
非合作失效航天器绳系拖曳系统研究
2021-12-21 09:09孙瑞琦祁瑞
中国空间科学技术 2021年6期
孙瑞琦,祁瑞
北京理工大学 宇航学院, 北京 100081
1 引言
自1957年10月4日第一颗人造卫星发射升空,人类航天活动日趋频繁,在持续推进航天科技发展的同时,也不可避免地产生了大量太空垃圾,即空间碎片。空间碎片不仅长期占据宝贵的轨道资源,其极高的飞行速度也给在轨人员和资产造成威胁,一旦发生碰撞将产生大量小碎片,有可能进一步引起碰撞链式反应[1-2]。而仅依靠大气阻力等方式清除碎片的速度远比不上不断增加的发射任务等导致的空间碎片的产生速度[3-4],因此,必须对空间碎片进行主动清除。在众多碎片主动清除技术中,绳系拖曳系统[5]因其具有结构简单、质量轻、成本低、系统结构参数可变、捕获距离大等特点,受到国内外学者的广泛关注[6]。作为空间碎片的一类,失效航天器因体积和质量较大,在确定清除目标时应得到足够重视。并不是所有的失效航天器都是因为燃料耗尽而失效,有些航天器可能因器件损坏、通讯模块故障而失效,虽然航天器已不受地面控制,但星上姿态稳定的自动控制模块依然有效,将失效星稳定在某一固定指向。对这类目标开展绳系拖曳清除,会发生拖船与目标在姿态稳定指向上的抗衡效果,从而表现出复杂的动力学与控制特性。
目前已有许多学者展开了关于绳系复合体的研究[7-8],针对其离轨阶段的动力学与控制问题,许多学者初步将拖船和目标简化为质点,观察系统整体运动规律并对控制问题进行研究。Wen等将拖船和失效航天器均简化为质点,基于势能整形与阻尼注入设计了一种张力控制律,在拖曳离轨过程中,只需要系绳长度反馈即可有效地使TST系统达到稳定状态[9];刘海涛等忽略拖船与目标的姿态运动,针对TST系统离轨过程中系绳摆动抑制,设计了系绳张力控制律,并构造了使摆动衰减的期望绳长收放速率[10];王班等针对切向推力作用下绳系复合体拖曳离轨过程中的纵向振动问题提出一种以速度控制为外环、以张力控制为内环的双闭环振动控制法[11]。以上简化模型均忽略了拖船与失效航天器的姿态运动与姿态控制能力,这有可能导致系绳缠绕等问题从而引起系统失稳,因此为更加精细地描述系统运动,许多国内外学者在简化模型的基础上进一步将目标视作刚体,对拖曳过程中的动力学与控制问题进行研究。Aslanov等将拖船视为质点,失效航天器视为刚体,分析了目标惯量、系绳长度等对绳系拖曳系统动力学模型的影响,得出当系绳始终处在张紧状态时,可实现对失效航天器的成功拖曳等结论,针对此系统,进一步分析发现失效航天器的振荡幅度主要取决于系绳[12]。在失效航天器质心与系绳固定点连线和系绳之间的角度较大时,系绳的振荡幅度也会增大,易使系绳松弛进而导致系绳缠结[13];在此基础上,还研究了失效航天器带有剩余燃料[14]与柔性附件[15]时对系统稳定的影响,推导了TST系统在中心重力场中的运动方程,但并未考虑拖船与失效航天器的自主控制能力;为更加准确地描述真实绳系拖曳系统模型,Jaworski等将拖船与失效航天器视作刚体,将系绳看作弹簧—质点模型,在拖船有姿态控制能力的情况下,研究了系绳材质对于目标姿态运动的影响,通过仿真得出较大的系绳弹性系数会增加失效航天器碰撞的风险的结论[16];针对绳网清理失效航天器的绳系复合体拖曳离轨过程,Benvenuto等将绳系复合体中的拖船与失效航天器均视为刚体,研究了离轨过程中系绳松弛与推力器关机时导致的危险情形,将离轨策略分为单次点火和多次点火两种情况,分别给出了避免拖船与失效航天器碰撞的解决方案[17]。更加精细的动力学模型带来了复杂的控制问题,为实现对系统的姿轨控制,Linskens设计了滑模控制器对拖船的相对轨道与姿态进行控制,并将其性能与线性控制器进行对比,但并未给出失效航天器姿态的详细信息[18];Zhang等基于Takagi-Sugeno模糊模型,通过求解一组线性矩阵不等式,获得系统的控制律,在目标有旋的情况下,通过拖船位置和系绳张力控制可以使系统在垂直于系绳的两个方向上稳定[19];Jasper等提出了一种使用带有燃料的火箭上面级与LEO区域失效航天器交会并通过系绳牵引离轨的方法,利用推力输入整形法来减小推力器关机后拖船与失效航天器之间的相对运动来避免碰撞[20-21];为增强系统的控制能力与鲁棒性,Yang等建立了单绳拖曳系统的三维模型,在失效航天器初始旋转的情况下通过系绳连接点偏置控制法与绳长控制使系统稳定;并提出了失效航天器的多绳分叉拖曳系统,在失效航天器有不同初始角速度的情况下进行仿真,说明了所提出系统的有效性[22-23]。
以上研究均未考虑绳系复合体中失效航天器姿态可控的情况。在对具有姿态控制能力的失效航天器进行绳系拖曳时,会发生拖船与目标在姿态稳定指向上的抗衡,拖曳方向易受影响,可能出现拖曳路径漂移,从而导致清除任务的失败。本文针对这一问题开展研究,将拖船与失效航天器均视为刚体,采用牛顿法对绳系拖曳系统进行了动力学建模,并针对失效的自旋稳定航天器和三轴稳定航天器分别开展了拖曳动力学与控制分析,研究了绳系复合体在拖曳离轨过程中的运动状态,为带有残余姿态控制能力的失效航天器的清除与未来的空间攻防提供了参考。
2 系统描述
2.1 模型基本假设
如图1所示,TST系统由拖船、失效航天器(下文中简称“碎片”)和连接两航天器的一根柔性系绳组成,首先,做出如下假设:
1)除地心引力外,忽略其他外部扰动;
2)系绳受剪和受扭量级远小于受拉的量级,因此忽略系绳所受的剪切力和扭矩,只考虑系绳所受拉力;
3)假设连接拖船与碎片的系绳无质量,但具有刚度和阻尼;
4)拖船与碎片均被视为刚体。

