
未知环境的移动机器人路径规划研究
2021-10-20 10:49王海群王水满李硕辉
机械设计与制造 2021年10期
王海群,王水满,张 怡,李硕辉
(华北理工大学电气工程学院,河北 唐山063200)
1 引言
随着科学技术的发展移动机器人越来越被广泛的应用[1]。移动机器人的路径规划也成为了国内外研究的热点话题。根据环境的分类移动机器人分为两类[2],一类为已知环境信息的路径规划,另一类为未完全知道环境信息的路径规划[3]。在未知环境中常用的局部路径规划[4]方法主要有人工势场法、模糊逻辑算法、快速扩展树法[5]等。与其他几种方法相比,模糊逻辑算法较具有计算量较小,对环境依赖性小,实时性好的优点,对于处理未知的环境下的路径规划问题,显示出较大的优越性和较强的适应性。而传统的人工势场法存在极小值[6-7]与目标不可达的问题,但对目标点的跟踪有着极强的效果。对此,这里利用模糊逻辑算法结合人工势场法在未知环境中路径规划。
2 人工场势法分析
人工势场法是由Khatib提出的一种虚拟力法。其核心是:将机器人在环境中的运动视为一种机器人在虚拟的人工受力场的运动。障碍物对机器人产生斥力,目标点对机器人产生引力,引力和斥力的合力作为机器人的作用力,人工势场法的受力分析,如图1所示。传统人工势场法的引力势场函数和斥力势场函数分别为

图1 受力分析Fig.1 Stress Analysis

式中:k-引力增益系数;W-移动机器人位置;Wg-目标点的位置;m-斥力增益系数;ρ0-斥力范围移动机器人与目标点距离;
对式(1)和式(2)求解引力和斥力

相比其他类型的避障算法,人工势场法在未知的环境中实用性强,不需要先验知识[8]。由于人工反势场法的避障特性会使其忽略了大部分的全局信息,其局限性体现在该算法对目标的不可达性和局部极小值问题。
2.1 目标不可达问题
当移动机器人行驶到目标点附近时,如果目标点附近存在多个障碍物,会使移动机器人受多个障碍物与目标点对移动机器人的影响[10],从而无法到达目标点。
目标不可达示意图,如图2所示。当移动机器人距离目标点越来越近时引力也越来越小,而斥力却越开越大从而使移动机器人向反方向移动。而当移动机器人距离目标点越来越远,引力越来越大斥力越来越小,将移动机器人又向目标点移动,从而来回循环无法到达目标点。

图2 目标不可达示意图Fig.2 Schematic Diagram of Unreachable Target
2.2 局部极小值
当移动机器人行驶的过程中,存在多个障碍物,移动机器人会受多个障碍物对移动机器人产生的斥力而同时目标点对移动机器人也会产生引力,当目标点对移动机器人产生的引力与障碍物对移动机器人产生的斥力的合力相等时,会使移动机器人收到的总合力为零[9]。移动机器人会误以为当前的情况势场最小,认为此点就是目标点。局部极小值示意图,如图3所示。移动机器人、障碍物与目标点在一条直线上移动机器人所受的引力与斥力大小,相等方向相反,作用在同一条直线上,合力为零。使移动机器人陷入极小值状态。

图3 局部极小值示意图Fig.3 Map of Local Minimum Value
3 改进算法
为了针对以上问题,提出将模糊算法与改进人工势场发相结合,利用改进人工势场法对目标点进行跟踪,利用模糊智能算法对静态障碍物进行避障,保证算法在未知环境中的实时性。
3.1 改进人工势场法对目标跟踪
当移动机器人利用传感器检测到障碍物的距离大于安全距离L时,利用改进的人工势场法使移动机器人向目标点进行移动,为了对目标点准确的跟踪,这里对传统的人工势场进行改进,将速度与加速的信息引入引力势力场函数中。

