
“雪龙2”号极地考察船月池系统的设计与应用
2021-10-27 08:32陈清满王硕仁赵炎平袁东方夏寅月沈悦廖周鑫
中国舰船研究 2021年5期
陈清满,王硕仁,赵炎平,袁东方,夏寅月,沈悦,廖周鑫
中国极地研究中心,上海 200136
0 引 言
月池主要应用于海洋工程领域,是一种从水面一直连通到水体内并贯穿浮体结构的结构物统称。传统的月池主要包括两个方面的应用:一是在恶劣海洋环境中营造出比浮体周围环境更稳定的小环境,用于保护入水的设备,例如某些深海浮式生产平台(张力腿平台、半潜式钻井平台和浮式生产储运系统等)和新建的极地科学考察破冰船(以下称极地考察船)上设计的月池结构;二是采集海洋波能,例如通过特殊设计在特定条件下加剧月池内海水整体沿垂直方向上下振荡(类似发动机缸内活塞运动的“活塞”现象[1-2])和沿水平方向左右振荡的“晃荡”现象,从而提高波能转换效率。这些波能采集系统包括了振荡浮子式、振荡水柱式、鸭式和摆式等形式[3]。
上述应用是利用月池系统特点的两个极端例子,即一方追求的效果是另一方极力避免的。当月池内出现“活塞”和“晃荡”现象时,水体对月池内设备的作用力急剧增大,导致非工作状态下设备的位移,甚至结构破坏,影响设备的正常运行。但是,对于波能转换装置而言,月池内自由液面的升降及波面上下剧烈运动的情况下,“活塞”现象越剧烈,越有利于提高波能转换效率。
随着对南极探索和资源开发利用的不断深入,面对极地的恶劣环境,在极地考察船上也相继运用了一些新技术。例如,作为综合性考察船,其所搭载的实验室及科考调查设备均需满足多学科的调查采样、实验分析需求[4],因此通常会配备有温盐深仪(CTD)、浮游生物垂直拖网、遥控无人潜水器(ROV)和自主水下航行器(AUV)等,这些设备也大都需要绞车、A 型架等甲板支持系统从船上布放,调查取样完成后再回收至船上。开展一般的大洋调查时,这些设备可以从舷侧或船艉顺利布放和回收,但是,在极地大洋这种恶劣环境下开展科考作业经常会受到浮冰及固定冰的影响,使得从舷侧或船艉布放和回收设备变得不可能,即使是布放初期洋面无浮冰,在长达3~4 h 的作业期间随风流漂过来的浮冰也会对缆绳及待回收设备构成较大的威胁。例如,2014 年3 月,我国开展第30 次南极科学考察时“雪龙”号船在普里兹湾科考作业遭遇了严重冰情,大部分断面站点受到浮冰影响而无法正常作业,部分科考计划因此而“搁浅”[5]。这种案例还有很多,限于篇幅,不再赘述。
综上,在极地考察船上设计安装月池系统可以在船底区域营造出免受浮冰影响的小环境,有利于科考调查设备的正常投放和回收,解决极地考察船在极地冰区无法开展科考作业的难题,使其能够在秋、冬两季和更高纬度的极地密集浮冰区开展作业,极大地提升作业效率和能力。鉴此,在极地考察船上设计月池系统开始受到重视。
截至2018 年的统计,全球现役极地考察船约有91 艘,实际配备了月池的船舶数量远小于海洋工程平台,而供极地考察船使用的月池设计技术仍处于探索和试验阶段。不仅如此,月池的设计和使用还面临一些有待克服的难题。例如,国外一艘极地考察船(北极破冰调查船)月池内出现了较严重的碎冰堆积的现象,在进入冰区后短时间内月池底部就冻结了厚厚的冰坨,使月池无法正常发挥功能。可见,在极地考察船上应用月池系统也需要不断积累经验。目前,我国仅服役了“雪龙”号和“雪龙2”号两艘极地考察船。在“雪龙2”号船2019 年开始运营前,我国极地考察船仅能够从舷侧布放和回收科考调查设备,而且经常受到极地恶劣冰情的影响,无法在密集度较高的冰区开展科考作业和获取相应数据和样品,导致科考计划需要被动地根据现场冰情调整。随着“雪龙2”号船的服役,其设计安装的月池系统解决了在密集冰区调查采样的难题,也填补了我国极地考察船设计建造和应用月池系统的空白,为后续同类型系统的设计建造积累了经验。