图1 TST系统模型示意图Fig.1 Sketch of tethered space-tug system
2.2 坐标系定义
为描述系统各体之间的相对运动,定义如下坐标系:
1)地心赤道惯性系fe(CeXeYeZe)
惯性参考系,以地球质心为中心,Xe沿着春分点方向;Ze垂直于地球赤道平面;Ye位于赤道平面,满足右手定则。
2)轨道坐标系f0(C0X0Y0Z0)
原点C0固连在拖船质心,Z0轴从原点指向地球中心;X0轴在轨道平面内,垂直于轴并指向系统运动方向;Y0轴方向满足右手定则。
3)拖船本体系f1(C1X1Y1Z1)
原点C1固连在拖船刚体质心,三个坐标轴方向分别沿拖船的惯性主轴方向。
4)碎片本体系f2(C2X2Y2Z2)
原点C2固连在碎片刚体质心,三个坐标轴方向分别沿目标的惯性主轴方向。
3 TST系统建模
3.1 坐标系转换
本文中主要涉及的坐标系为:地心赤道惯性系fe、轨道坐标系f0、拖船本体系f1和碎片本体系f2。为了避免拖船与碎片姿态大角度变化时发生奇异,f1系与f2系相对于f0系的姿态分别通过四元数Q1=[q10,q11,q12,q13]T、Q2=[q20,q21,q22,q23]T来描述。
轨道系的三轴向量可表示为:
jo=-(Rs)e×(Vs)e/‖Rs×Vs‖
ko=-(Rs)e/‖(Rs)e‖
io=jo×ko
式中:(Rs)e、(Vs)e分别为拖船在惯性系下的位置矢量与速度矢量。
地心惯性系到轨道系的坐标转换矩阵可以表示为:
Aoe=[io,jo,ko]T
f0系到f1系与f2系的坐标转换矩阵分别为:

欧拉角按轨道坐标系“3-1-2”旋转到本体坐标系,四元数与欧拉角的相应转换关系为:
3.2 系统质心动力学建模
TST系统在轨运行所受外力主要为重力与发动机的推力,拖船与碎片所受的重力可写作:
式中:μ为地球引力常数;ms、md分别为拖船与碎片的质量;Rs、Rd分别为拖船与碎片质心的位置矢量。
由牛顿第二定律,拖船的质心运动动力学方程可以表示为:
(1)
式中:fT为施加在拖船上的推力;Gs为拖船所受重力;Ts为拖船所受系绳拉力。
(2)
式中:Gd为碎片所受重力;Td为碎片所受系绳拉力。
3.3 碎片的质心相对动力学建模
TST系统在高轨运行时,其位置向量的变化远小于位置向量的大小,在惯性系下直接进行计算可能会引起较大误差,因此考虑建立碎片相对于拖船的动力学方程。
碎片相对于拖船的位置矢量为:
rsd=Rd-Rs
将rsd对时间求导,有:
(3)
式中:ω0为轨道系相对惯性系的角速度矢量,满足:
(4)
将式(3)两边同时对时间求导,有:
(d2rsd/dt2)o=d2(rsd)o/dt2+
(5)
将式(2)与式(1)相减,有:
(6)
由坐标系之间的转换关系,可得:
(d2Rsd/dt2)o=Aoe(d2Rsd/dt2)e
(7)
联立式(5)、(6)、(7)可得:
3.4 系绳张力模型
系绳拉力可以使用Kelvin-Voigt模型计算,将其近似为线弹性部分Te和阻尼的Tv线性组合:
T=Te+Tv
系绳的长度变化率可以通过系绳两端点相对速度在系绳方向的投影来计算,即:
式中:VA为系绳在拖船上连接点处的速度矢量;VB为系绳在碎片上连接点处的速度矢量。
系绳两端点的速度在惯性系下可分别写作:
式中:ω1、ω2分别为拖船和碎片本体系相对于惯性系的角速度,由角速度关系可知:ωi=ωoi-ω0,(i=1,2),其中,ωoi为拖船/碎片相对轨道系的角速度矢量;Ae1、Ae2分别为拖船本体系与碎片本体系到惯性系的坐标转换矩阵。
3.5 拖船与碎片姿态动力学
采用四元数描述的拖船与碎片的姿态运动学方程如下:
将拖船与碎片视作匀质长方体刚体,二者所受的重力梯度力矩在各自本体系f1与f2下的分量列阵为:

拖船与碎片的姿态动力学方程可分别写作:
式中:M1、M2分别为拖船与碎片所受的外力矩;Mi=MiG+Mic+MiT,i=1,2,其中,MiG、Mic、MiT分别为拖船与碎片所受的重力梯度力矩、控制力矩与系绳拉力产生的力矩。
3.6 拖船姿态控制模型
为了维持拖曳方向稳定,拖船具有姿态控制能力,当拖船实际姿态偏离期望姿态时,姿态控制系统对拖船施加控制力矩,把姿态稳定在期望值附近。
在拖船控制律的设计中,采用姿态误差四元数与误差角速度来描述姿态运动:

拖船的三个惯性主轴上各安装有一个反作用轮,采用PD控制律,则拖船控制器输出的控制力矩为:
式中:K1p、K1d为反馈增益;M1c为在拖船本体系下表示的控制力矩。
3.7 系统轨道描述与计算
本文采用改进的春分点轨道根数来描述系统的轨道运动,改进的春分点轨道根数与经典轨道根数可通过下式进行转换:
相应的高斯摄动方程如下:
(8)
式中:w=1+fcosL+gsinL;s2=1+h2+k2。 将轨道摄动方程(8)与系统运动微分方程同时积分,可以得出系统在惯性系下的轨道高度及角速度:
4 自旋稳定碎片拖曳分析
4.1 自旋稳定碎片姿态控制模型
当自旋稳定碎片为对称刚体时,章动角ϑ为:

碎片自旋角速度ω2y较大且基本保持不变,因此可以通过减小横向角速度ω2xz的大小来减小章动角ϑ。
假设自旋稳定碎片采用主动喷气控制策略,推力器安装在平行于碎片本体轴Y2方向的星体表面上,如图2所示。
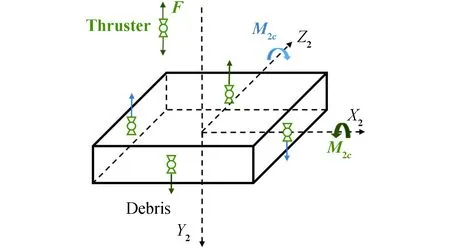
图2 作用在自旋稳定碎片上的推力示意Fig.2 Sketch of thrust on the spin stabilized debris
考虑角速度测量误差,当控制力矩方向为碎片横向角速度的反方向时,消章效果最好。具体的喷气相位选择方法为:
式中:ωon=J2yω2ytanϑe/J2x为喷管开启阈值;ϑe为章动角控制精度。
4.2 算例仿真
初始系统在椭圆轨道运行,拖船与碎片均有姿态控制能力,拖船为三轴稳定,碎片为自旋稳定。建立仿真模型,采用变步长龙格—库塔方程对建立的动力学方程进行积分。系统输入参数如表1所示。
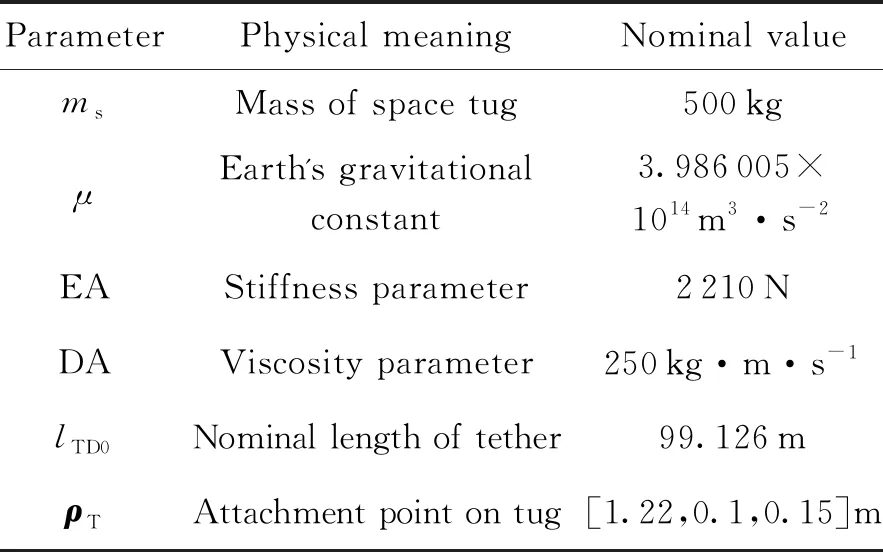
表1 TST系统参数
初始拖船绕各轴无转动,主惯性矩[Jx1,Jy1,Jz1]为[1 500,1 500,500]kg·m2。碎片质量md为400 kg, 主惯性矩[Jx2,Jy2,Jz2]为[700,1 200,700]kg·m2。初始以[0,-30(°)/s,0]旋转,章动角控制精度ϑe取0.01°,期望自旋轴为垂直于轨道面的方向,初始拖船与碎片的本体系与轨道系重合,姿态四元数可表示为[q10,q11,q12,q13,q20,q21,q22,q23]T=[1,0,0,0,1,0,0,0]T,拖船的期望姿态四元数与欧拉角分别为Q1d=[1,0,0,0]T与Ω1=[0°,0°,0°]T;碎片理想姿态为自旋轴Y2与轨道系Y0重合,系绳在碎片上的连接点为[-2.12,0,0],拖船上控制器的参数分别为K1p=[120,120,40]T与K1d=[1 200,1 200,400]T。
假定推力ft大小恒定,为比较不同推力大小对系统的影响,分别取幅值为5 N、10 N、15 N与20 N的推力进行仿真,推力方向均在本体系f1下沿-X1轴方向,随拖船姿态改变而变化,如图3所示。

图3 作用在拖船上的推力示意Fig.3 Sketch of thrust on the space tug
轨道偏心率、轨道高度与轨道角速度如图4所示。
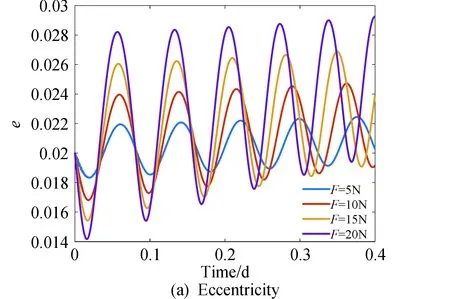

