
检影模拟练习眼操作及跨骑法散光轴位验证
2021-12-05 13:08隋建英
中国眼镜科技杂志 2021年11期
文 隋建英
在检影过程中,当视网膜反射光带被消解至中和时,用跨骑法可验证散光轴位是否正确。操作方法是在已中和好的散光轴位两侧各45度轴位摇动检影镜进行观察。如果两侧各45度轴位影动,均已中和,证明初判散光轴位正确,如果两侧各45度轴位影动,一侧为顺动而另一侧为逆动,则说明初判散光轴位有误,需进行轴位调整,可将已中和好的散光轴位两侧各45度轴位之任意一轴命名为跨骑1或跨骑2。
1 已中和好的散光轴位两侧各45度跨骑轴位
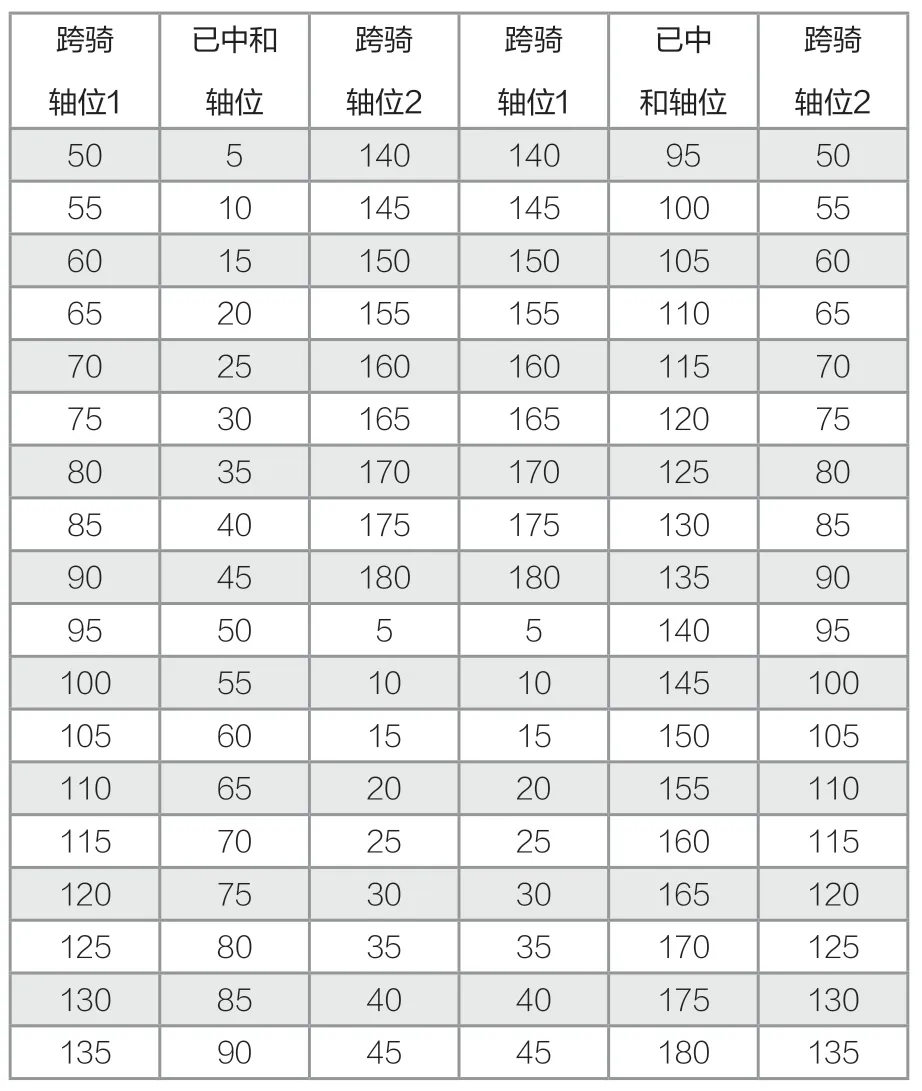
表1
2 跨骑法散光轴位验证操作要领
a.将所测初始球柱镜度数插入与被检者瞳距相符的试镜架;
b.将带状检影镜光束投入瞳孔区,光束与所测轴位重合;
c.分别在跨骑1和跨骑2两轴向摇动检影镜,摇动方向与所测轴位相垂直,观察影动中和情况;
d.若所测轴位两侧的跨骑1和跨骑2影动均已呈中和状态,证明检影初判散光轴位正确;
e.若所测轴位两侧的跨骑1和跨骑2显示一侧为顺动,而另一侧为逆动,说明初判散光轴位有误,需将散光轴位进行调整;
f.轴位调整方法:远散的初判轴位向发生顺动的跨骑轴位方向调整,近散的初判轴位向发生逆动的跨骑轴位方向调整。若一次调整后,两侧跨骑轴位仍然有顺有逆,则再次用跨骑法验证调整,每次轴位调整5度,直至左右两侧跨骑轴位的影动均为中和状态,即可判断此轴位正确。可简要描述为“近散追逆,远散追顺”。
g.轴位验证完毕,在球镜度数上加人工近视度数即为初始检测结果。人工近视度数因检查者和被检查者之间距离而产生。人工近视度数为:1m(-1.00DS);0.67m(-1.50DS);0.5m(-2.00DS)。
3 检影模拟练习眼结构
3.1 初学者要先用模拟练习眼进行练习
模拟练习眼镜筒红色数字为负球镜度,黑色数字为正球镜度,每小格0.50DS。镜筒设置范围:负球镜度最高可设置-5.00DS,正球镜度最高可设置+4.00DS,设置的是实际度数。如果操作范围大于模拟练习眼设置度数,可在练习眼前槽插入相应度数的试镜片,人为设置度数。
模拟练习眼前槽人为设置度数和镜筒拉伸度数联合为总设置度数,形成一个模拟人眼的屈光系统。
在检影操作时,前槽人为设置度数之镜片不可与影动消解镜片混淆,需另行用相应的试镜片消解影动。
以下是模拟练习眼结构图:

图1 模拟练习眼正面图

图2 模拟练习眼前槽(含3个可插试镜片槽)

图3 模拟练习眼镜筒度数拉伸图
3.2 模拟练习眼设置方法(以下操作均以工作距离0.67m,人工近视-1.50DS为例)
a.前槽预置度数+镜筒拉伸度数=实际设置度数;
b.影动消解度数+人工近视度数=实际设置度数;
c.前槽预置度数读取方式为符号相反,轴位和度数不变;
d.前槽加负球镜等于人为远视,与镜筒拉伸远视度数联合为总远视度数;
e.前槽加正球镜等于人为近视,与镜筒拉伸近视度数联合为总近视度数;
f.前槽加负柱镜等于人为远散,与镜筒拉伸远视度数联合为复性远视散光,轴位不变;
g.前槽加正柱镜等于人为近散,与镜筒拉伸近视度数联合为复性近视散光,轴位不变。
4 影动消解方法及快速判断
a.检影所见逆动,为-1.50D以上近视,用负号片消解;
b.检影所见顺动,为远视或小于-1.50D近视,用正号片消解;
c.负球镜消解度数比实际设置度数低-1.50DS;
d.正球镜消解度数比实际设置度数高+1.50DS。
4.1 复性近视散光轴位的验证操作步骤
a.设置度数:-2.75DS,-1.00DC×70。
练习眼设置:

图4 前槽设置度数(+1.00DX70)