本文将根据“雪龙2”号船月池系统的设计建造情况,介绍月池系统的设计原理、实现方式和极区应用等,并重点对月池水密底盖设计、月池井道消波设计、科考调查设备布放和回收、极区低温环境设计等方面进行分析。
1 极地考察船的月池尺寸
各国扩大在南极大陆和海域的实质性存在是争夺未来各项重大权益的唯一选择。美国、俄罗斯、英国、澳大利亚、新西兰等国都公开声称将以在《南极条约》体系中的领导地位作为战略目标,通过建造和装备新一代极地考察船,加强在南极大陆架的勘测、海洋资源调查和环境调查研究能力,以强化和保持其领导地位。2008 年和2009 年,日本和韩国分别建造完成了“白濑”号和Araon 号极地考察船,中国也于2019 年首次自主建造完成了“雪龙2”号极地考察船。表1 所示为各国将月池系统作为重要装备的新建极地考察船。
由表1 可见,各国新建的极地考察船中月池的主要用途均为布放和回收CTD 等科考调查设备,但月池的结构、开口尺寸和技术细节等差别较大。月池的开口尺寸由主要投放和回收设备的尺寸和船舶破冰等级所决定。鉴于月池系统的复杂性及其对船体的重要影响,月池的开口尺寸通常以满足布放和回收设备的尺寸需求作为临界值。根据多数极地考察船的经验,月池系统从论证、设计到最终建造完成,尺寸存在减小的趋势。破冰等级越高的船舶,在更为严峻的冰情下科学调查功能的实现对月池的依赖程度越大,其尺寸也相对较大,而破冰等级越低的极地考察船对月池的依赖程度反而越小。我国“雪龙2”号船的破冰等级居中,根据极区大洋科考调查的实际需求,月池系统必须满足CTD(24 瓶位10 L,采水器直径1.55 m)和生物垂直拖网(组合网具尺寸小于CTD 直径)作业的要求,结合船体总体设计方案,最终选取月池尺寸为3.2 m ×3.2 m。

表1 国内外含月池设计的新建极地考察船Table 1 Summary of new polar research vessels with moonpool design across the world
2 “雪龙2”号船月池系统的概述
2.1 月池配备需求
“雪龙2”号船隶属于自然资源部中国极地研究中心,作为我国深化设计并自主建造的首艘极地考察船,其破冰能力为PC3 级,可在混有陈冰的次年海冰的两极水域航行作业,能连续以2~3 kn的速度在厚度不低于1.5 m 的平整冰(外加0.2 m雪)中艏、艉向破冰航行,其中艏向航行具有冲撞破冰能力,艉向航行可确保在20 m 厚的当年冰冰脊(含4 m 堆积层,外加0.2 m 雪)下不被卡住。相比“雪龙”号船只有艏向破冰能力(艏向航行能以1.5~2 kn 的速度连续破1.2 m 厚的冰(含0.2 m的雪)[6]),“雪龙2”号船的破冰能力得到了提升,可延长船舶冰区作业的时间窗口,一定程度上拓展了作业空间范围,且通过在“雪龙2”号船上配备月池系统,克服了原先在密集冰区内仅能从舷侧布放和回收设备的限制,获得了与“雪龙2”号船拓展破冰能力相适应的冰区科考作业能力。