式中:k1,k2,k3-常数系数相对速度相对加速度。
通过式(5)可得引力为:

将式(6)整理可得:

式中:ewrg,evrg,earg-分别为相对位移,相对速度,相对加速度方向上的单位向量,根据式(7)可以对目标点的追踪。
3.2 模糊避障算法
当移动机器人利用传感器检测到障碍物的距离小于安全距离L时,移动机器人利用模糊控制器进行避障,这里采取的模糊控制器输入端为移动机器人左方(dl)、正前方(d)与右方(dr)距障碍物的距离和移动机器人与目标点之间的角度r。模糊控制器的输出端为移动机器人与目标点角度的变化量rc。将输入距离模糊化变量定为{}N,F,论域为(0~1)m,移动机器人与目标点之间的角度r的变量定为{ }LB,LS,Z,RS,RB,论域为(-180~180)°,将移动机器人与目标点之间的角度的变化量rc的变量定为论域为(-60~60)°。各个变量的隶属函数为三角形,解模糊用重心法。部分规则库,如表1所示。

表1 部分规则库Tab.1 Part of The Rule Library
4 仿真实验
为了验证改进人工势场法+模糊算法的有效性,这里采用MATLAB2016a对这里算法进行仿真实验设置移动移动机器人的最大移动距离为0.12m,安全距离L为0.6m。流程图,如图4所示。
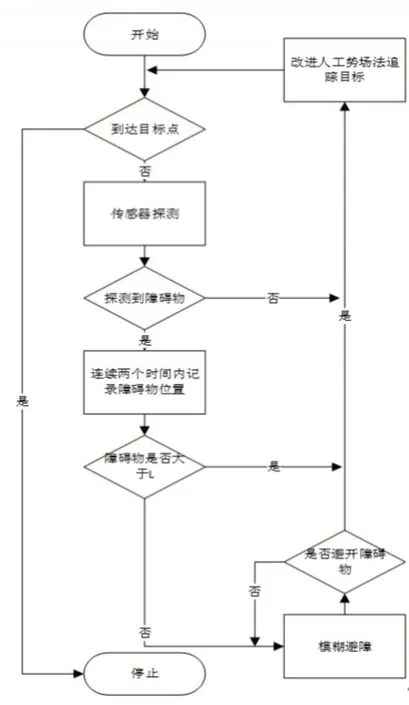
图4 算法流程图Fig.4 Algorithm Flow Chart
为了测试该方法,与传统的人工势场法进行对比实验,算法对比结果,如图5所示。该方法根据障碍物检测结果对移动移动机器人移动方向和速度进行不断调整,移动移动机器人可以较好无碰撞的避开障碍物,并准确到达目标点。
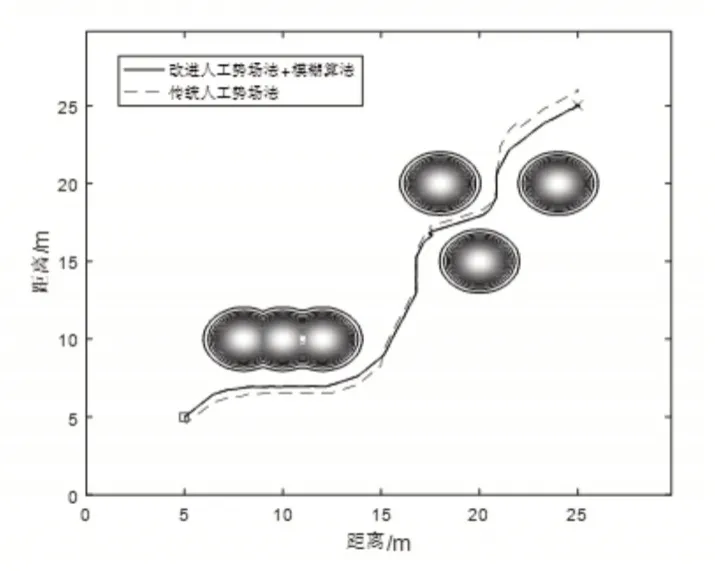