图5 镜筒拉伸度数(-2.75DS)
b.影动消解度数:-1.25DS,-1.00DC×70。
c.将消解度数插入模拟练习眼进行跨骑法轴位验证。

图6
d.若用试镜架进行跨骑法轴位验证如图7:红色线条为跨骑轴位1位置(115度);黑色线条为跨骑轴位2位置(25度)。

图7
e.若检测轴位初判为70度,则跨骑1轴位为115度,跨骑2轴位为25度。
①将检影镜光束与初判轴位70度重合,左右摇动检影镜,显示为中和状态;
② 将检影镜光束与跨骑1轴位115度重合,左右摇动检影镜,显示为中和状态;
③将检影镜光束与跨骑2轴位25度重合,左右摇动检影镜,显示为中和状态;
④ 验证结果:各轴位均已呈中和状态,确定初判检测轴位正确。如图8所示:
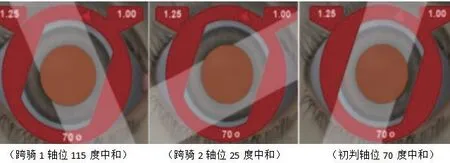
图8
f.若检测轴位误判为65度,则跨骑1轴位为110度,跨骑2轴位为20度。
①将检影镜光束与跨骑1轴位110度重合,左右摇动检影镜,显示为逆动状态;
② 将检影镜光束与跨骑2轴位20度重合,左右摇动检影镜,显示为顺动状态;
③验证结果:初判轴位两侧轴位跨骑1为逆动,跨骑2为顺动,证明初判轴位有误;
④ 根据跨骑验证方法近散追逆的原则,需将误判轴位65度向显示逆动的110度轴位方向调整5度,即逆时针旋转为70度。重新验证调整后轴位两侧跨骑1和跨骑2,影动均为中和状态。如图9所示:

图9
g.若检测轴位误判为75度,则跨骑1轴位为120度,跨骑2轴位为30度。
①将检影镜光束与跨骑1轴位120度重合,左右摇动检影镜,显示为顺动状态;
② 将检影镜光束与跨骑2轴位30度重合,左右摇动检影镜,显示为逆动状态;
③验证结果:初判轴位两侧轴位跨骑1为顺动,跨骑2为逆动,证明初判轴位有误;
④ 根据跨骑验证近散追逆的原则,需将误判轴位75度向显示逆动的30度轴位方向调整5度,即顺时针旋转为70度。重新验证调整后轴位两侧跨骑1和跨骑2,影动均为中和状态。如图10所示:
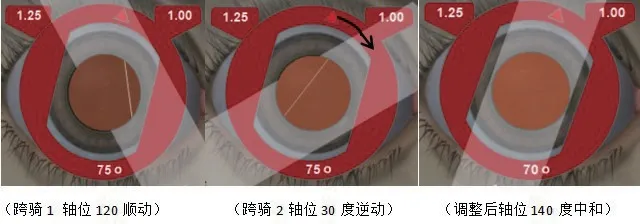
图10
h.将复性近视散光轴位验证操作汇总如下:
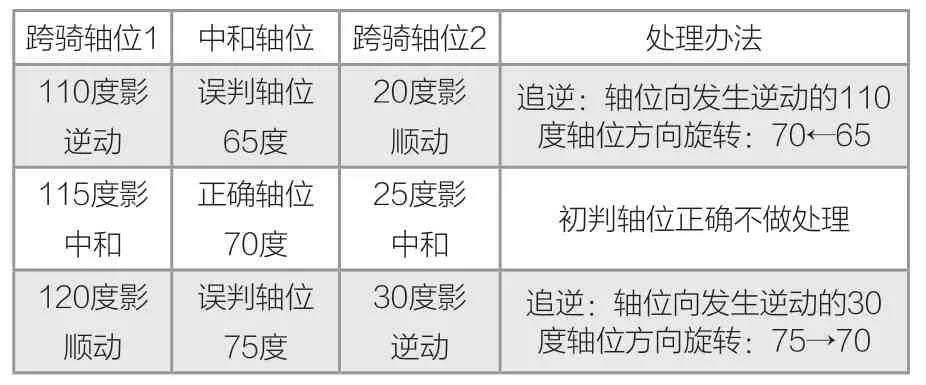
表2
4.2 复性远视散光轴位的验证操作
a.设置度数:+1.75DS,+1.50DC×140。
练习眼设置:

图11 前槽设置度数(-1.50DCX140)