在“雪龙2”号船项目建议书、可行性研究报告阶段,为明确该船设想的科学任务需具备的船舶性能特征,以及使船舶设计建造与科学需求、科学任务相匹配,自然资源部极地考察办公室和中国极地研究中心曾针对我国极地考察船需要关注的主要科学问题广泛征求了相关领域科学家的建议。通过梳理科学家提出的11 个科学问题,发现其中有9 个与海冰、冰间湖有关,因此,需要“雪龙2”号船具备较强的冰区调查采样能力。对于相应的功能需求而言,也就需要“雪龙2”号船配备月池系统以适应冰区科考调查的科学需求。图1 所示为月池系统从主甲板向下垂直贯穿到船底(共5 层)的示意图。

图1 “雪龙2”号月池系统贯穿甲板示意图Fig. 1 Illustration of moonpool system penetrating through decks in Xuelong 2
2.2 结构组成
“雪龙2”号极地考察船的月池系统由舱盖系统、滑车系统、动力操控系统等3 个二级系统以及三级部件和四级模块组成,如表2 所示。
图2 所示为“雪龙2”号月池系统的主要结构图。舱盖系统主要位于月池井道的两端,其中,顶盖位于主甲板,底盖位于船底;滑车系统的导轨分为固定导轨和活动导轨两个部分,贯穿整个月池井道,升降滑车在导轨上往返移动;动力操控系统液压泵站布置在主甲板上,为各活动部件提供液压动力。本地操控台位于液压泵站旁,而远程操控面板则位于操控室操控台。

图2 “雪龙2”号月池系统主要结构图Fig. 2 Main structure diagram of moonpool system in Xuelong 2

表2 “雪龙2”号船月池系统的主要结构组成Table 2 Main structure composition of moonpool system in Xuelong 2
2.3 功能实现
目前,国际上所有含月池系统的船舶,其底盖都未采用水密设计,航行过程中月池内水体与船外水体是连通的,月池井道内液面与海面相同,因此含这类月池的船舶在航行中会伴随有月池内水体的复杂运动,在此过程中耗散船舶的运动能量,并且月池内水体的周期性漩涡运动还将导致船舶阻力与航行姿态发生同周期的变化[7]。
为提升船舶航行效率和稳定性,同时,避免极地冰区低温对月池功能的影响,“雪龙2”号船的月池底盖采用了水密设计,以将月池井道与船体外水体隔离,在非作业期间,关闭底盖,抽空井道内的水体。顶盖采用风雨密设计。滑车系统可以避免布放和回收设备时船舶摇摆导致仪器设备磕碰月池结构,确保了仪器设备沿预设轨道安全收放。导轨主要用于滑车的升降,与月池顶盖干涉的部位采用活动导轨,待顶盖开启后与固定导轨对接,组成连续导轨,可确保滑车移动不受限制。其他部位采用固定导轨。动力操控系统采用液压动力,月池盖开启与关闭、月池盖插销锁紧与解锁、活动导轨上下移动对接等动作都由液压油缸执行,并采用可编程控制器控制系统对各动作进行控制。
2.4 月池操作流程
本文以CTD 设备的布放和回收为例,介绍月池操作的流程。
在开始CTD 投放作业前,首先将海水注入月池井道内,直至与海面齐平,平衡月池底盖上下的水压,以便开启月池底盖。然后,将CTD 移动至月池顶盖上方,且正对滑车下方,以便两者对接。其后,按如下步骤操作:CTD 铠装钢缆穿过相应滑轮及防坠闩锁头,并与CTD 连接;打开滑车锁架,滑车下移至CTD 导接头上,将防坠闩锁紧,CTD 与滑车建立刚性连接;CTD 绞车与月池系统的钢丝绳直拉绞车建立联动(钢丝绳直拉绞车用于滑车升降),为保护CTD 铠装钢缆,CTD绞车随动;解锁月池顶盖插销后,开启月池顶盖;解锁月池底盖插销后,开启月池底盖;滑车与CTD 下移至活动导轨下端;活动导轨下移并与月池井道内固定导轨对接;滑车与CTD 通过固定轨道继续下移至月池井道底部;解锁防坠闩锁头,解除CTD 绞车与月池钢丝绳直拉绞车之间的联动;正常操作CTD 绞车作业。
