作回路中,通过离心泵增压,结合压力传感器调节被测柱塞泵进口压力,电机通过联轴器带动被测泵在不同的转速下运行;电磁比例溢流阀调节出口压力,模拟负载。冷却过滤回路中热交换器将油温稳定在40 ℃左右,以减少油温波动对柱塞泵工作状态的影响。

(a)工作回路原理图

(b)冷却过滤回路原理图

(c)试验台实物图图7 柱塞泵故障试验台实物图Fig.7 Test rig for piston pump fault testing
实验台安装了9个主要的传感器:压力传感器PS1-PS3测量泵入口、出口、回油压力,采样率为102 400 Hz;流量计FS1-FS2测量泵出口、回油口流量,采样率为20 Hz;转速计RS1测量被测泵的转速,采样率为102 400 Hz;温度传感器TS1-TS3测量泵入口、出口、回油口的油液温度,采样率为20 Hz。本文主要使用出口压力信号对柱塞泵空化故障进行诊断,由压力传感器PS2采集。
系统运行时,传感器连接到NI数据采集卡,通过以太网传输至计算机上存储并进行进一步分析。使用测控软件Labview定义被测泵入口压力、出口负载、转速来配置不同的工况,并通过PLC执行。实验工况设定泵出口压力为表压5 MPa,入口压力为表压0.1~0.3 MPa。入口压力和油液溶解气体体积分数是影响空化的主要参数[25],实验中维持油液温度稳定,减少其对溶解气体体积分数的影响,通过调节泵入口压力来模拟空化故障的发生;柱塞泵在3 000~10 000 r/min的范围内运行,转速变化如图8所示,变速段为有效数据。

图8 柱塞泵转速曲线Fig.8 Speed curve of piston pump
实验中,由于泵壳体不透明,无法通过观察泵内部气泡来判断空化发生情况。考虑到空化会引起泵出口体积流量下降,且流量下降程度与空化严重程度正相关[26],本文使用容积效率损失Δη来间接表征柱塞泵的空化程度,容积效率损失越大,空化程度越高。容积效率损失的计算公式如下
(15)
式中:qo为泵出口流量;qr为泵回油流量;Q为泵理论吸油流量;n为转速;V为泵的排量。由于流量计采样率较低,要求出口、回油流量qo、qr实现同步采样,非采样点处的Δη通过相邻采样点的Δη来估计范围,若相邻采样点的Δη相差过大,则该段数据舍弃不用。
如表3所示,按容积效率损失分为3个空化等级[26]:无空化0%~1.5%,轻微空化2%~3%,中等空化7%~8%。在实验中,进一步降低入口压力时,泵将发生严重空化,会对被测泵造成不可逆的破坏,在实际应用中,希望能在空化程度较轻的时候就能分辨出来,以便及时采取措施抑制空化发生。

表3 不同工况下的柱塞泵空化等级划分Table 3 Cavitation degrees of piston pump under different working conditions
按第2节的流程处理数据、搭建诊断模型并进行诊断。数据集按照80%训练集、20%测试集的比例随机划分,划分情况如表4所示。

表4 训练集与测试集在不同空化等级下的样本数量Table 4 Sample sizes of training set and testing set under different cavitation degrees
4.2 实验结果分析
4.2.1 参数化解调前处理的影响 一组原始信号经过了参数化解调前处理,另一组信号未经解调重构,分别将两组数据作为输入,用结构、参数完全相同的模型进行训练。图9给出了2种方法在测试集上的分类结果混淆矩阵,每列为各空化等级的预测样本占总样本之比,每行为各空化等级的真实样本占总样本之比,对角的数值越接近1,说明分类准确度越高。从图9看出,采用参数化解调方法能够很好地区分3种不同空化等级,而不采用该方法在无空化和轻微空化的分类上表现不佳,有较明显的误分类。为了进一步评价该方法的分类效果,采用准确率A、精确度P、回收率R及F1值这4个指标,其计算公式分别为
(16)
(17)
(18)
(19)