图12 镜筒拉伸度数(+1.75DS)
b.影动消解度数:+3.25DS,+1.50DC×140。
c.将消解度数插入模拟练习眼进行跨骑法轴位验证。

图13
d.若用试镜架进行跨骑法轴位验证如图14:红色线条为跨骑轴位1位置(5度);黑色线条为跨骑轴位2位置(95度)。
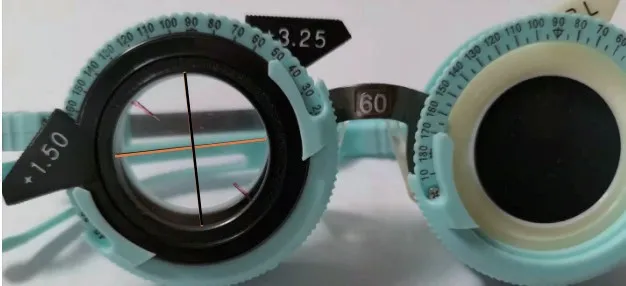
图14
e.若检测轴位初判为140度,则跨骑1为5度,跨骑2为95度。
①将检影镜光束与初判轴位140度重合,左右摇动检影镜,显示为中和状态;
② 将检影镜光束与跨骑1轴位5度重合,左右摇动检影镜,显示为中和状态;
③将检影镜光束与跨骑2轴位95度重合,左右摇动检影镜,显示为中和状态;
④ 验证结果:各轴为均已呈中和状态,确定初判轴位正确。如图15所示:
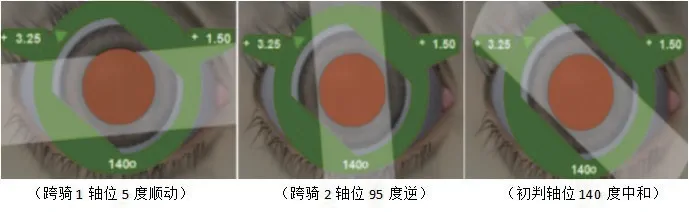
图15
f.若检测轴位误判为135度,则跨骑1为180度,跨骑2为90度。
①将检影镜光束与跨骑1轴位180度重合,左右摇动检影镜,显示为顺动状态;
② 将检影镜光束与跨骑2轴位90度重合,左右摇动检影镜,显示为逆动状态;
③验证结果:初判轴位:两侧轴位跨骑1为顺动,跨骑2为逆动,证明初判轴位有误;
④ 根据跨骑验证远散追顺的原则,需将误判轴位135度向显示顺动的180轴位方向调整5度,即逆时针旋转为140度。重新验证调整后轴位两侧跨骑1和跨骑2,影动均为中和状态。如图16所示:

图16
g.若检测轴位误判为145度,则跨骑1为10度,跨骑2为100度。
①将检影镜光束与跨骑1轴位10度重合,左右摇动检影镜,显示为逆动状态;
② 将检影镜光束与跨骑2轴位100度重合,左右摇动检影镜,显示为顺动状态;
③验证结果:初判轴位两侧轴位跨骑1为逆动,跨骑轴位2为顺动,证明检测轴位有误;
④ 根据跨骑验证远散追顺的原则,需将误判轴位向显示顺动的100方向调整5度,即顺时针旋转为140度。重新验证调整后轴位两侧跨骑1和跨骑2,影动均为中和状态。
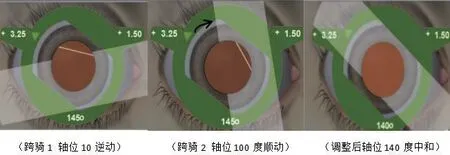
图17
h.将复性远视散光轴位验证操作汇总如下:

表3
猜你喜欢
奥秘(2021年3期)2021-04-12
国际眼科杂志(2020年9期)2020-09-08
中国惯性技术学报(2020年2期)2020-07-24
保健与生活(2020年12期)2020-06-23
中国眼镜科技杂志(2019年9期)2019-11-11
健康必读(上旬刊)(2019年4期)2019-10-21
光学精密工程(2016年6期)2016-11-07
北京航空航天大学学报(2016年12期)2016-02-27
红领巾·探索(2014年1期)2015-03-16
中外医疗(2015年13期)2015-01-11