回收过程与上述投放过程基本相反。具体步骤如下:
操作CTD 绞车至CTD 导接头与月池底部的滑车对接,并锁紧防坠闩;CTD 绞车与月池钢丝绳直拉绞车建立联动;提升滑车与CTD 至活动导轨顶端;提升活动导轨至限定位置;继续提升滑车与CTD 至滑车锁架上方;关闭滑车锁架,使滑车与CTD 置于滑车锁架上;关闭月池底盖并锁紧插销;关闭月池顶盖并锁紧插销;防坠闩解锁,解除CTD 绞车与月池钢丝绳直拉绞车之间的联动;将CTD 置于月池顶盖上,进行后续的CTD 取水等作业。
若接下来短期内没有月池作业计划,待月池底盖关闭插销锁紧后,即可进行月池内海水排水、淡水清洁的操作,最后用蒸汽压缩空气吹除残余水分,以防止结冰。
3 “雪龙2”号船月池系统设计要点
3.1 位置确定
“雪龙2”号船的月池位于舷侧作业位置对应的船舯部位,主要基于如下考虑:1)传统上通过舷侧作业的方式在大洋及零星浮冰区域仍然具有反应速度快、表层水交换性好等优势,需要保留此作业方式。因此,布放和回收相关科考调查设备(如CTD 等)一般在舷侧和月池间切换。月池设置在与舷侧作业对应位置,切换更为便捷;2)船体连续结构上设置一个井道尺寸为4.8 m×4.8 m(净开口为3.2 m×3.2 m)的开孔,约占“雪龙2”号22%的船宽,对船体结构强度要求较高,位于船舯有利于船体结构强度延续;3)“雪龙2”号船在冰区破冰航行时部分碎冰在船体的挤压作用下将浸没于水下,随水流划过船底壳,与船底产生摩擦与碰撞[8]。船艏底部安装下沉式纺锤型箱式龙骨,可将海冰导流向船底两侧,船底中间区域流冰较少,月池布置在中间位置设备更安全。
3.2 井道顶盖和底盖密性要求
1) 月池井道顶盖。
“雪龙2”号月池系统井道顶盖为风雨密。由于主甲板兼有科考调查物资临时存储的功能,为保证月池井道顶盖关闭后月池科考作业区内人员、物资通行安全和便利,顶盖采用埋入式安装方式,关闭后与主甲板地面齐平。同时,顶盖设计强度不低于主甲板其他部位,满足了该舱室内整个甲板货物堆放存储的需求。顶盖风雨密设计可确保月池车间内冲洗甲板、设备时,月池井道内保持干燥,这对于在极地冰区发挥月池的功能具有重要的意义。
2) 月池井道底盖。
通常船舶或平台的月池系统较少配备月池井道底盖。但是,开敞的月池井道将增加船舶航行时的动力消耗,基于经济性和节能的考虑,部分船舶会配备非水密底盖。然而,极区环境具有较强的特殊性:一方面,若采用月池井道敞口的设计,破冰船破冰时产生的碎冰将会沿船底向后运动[8],到达月池井道底部开口处后,在没有外力阻挡下将在月池井道内上升并积累,而且井道内浮在自由液面的冰还会严重影响科考调查设备的投放和回收作业。另一方面,若采用非水密月池底盖设计,井道内海水将长期存在。极地冰区水温较低(常临近−2 ℃),海水易在月池内结冰,影响月池功能的发挥。同时,全船将多出约190 t 存在自由液面的“压舱水”,对船舶的浮性、稳性均会产生影响。加拿大一艘北极破冰调查船由于其月池底部封盖采用了非水密移门设计,在冰区使用中出现了较为严重的碎冰在月池中积累的现象,该船进入冰区后短时间内底部就冻结上了厚冰坨,使得月池功能无法正常发挥。