图5 算法对比结果Fig.5 Comparative Results of The Algorithm
仿真对比,如表2所示改进人工势场法+模糊算法行进的距离更短,时间更短,说明该方法寻得的路线更优。为了验证避障精度进行20次避障实验,传统人工势场法成功避障15次,该方法成功避障19次,精度可达96%。与人工势场法相比,该方法结果更为精确性能更优。移动移动机器人避障时航向角误差,如图6所示,在图6可以看出该方法误差波动明显要比人工势场法小。更能体现该方法的优势。
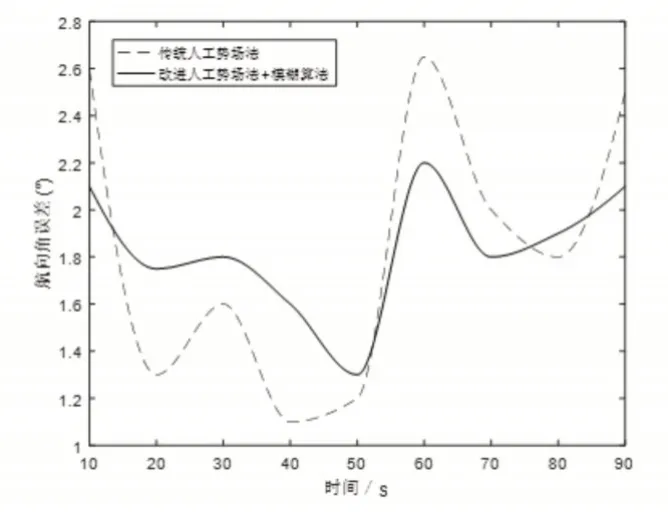
图6 航向角误差Fig.6 Course Angle Errors
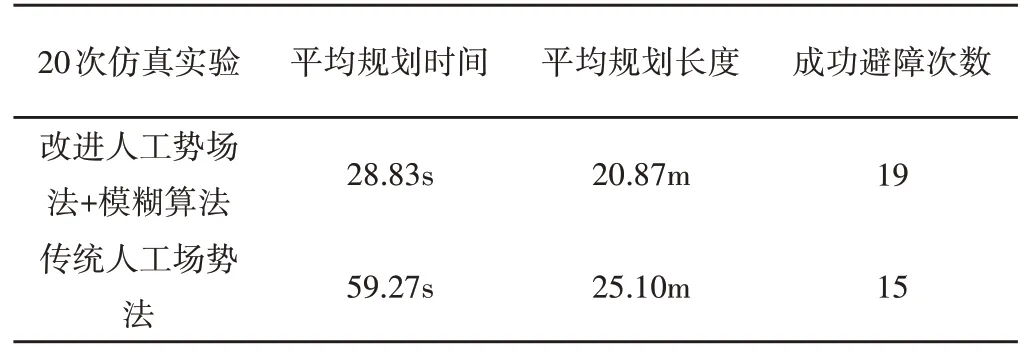
表2 仿真对比Tab.2 Simulation Comparison
5 结论
针对移动移动机器人在未知环境中避障问题,首先分析了传统的人工势场法优缺点,针对这些问题提出了利用模糊智能算法加改进的人工势场法对未知环境避障。仿真结果表明,该方法能够能够安全并高效的到达目标点,避免了传统人工势场法避障时目标不可达与局部极小值的问题。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
中学数学研究(江西)(2020年5期)2020-07-03
中学数学研究(江西)(2019年11期)2019-12-31
成都信息工程大学学报(2019年3期)2019-09-25
科技风(2018年19期)2018-05-14
石油地球物理勘探(2017年4期)2017-12-18
制造技术与机床(2017年3期)2017-06-23
自动化学报(2017年1期)2017-03-11
系统工程与电子技术(2016年4期)2016-08-24