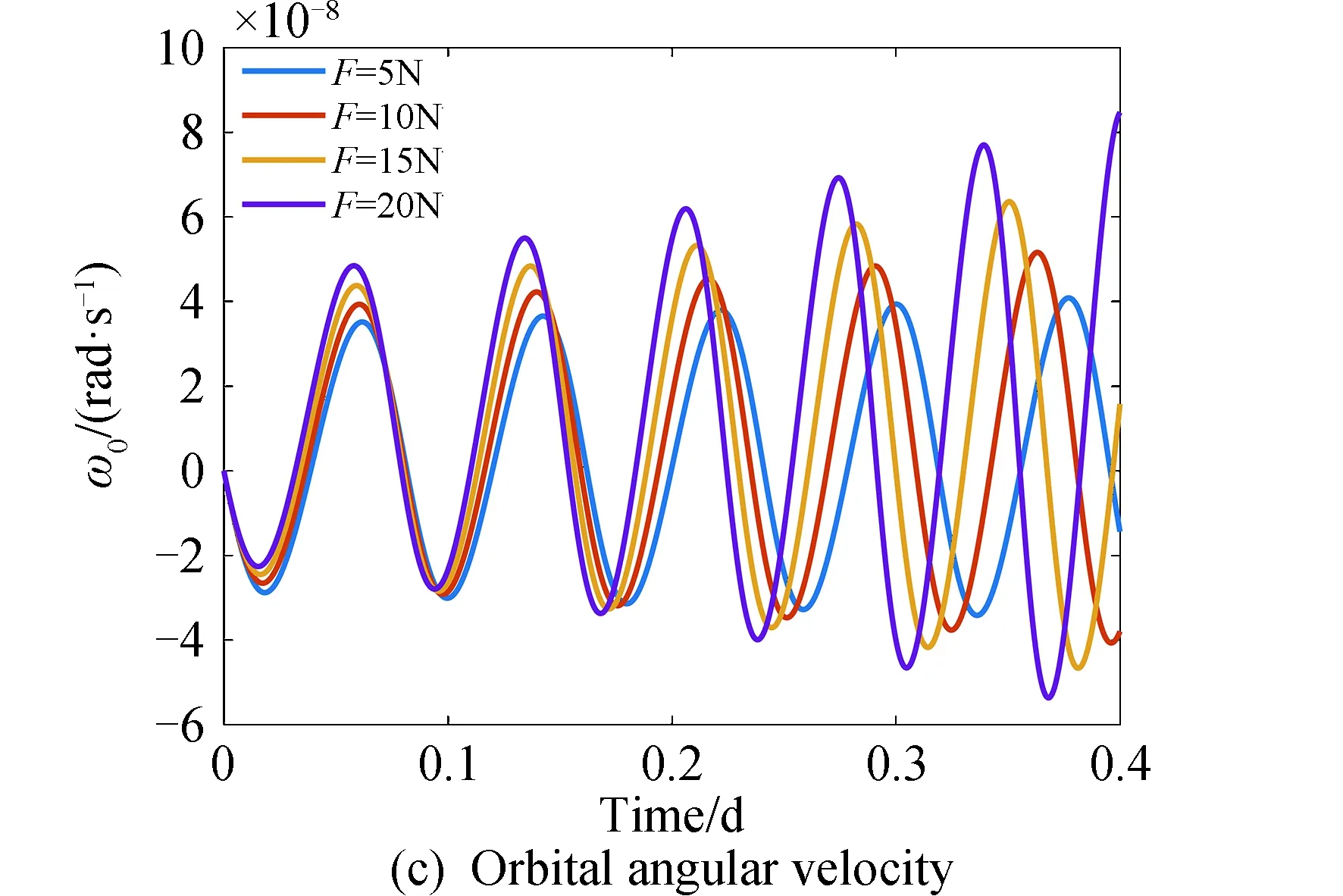
图4 不同推力大小作用下轨道元素的时间历程Fig.4 Evolution of system’s orbit under different thrust
由图4可知,在给定的不同大小推力作用下,每一次振荡都对应着系统绕地球一次完整的旋转。如图4(a)所示,偏心率随时间振荡增大,推力越大,偏心率振幅越大,振荡越剧烈;由图4(b)可知,由于施加在拖船上的推力与系统运动反向,系统的轨道高度沿螺旋线轨迹缓慢降低;相应地,如图4(c)所示,轨道角速度随着时间振荡增大,振幅也随时间缓慢增大。推力越大,轨道高度下降越快,轨道角速度越大,降轨效率越高。
如图5所示,在0.4天的仿真时间内,拖船与碎片的姿态角随时间振荡变化,均呈现出振幅衰减趋势。当系统达到稳定状态时,拖船并未稳定在理想姿态,碎片无法维持自旋;推力越大,姿态角收敛越快,且稳定后振荡较小,TST系统越快达到稳定状态。


图5 不同大小推力作用下拖船与碎片姿态角时间历程Fig.5 Time history of Euler angles of space tug and debris under different thrust
如图6所示,由于推力方向会随拖船姿态变化而变化,在不同大小推力作用下,TST系统的面外角与面内角在给定时间内稳定到不同值,推力越大,面外角最终的稳定值越大,面内角在0°附近以不同振幅随时间振荡变化。

图6 不同大小推力作用下TST系统面内角、面外角时间历程Fig.6 Time history of in-plane angle and out-plane angle of TST system
综合图4、图5与图6可知,推力主要影响系统的轨道,推力越大,系统降轨效率越高;同时推力大小对系统的姿态稳定也起到一定的作用。
发动机推力幅值取10 N,分别改变系绳在碎片上的连接点位置进行仿真,系绳初始连接点的位置如表2所示,连接点1、2与3在碎片星体表面,4在自旋轴上,如图7所示,红色圆点表示系绳在碎片上的连接点;自旋稳定碎片的三轴角速度、拖船碎片的姿态角与系绳张力分别如图8~12所示。

