基于模糊控制的节水智能灌溉系统设计
2021-12-22 15:24刘振奎
安徽农学通报 2021年23期
刘振奎






摘 要:中国是农业大国,在由农业大国向农业强国转变的道路上,农业灌溉用水量是迫切需要解决的问题。由于土壤含水率是一个复杂的非线性的变化过程且灌溉系统难以建立一个精确的数学模型,因而设计了基于模糊控制的节水智能灌溉系统。该系统以土壤水分误差和误差变化率作为输入量,灌溉时间为输出量,模糊规则以专家经验为基础设置,最后通过Matlab仿真验证,表明该系统可以有效地实现节水智能灌溉的功能。
关键词:农业灌溉;模糊控制;节水智能;Matlab仿真
中图分类号 S277 文献标识码 A 文章编号 1007-7731(2021)23-0143-03
Design of Water-saving Intelligent Irrigation System Based on Fuzzy Control
LIU Zhenkui
(College of Electrical Engineering, Dalian Jiaotong University, Dalian 116028, China)
Abstract: As China is a large agricultural country, water consumption for agricultural irrigation is an urgent problem to be solved on the road of transforming into a powerful agricultural country. Because the soil moisture content is a complex nonlinear change process and it is difficult to establish an accurate mathematical model for the irrigation system, a water-saving intelligent irrigation system based on fuzzy control is designed. The system is based on soil moisture error and error rate of change as input, irrigation time as output, fuzzy rules set on the basis of expert experience, and finally through Matlab simulation verification, shows that the system can effectively achieve the function of water-saving intelligent irrigation.
Key words: Agricultural irrigation; Fuzzy control; Water-saving intelligence; The Matlab simulation
近三十年來,我国农业生产一直占全国用水总量的主要部分。水是生命之源,随着我国农业生产的大力发展,农业灌溉的方式越来越多元化,在由农业大国向农业强国的转变道路上,灌溉用水量增多和水资源浪费问题是我们需要去重视和改善的。从节水的角度出发,农业用水量的焦点主要在灌溉用水的利用率这个问题上。根据水利部的统计,我国节水灌溉面积达到0.378亿hm2,农业灌溉用水量约占全社会的56%左右,在保证粮食产量稳步增加的情况下,农业用水总量基本保持稳定,这都得益于节水灌溉。
目前,大多数的节水灌溉主要依靠于人工经验来手动控制灌溉时间,还有少数一部分是半自动控制,即设置电磁阀开启和持续时间自动运行。以上灌溉方式都比较粗糙,不能根据植物在不同生长阶段的不同环境进行灵活灌溉[1]。