为避免海水在月池内结冰或海冰堆积,“雪龙2”号船的月池底盖采用了水压密形式,如图3 所示。底盖水压密的保持与船舶的吃水有关。“雪龙2”号船的设计吃水为7.85 m,满载吃水为8.3 m,对底盖的密性提出了较高要求。同时,月池净开口越小,单扇月池底盖尺寸也会减小,而承受的总压力越小,系统水密可靠性就越强。因此,“雪龙2”号船的月池开口设定为满足基本使用需求的较小尺寸。

图3 月池系统水密底盖图Fig. 3 Moonpool system watertight bottom cover
“雪龙2”号船破冰航行时,大量体积较大的碎冰将划过或撞击关闭锁紧后的月池底盖,底盖将承受约8 m 的水压作用,在航行海域底盖还会受到涌浪升沉冲击和砰击载荷作用,因此,设计底盖受压时考虑了一定的冗余。最后,底盖关闭锁紧后按能够承受12 m 的水压(即0.12 MPa)的要求进行了设计,底盖口外表面积为9.9 m2,底盖上总负载为1 188 kN。此外,针对底盖关闭过程,还需考虑底部水流和冰流对关闭装置的顶升力和拍击作用,且强烈的上涌冲击力会导致底盖结构受损和折断液压油缸。因此,在充分考虑上述因素的基础上,“雪龙2”号船的月池底盖的设计采用了沿单侧铰链转动的方案,通过4 个大型液压油缸进行启闭。除启闭液压油缸外,闭合后的底盖还可以通过12 个(除安装铰链一侧外的3 个侧面,每侧4 个)液压插销锁止。
“雪龙2”号船月池系统使用的铰链、液压油缸的材质其结构强度远超内、外部载荷要求,可满足极地冰区的使用需求。其中,闭合铰链采用了AISI 630 H1150(H620)材质,屈服强度不低于725 MPa。经计算,闭合后的月池底盖Von Mises 应力绝大部分区域低于20 MPa,仅在12 个插销位置附近超过90 MPa(图4),月池底盖中央区域的变形超过1 mm(图5)。为了确保破冰及冰区航行时的结构安全,“雪龙2”号船月池底盖采用与船体一致的AH36 钢材(屈服强度不低于355 MPa),结构强度设计不低于船体外板。

图4 月池底盖Mises 等效应力图Fig. 4 External loading-Von Mises stress of bottom cover of moonpool

图5 月池底盖受力形变图Fig. 5 External loading-displacements of bottom cover of moonpool
3.3 低温环境除冰
极地气候环境条件恶劣,冬季时间长、气温较低、海表长年被冰覆盖。北极气温大都介于−43~−26 ℃之间,平均气温为−34 ℃;南极的气候通常较同纬度的北极更冷,且南极海气交换强烈,湿度大,相对湿度大都不低于95%,这种极端气候极易在破冰船上形成覆冰[9-11]。同时,低温将严重影响材料性能,加速橡胶密封圈的老化和钢铁断裂韧性衰退。当冰在船舶或设备(例如液压油缸、插销)局部积累时,过大的重力会产生复杂的内应力,易造成结构部件损坏[12]。月池井道底盖是否正常关闭、关闭是否到位、插销是否锁紧均由限位传感器发出信号,若此类部件表面覆冰,可能得到错误或者相反的信号,严重影响操作人员的判断,从而引发事故。
由于“雪龙2”号船的月池系统底盖采用了水密设计,在正常情况下顶盖、底盖呈关闭状态,月池井道内无水,而到达月池作业站点前,月池井道内会注水,待与水线齐平且内、外压力平衡后底盖才会开启。在作业结束后,关闭底盖并将月池井道内海水用泵抽到舷外,井道内经淡水冲洗后排出冲洗水,然后使用压缩空气和高压蒸汽烘干吹除月池井道内残留的小部分水体,以确保无残留水渍。经过上述处理,液压油缸、底盖与船体接触缝隙等活动关节处将不会冻结而影响后续使用。此外,“雪龙2”号船的月池系统水线以下主要活动部件处都预设有辅助电加热装置,若活动关节因存在少量水体冻结而影响使用时,提前开启辅助电加热装置即可去除冻冰并恢复功能。