表2 系绳在碎片上的连接点位置
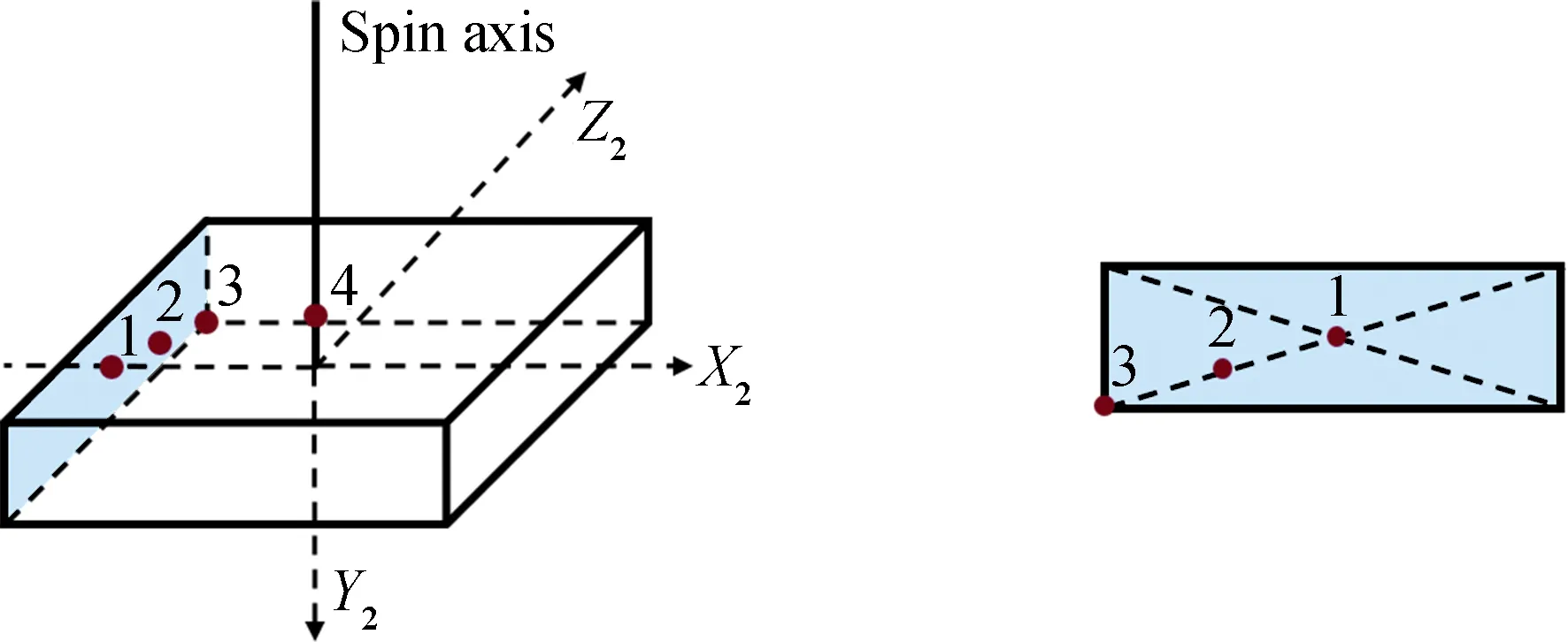
图7 系绳在碎片上的连接点示意Fig.7 Sketch of attachment points on space debris
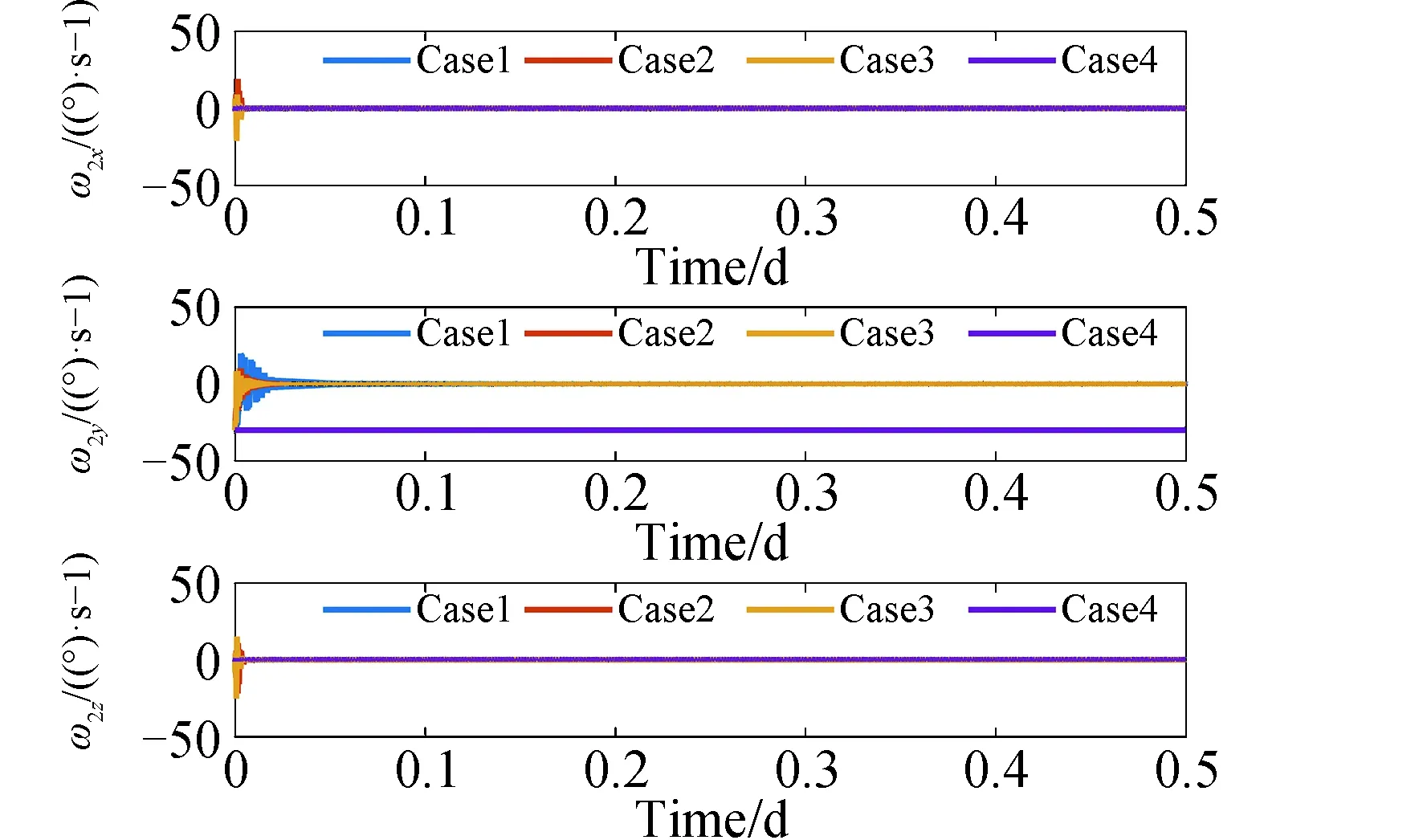
图8 自旋稳定碎片本体系下三轴角速度的时间历程Fig.8 Time history of three-axis angular rate of spin stabilized debris
如图8所示,在给定的仿真时间内,碎片在本体系下沿三个轴的姿态角速度随时间振荡变化,最终稳定在特定值附近以不同的振幅振荡。当系绳连接点在位置1、2和3时,碎片的自旋角速度最终均稳定在0(°)/s附近振荡变化,无法维持自旋状态,连接点越靠近表面边缘,角速度振荡越剧烈。当连接点在碎片的自旋轴上时,由于系绳张力在垂直于碎片自旋轴的方向,不改变目标自旋角速度的大小,只改变其方向,故碎片沿自旋轴方向的角速度大小一直保持在-30(°)/s,沿本体系X2、Z2方向的角速度最终在0(°)/s附近小幅度振荡变化。
如图9与图10所示,在给定的仿真时间内,拖船与碎片的三个姿态角随时间振荡变化,除碎片的俯仰角θ2之外,均呈现出收敛趋势;拖船与碎片的姿态角在初始阶段,系绳从松弛突然张紧,系绳张力在拖船与碎片上产生力矩,姿态角偏离理想状态;在控制器与系绳的共同作用下,拖船的三个姿态角并未收敛到期望姿态,最终稳定到不同特定值附近振荡;当系绳连接点在碎片自旋轴上时,碎片的滚转角φ2与偏航角ψ2最终在[-10°,10°]与[-78°,-88°]内振荡。如图10所示,θ2在[-180°,180°]内不断振荡,这是由于将四元数转换为欧拉角时,反正切函数的值域有限制,由碎片的三轴角速度可知,碎片应为单向旋转,θ2实际不断增大,并非振荡变化,TST系统的最终状态如图11所示,碎片自旋轴由垂直于轨道面变为在轨道面附近振荡,碎片绕自旋轴以-30(°)/s的角速度旋转。