(a)参数化解调+CNN-LSTM

(b)CNN-LSTM图9 使用两种方法的诊断结果混淆矩阵Fig.9 Confusion matrixes of diagnosis results using two methods
式中:TP、FP、FN、TN是测试集中不同样本的数量,TP是真正例,FP是假正例,FN是假负例,TN是真负例。准确率A是预测正确的样本占总样本的比例;精确度P是衡量实际正例占预测正例的比例;回收率R指实际正例被预测为正的概率;F1是精确度与回收率的调和平均,综合评价诊断模型的性能。
表5对比了是/否使用参数化解调在训练集和测试集上的分类性能评价指标,可见参数化解调方法在测试集上的各项指标都比较高,其分类准确率达到95.4%,比未解调的方法准确率高了6.3%,说明该方法在变转速工况下能有效地提高柱塞泵空化故障等级的识别能力。两种方法在训练集上的准确率很相近,但是未解调的方法在测试集上的准确率下降得更多,说明对变工况下非平稳信号进行重点分量提取并重构,能够有效抑制过拟合,提高模型的泛化能力。

表5 两种方法的诊断性能对比Table 5 A comparison between the diagnostic performances of two methods
4.2.2 在噪声数据集上的影响 在实际应用中,柱塞泵工作环境恶劣,信号不可避免会被噪声污染。为了评估诊断模型在噪声环境下的变转速工况空化等级识别能力,构造一组含噪声的信号,作为模型测试集。构造方法是将不同信噪比的高斯白噪声叠加到原始压力信号上,信噪比范围是0~10 dB。实验方法是,按照上一节的方法对原始压力信号进行参数化解调预处理后训练深度学习模型,然后对含噪声信号同样进行参数化解调预处理后进行测试。图10展示了是否进行参数化解调对噪声环境下分类能力影响的对比。在中等空化程度下,两种方法的诊断能力都很高,参数化解调处理对于噪声环境下的诊断能力没有明显的提高;在无空化与轻微空化条件下,不经参数化解调处理,随着噪声增强,诊断准确率显著下降,在4 dB环境下无空化识别准确率为67.6%,轻微空化识别准确率仅为43.4%,无法满足诊断需求,而参数化解调方法在噪声环境下有较强的鲁棒性,0 dB的强噪声下准确率维持在90%以上,说明该方法能在空化初生时就实现有效识别,便于及时采取措施抑制空化。

(a)无空化

(b)轻微空化

(c)中等空化图10 两种方法在噪声数据集上的诊断性能对比Fig.10 A comparison between the diagnostic performances of two methods on noise dataset
5 结 论
针对变转速工况下轴向柱塞泵故障诊断问题,本文提出一种基于参数化解调和深度学习的诊断方法。柱塞泵出口动态压力信号经过参数化解调处理,提取重点分量并重构,输入到CNN-LSTM网络训练,用于空化故障等级的识别。此外,将不同信噪比的高斯白噪声叠加在原始压力信号上构造噪声信号,经由参数化解调处理后作为测试集对训练好的CNN-LSTM模型进行评估。实验结果表明,本文方法能够自动提取信号的重点分量,准确地对柱塞泵空化严重等级进行判断,准确率达到95.4%,相比未经参数化解调的方法,本文方法能抑制过拟合,提高泛化能力,将分类准确率提高了6.5%。在噪声环境下,本文方法具有较强的鲁棒性,0 dB的强噪声下准确率能维持在90%以上,而不采用参数化解调的方法,其准确率随噪声增强显著下降。
猜你喜欢
流体机械(2022年8期)2022-10-13
大电机技术(2022年4期)2022-08-30
农业工程学报(2022年10期)2022-08-22
农业工程学报(2022年5期)2022-06-22
火箭推进(2022年2期)2022-05-14
山东建筑大学学报(2022年1期)2022-03-02
汽车实用技术(2021年17期)2021-09-23
读者·校园版(2020年19期)2020-09-16
煤气与热力(2020年8期)2020-09-08
当代陕西(2019年19期)2019-11-23