3.4 双壳结构消波
“雪龙2”号船的月池井道深度为11.8 m,在绝对静止状态下,月池内的海水自由液面至月池顶盖开口处的高度约有3.5~3.95 m。在气旋的影响下,南极海域冰区涌浪通常可达3~4 m。如前文所述,在月池开口尺寸一定且涌浪升沉满足一定的频率的情况下,月池内的水体会发生剧烈振荡,幅度远比船体外围的涌浪剧烈,其引发的“活塞”现象还会导致海水涌上主甲板。不仅如此,“活塞”和“晃荡”现象还会对布放和回收的设备、月池结构本体造成冲击,危害设备安全;同时,月池内水体的剧烈振荡还会在月池所在的作业车间产生较大啸叫声,恶化现场作业环境。
如图6 所示,“雪龙2”号船的月池井道内四壁采用双壳结构进行消波处理,以减小海水振荡冲击载荷。月池井道的四壁双壳结构间距为单边0.8 m。双壳结构外壳为密封钢板,内壳为镂空钢板,两层壳体内敷设海水管、淡水管、控制线管、液压管线等。
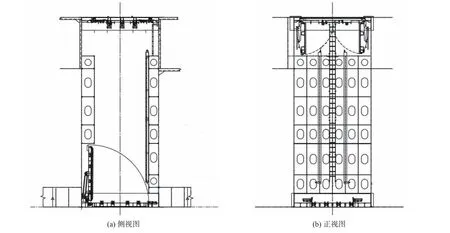
图6 “雪龙2”号月池系统双壳结构Fig. 6 Double-shell wave-reducing structure of Xuelong 2 moonpool system
3.5 滑车系统
为避免因船体摇晃而磕碰设备,“雪龙2”号月池系统在船艏一侧设置了滑车导轨,携带设备的滑车可沿轨道安全布放回收。由于月池顶盖为风雨密设计,轨道与月池顶盖邻近和接触的部位无法形成连续结构,故通常的设计均会采用活动导轨和固定导轨相结合的形式。
南非S. A. Agulhas Ⅱ号极地考察船的月池顶盖为双扇上开式,顶盖铰链与固定导轨位置平行,活动导轨设在靠近固定导轨一侧的月池顶盖背面。其他固定导轨分为2 个部分:一部分位于月池井道内;另一部分位于开启后的月池顶盖上空。当月池顶盖向上开启到位后,位于月池顶盖背面的活动导轨露出,并与另两部分固定导轨对接形成连续的导轨结构。
“雪龙2”号船月池顶盖则采用一种完全不同的双扇下开式设计,且其铰链与固定导轨位置垂直,导轨也分为2 个部分:一是井道内的固定导轨;二是井道上空的活动导轨。受限于主甲板所在层的净空,滑车在活动导轨上的行程分为两步:第1 步活动导轨不动,滑车下移至活动导轨底部;第2 步滑车不动,活动导轨下移并与固定导轨对接形成连续导轨结构后,滑车继续下移。如所在层高足够大,可设计更长的活动导轨且更简便,即只要活动导轨下移并与固定导轨对接形成连续导轨结构后滑车就可继续下移。
3.6 设备与滑车对接及主动、从动控制
“雪龙2”号船在利用月池系统进行科考作业时,调查设备顶端的导接装置与滑车系统的锁扣装置连接,通过液压控制油缸对连接进行锁紧或解锁(图7)。

图7 月池系统防坠闩锁头结构截面图Fig. 7 Structure details of section of moonpool at latching head