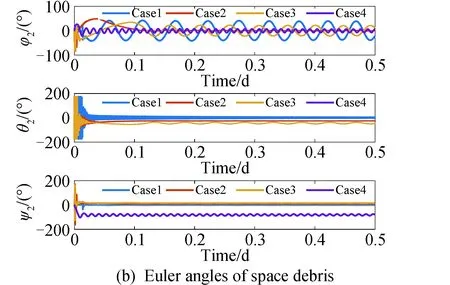
图9 拖船与碎片姿态角时间历程Fig.9 Time history of Euler angles of space tug and spin stabilized debris

图10 当系绳连接点在碎片自旋轴上时碎片θ2的时间历程Fig.10 Time history of θ2 when attachment point is on spinning axis

图11 当系绳连接点在碎片自旋轴上时TST系统稳定后的状态示意Fig.11 TST system in equilibrium state when attachment point is on spinning axis

图12 系绳张力大小的时间历程Fig.12 Time history of tether tension
如图12所示,随着拖船与碎片之间距离增大,系绳张紧;而后,张力大小随时间振荡减小。在系绳阻尼作用下,系统逐渐趋于稳定,系绳在拖曳过程中始终处于张紧状态,张力最终稳定在4.45 N附近振荡变化。
5 三轴稳定碎片拖曳分析
5.1 三轴稳定碎片姿态控制模型
在碎片控制律的设计中,采用姿态误差四元数与误差角速度来描述姿态运动。

碎片的三个惯性主轴上各安装有一个反作用轮,采用PD控制律,则碎片控制器输出的控制力矩为:
式中:K2p、K2d为反馈增益;M2c为在碎片本体系下表示的控制力矩。
5.2 算例仿真
初始系统在椭圆轨道运行,同理采用变步长龙格—库塔方程对系统动力学方程进行积分。系统输入参数与表1相同,拖船主惯性矩[Jx1,Jy1,Jz1]为[1 500,1 500,500]kg·m2。碎片质量md为700 kg, 主惯性矩[Jx2,Jy2,Jz2]为[2 000,2 000,700]kg·m2。
初始拖船与碎片绕各轴无转动,拖船与碎片初始姿态四元数分别为[q10,q11,q12,q13]T=[1,0,0,0]T与[q20,q21,q22,q23]T=[cos (π/8),0,0,sin (π/8)]T,相对轨道系的期望姿态四元数分别为Q1d=[1,0,0,0]T、Q2d=[cos (π/8),0,0,sin (π/8)]T,拖船与碎片期望欧拉角分别为Ω1=[0°,0°,0°]T与Ω2=[0°,0°,45°]T。碎片初始姿态示意图如图13所示。
拖船上控制器的参数分别为K1p=[120,120,40]T与K1d=[1 200,1 200,400]T;碎片上控制器的参数分别为K2p=[160,160,56]T与K2d=[1 600,1 600,560]T。假定推力Ft为10 N,大小恒定,在本体系f1下沿-X1轴方向,会随拖船姿态改变而变化。改变系绳在碎片星体表面连接点的位置进行仿真,系绳初始连接点的位置如表3所示,连接点如图13所示,红色圆点表示系绳在碎片上的连接点;拖船碎片的姿态角、碎片控制器输出的力矩与系绳张力如图14-图16所示。

表3 系绳在碎片上的连接点位置


图14 拖船与碎片姿态角的时间历程Fig.14 Time history of Euler angles of space tug and three-axis stabilized debris
如图14所示,在0.5 d的仿真时间内,拖船与碎片的姿态角均随时间振荡变化,最终均未稳定至期望姿态Ω1=[0°,0°,0°]T与Ω2=[0°,0°,45°]T;由于系绳连接在星体表面的不同位置,张力作用对碎片产生的力矩不同,故三轴姿态角最终稳定在不同特定值附近,值的大小与系绳连接点位置有关;当连接点在位置1、2与3时,碎片的三个姿态角最终分别稳定到[0°,0.1°,35.5°]、[-4.1°,-4.5°,41°]与[-7.2°,-7°,-44°]附近。
如图15所示,在给定的仿真时间内,碎片的控制器输出的三轴力矩呈现出随时间振荡收敛的趋势。碎片在初始受到系绳张力时,姿态产生变化,此时控制器通过输出控制力矩来将碎片姿态保持在理想位置,结合图14可知,TST系统达到稳定状态时,碎片的姿态角并未收敛至期望位置,故控制器输出力矩不为0,稳定后的姿态偏离理想姿态越多,控制器输出的控制力矩越大。
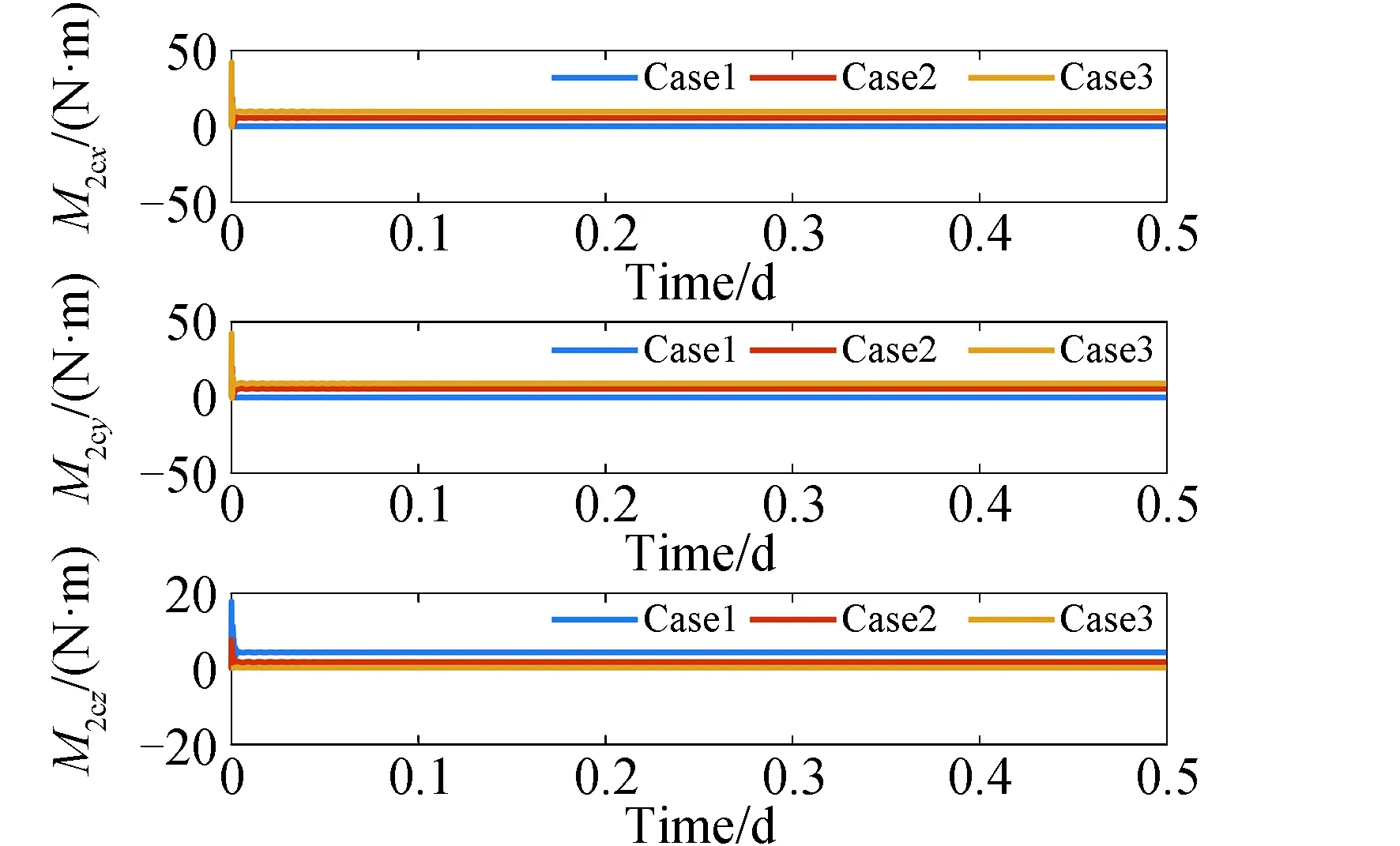
图15 碎片控制器三轴输出力矩Fig.15 Output torque of debris controller
如图16所示,系绳在拖曳过程中始终处于张紧状态,系绳连接点对系统达到稳定状态时系绳的张力并无明显影响。
6 结论
本文针对带有残余姿态控制能力的空间碎片的绳系拖曳系统,采用牛顿法建立了系统的动力学模型,考虑目标稳定方式分别为自旋稳定与三轴稳定两种情况,分析了拖曳系统动力学与控制行为,并研究了不同系绳连接点的影响,通过仿真得到下列结论:
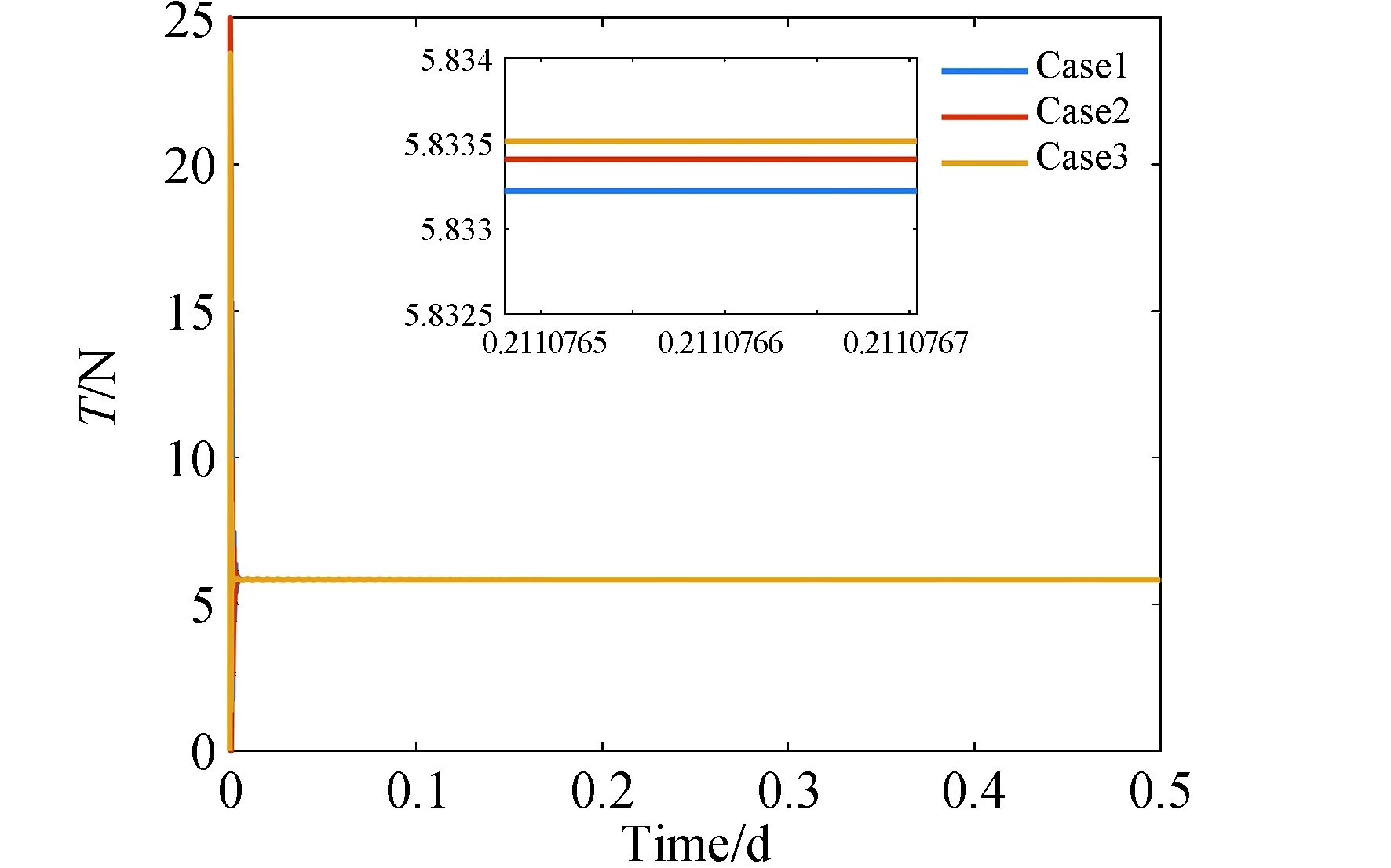
图16 系绳张力大小的时间历程Fig.16 Time history of tether tension
1)推力主要影响系统的轨道,同时对拖船与碎片的姿态稳定也起到一定的作用;推力越大,系统降轨效率越高,拖船与目标的姿态角越快达到稳定状态。
2)当目标为失效自旋稳定碎片时,若系绳连接点在星体表面,碎片无法保持自旋状态,拖船与目标的三个姿态角均在控制律作用下逐渐稳定到特定值附近;若系绳连接点在星体自旋轴上,则仅自旋轴方向发生改变,自旋角速度变化不大,此时系绳会出现扭曲。
3)当目标为失效三轴稳定碎片时,拖曳组合体的姿态在目标姿态控制与拖船拖曳的双方抗衡下逐步收敛,收敛后的组合体稳定姿态与目标姿态控制能力和拖船推力幅值等系统参数有关。
4)本文研究了利用TST系统清除带有姿态控制能力的失效航天器中的动力学与控制问题,为此类空间碎片的安全清除与未来空间攻防提供了参考。后续将进一步展开针对使用TST系统清除质量参数、惯量参数与控制参数未知的失效航天器中的未知参数估计问题与系绳张力控制律的研究。
猜你喜欢
上海船舶运输科学研究所学报(2022年3期)2022-08-05
太空探索(2022年3期)2022-03-28
中国船检(2021年11期)2021-11-22
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
中学课程辅导·教师通讯(2018年10期)2018-09-04
新课程·小学(2017年8期)2017-09-20
中学生数理化·高一版(2017年3期)2017-07-08
教育教学论坛(2017年26期)2017-06-19
职工法律天地·下半月(2016年3期)2017-05-23