在使用月池系统进行科考调查时(以CTD 作业为例),CTD 设备与月池收放绞车装置连接在一起并处于锁紧状态,其作为一个整体在月池滑轨上移动,可保证CTD 设备在月池中的平稳布放和回收。由于月池上的滑车自重约1.5 t,加上CTD 设备的24 瓶海水样品采集后(重约0.44 t)的总重较大,若滑车运行中所有重量都由CTD 设备的铠装缆承受,将影响CTD 的钢缆使用寿命和数据通信,甚至出现铠装缆断裂的严重事故。因此,在设计时,采用了月池收放系统绞车为主动力、CTD 绞车被动跟随的控制方式,即在作业时月池绞车作为提升和下放的主动力,由绞车钢缆承受主要受力,CTD 绞车通过恒张力控制模式跟随绞车移动,其铠装缆只承受系统设定的张力。上述设计可有效保护布放和回收作业过程中CTD的铠装缆,保证CTD 的作业安全。
4 极地现场使用情况
2019 年12 月9 日~10 日,中国第36 次南极考察队在南大洋宇航员海进行科考作业,调查作业站位(66°40′S,55°11′E)海域附近的海冰密集度约80%~95%(图8),传统的舷侧CTD 布放和回收作业无法开展,而“雪龙2”号船在该海域3 次成功通过月池系统完成了作业测试(图9)[13]。“雪龙2”号船的月池系统配备可以保证即使在10 成冰(海冰覆盖率达100%)海域也可顺利实现针对既定计划站点的调查作业。

图8 2019 年12 月9 日南大洋海域冰情图Fig. 8 Ice chart of the Southern Ocean in Dec 9, 2019

图9 “雪龙2”号成功在南极冰区进行月池测试Fig. 9 Xuelong 2 successfully conducted moonpool test in Antarctic
在此次南极现场使用测试过程中,经多次磨合测试,为冰区月池系统的应用及改进提高积累了一些经验。月池井道内注入海水后,底盖解锁插销,插销完全解锁后,再执行开盖动作。每个动作的极限位置均有限位传感器给出信号。同时,相应的插销解锁和锁紧、底盖启闭是否到位、滑车进入水体后状态、设备与滑车是否分离等状态,都可实时传输给本地控制站、指挥中心远程控制台和船舶驾驶台。指挥中心和驾驶台可随时掌握月池系统的运行状态,为更准确地操船配合科考作业提供决策依据,从而进一步提高设备的使用安全性。
5 结 语
“雪龙2”号是我国第1 艘配备了月池系统的极地考察船,在借鉴国外极地考察船月池使用经验的基础上,结合自身多年极地现场调查的理解,合理设置了舷侧和月池作业切换动线,创新使用了风雨密顶盖、水压密底盖、特殊的轨道对接方案、烘干多余水分及活动关节加热除冰的双保险设计等,成功研制出了适合我国极地考察船的新方案。“雪龙2”号船在南极密集浮冰区成功应用月池系统,宣告了我国极地科考调查以往受限于海冰密度而不断调整作业站点计划的窘境一去不复返,标志着“雪龙2”号船形成了与其破冰能力相匹配的极地冰区科考作业能力,是我国在极地科考调查装备领域获得的技术飞跃。对于科考作业而言,月池系统将“雪龙2”号船破冰能力的增强所带来的考察空间及时间拓展发挥到了极致,为后续我国在极地密集浮冰区的科考作业奠定了坚实的基础,对极地考察船月池系统的设计和建造具有一定的借鉴意义。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
廉政瞭望(2021年22期)2021-12-29
中学生理科应试(2021年10期)2021-12-07
廉政瞭望(2021年11期)2021-03-25
智慧少年·故事叮当(2020年6期)2020-06-21
百科知识(2020年3期)2020-02-24
北广人物(2019年46期)2019-12-30
轻兵器(2019年8期)2019-08-30
中国体育科技(2019年7期)2019-08-19
航空模型(2017年3期)2017-07-28