为此,本研究设计了一种基于模糊控制的节水智能灌溉系统,主要由以下3个部分组成,分别是有Tinker board和TFT液晶屏组成的总控端,ESP8266单片机搭配继电器组成终端节点来控制土壤湿度测试仪,路由器OpenWrt系统组建的局域网络。最终通过设置模糊控制器来具体控制终端节点上电磁阀打开的时间,即灌溉的时间,从而最大化地达到节水地目的。
1 系统总体设计
本设计是基于模糊控制的节水智能灌溉系统,从节水和智能的角度出发,将模糊控制和智能设备结合起来,以提高农业用水利用率,从而达到节水的目的。智能灌溉系统的结构如图1所示。
路由器作为整个网络的中心,实现整个系统联网工作。路由器通过刷入OpenWrt系统,然后在路由器中绑定服务器Mac地址,这时路由器会自动分配IP地址给服务器,当然也可以通过路由器手动分配给服务器IP地址,最后通过终端节点上ESP8266单片机上的Wi-Fi模块联网到作为服务器的总控端,最终组建好整个系统的局域网,使系统稳定有效的执行操作命令。根据终端节点上的土壤湿度测试仪实时地能够检测到土壤的体积含水率,即土壤湿度。
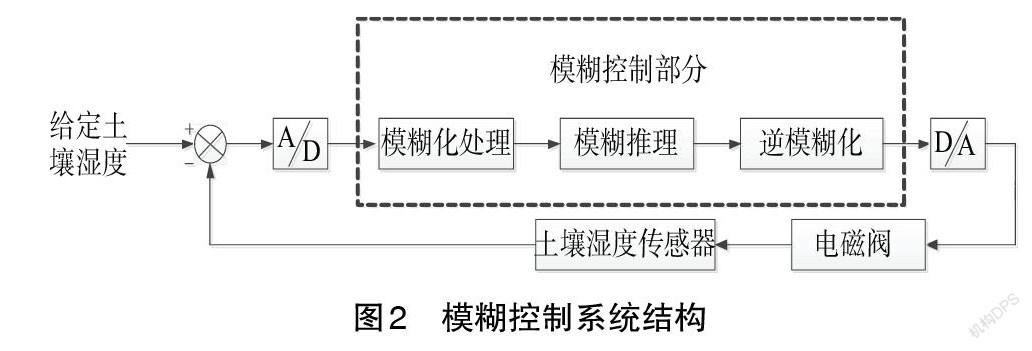
由土壤湿度传感器测到的土壤具体湿度,实时地反馈到总控端的显示屏上,然后采用模糊控制策略计算出作物灌溉的需水量,最终设置终端节点上电磁阀打开的时间,实现节水灌溉的目的[2]。模糊控制系统结构如图2所示。
2 模糊控制决策设计
2.1 模糊控制理论基础 模糊控制是以模糊集合理论和模糊推理为基础,可类比人完成特定的控制工作。模糊控制是用于非线性控制的方法,适合于非线性时变和纯滞后的系统控制[3]。在灌溉中,作物是否需要灌水主要取决于土壤湿度。本文设计的模糊控制器是根据专家对于灌溉的经验总结并归纳出控制规则,通过计算机来实现自动控制。根据模糊推理的设计,来实时地调整灌溉的时间,且调整的是精确值,即电磁阀打开的时间。
2.2 模糊控制器
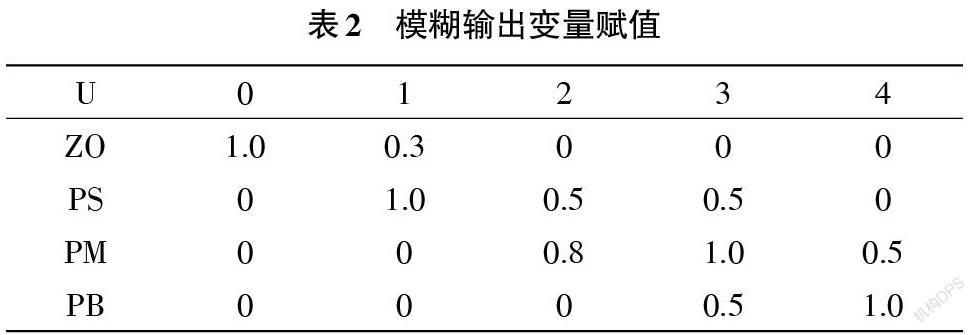
2.2.1 模糊化 模糊控制器的设计包括的部分有输入模糊化,根据专家经验和数据总结建立规则库,模糊推理和逆模糊化。本设计中,设r为最适合作物生长的土壤湿度值,y为当下实际测得的土壤湿度值,则输入为e=r-y,即土壤水分误差。那么,土壤水分误差变化率ec=e(i+1)/ei(i∈N,即不同时刻下记录的e的值)。设置误差e的基本(物理)论域为[-6%,6%],误差变化率ec的基本论域为[-1%,1%]。设e和ec相对应的模糊变量为SE和SEC,在建立模糊集的时候并非越多越好,因为数量的增多会加大模糊推理的计算量,故3至10个为最适宜,从这个角度出发,定义SE和SEC的模糊子集各取的7个语言值,即{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,ZO,PS,PM,PB},则变量的量化(模糊)论域均为{-3,-2,-1,0,1,2,3}。模糊控制最终控制的是电磁阀打开的时间U,定义其基本论域为[0,60],模糊子集为{零,短时,中时,长时},简记为{ZO,PS,PM,PB},量化论域为{0,1,2,3,4}。
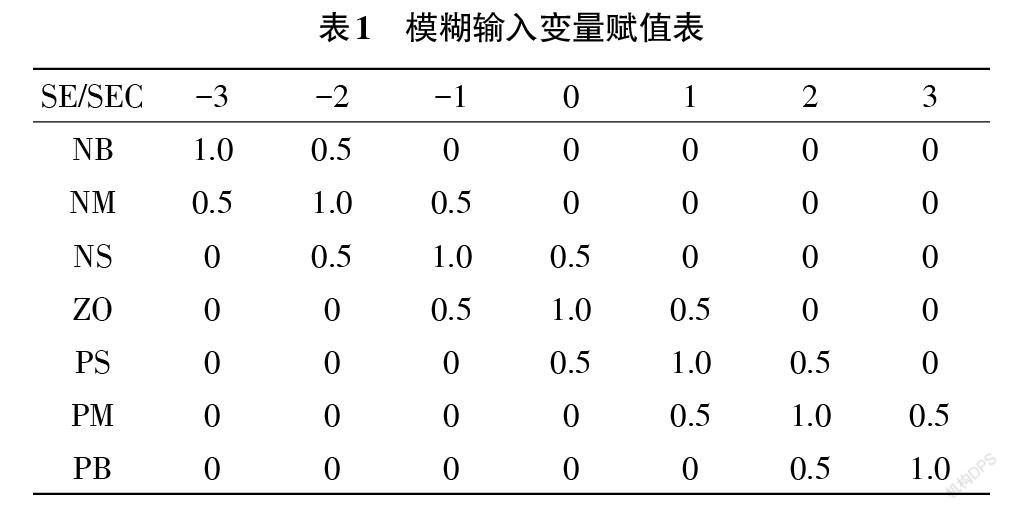
2.2.2 模糊变量赋值 从模糊集同时满足完备性和一致性的角度出发,将模糊输入变量SE和SEC、模糊输出变量U合理赋值,如表1和表2所示。
2.2.3 模糊控制规则和决策设计 本文采用的是Mamdani直接推理法,根据农业部门长期对于农业灌溉的实践和经验总结,可设置模糊规则如表3所示。当SE为NB或NM时,SEC无论怎样变化都不进行灌溉,即表中为ZO。在表中间内容的ZO、PS、PM、PB指的是灌溉时间从0~60min依次增多。在实际应用中可根据具体情况合理调整模糊规则,以达到最佳的灌溉效果。
由上述模糊控制规则和隶属度函数,可利用Matlab提供的模糊控制工具箱,构建模糊推理控制系统。采用最大隶属度法进行逆模糊化,即可求得电磁阀打开时间的模糊控制表,如表4所示。表4所得到的是控制量的量化等級,然后在与比例因子相乘才能得到执行结果 [4]。当为1,则表示灌溉的时间为15min,2表示灌溉时间为30min,依次类推[5]。
3 模糊控制试验仿真`
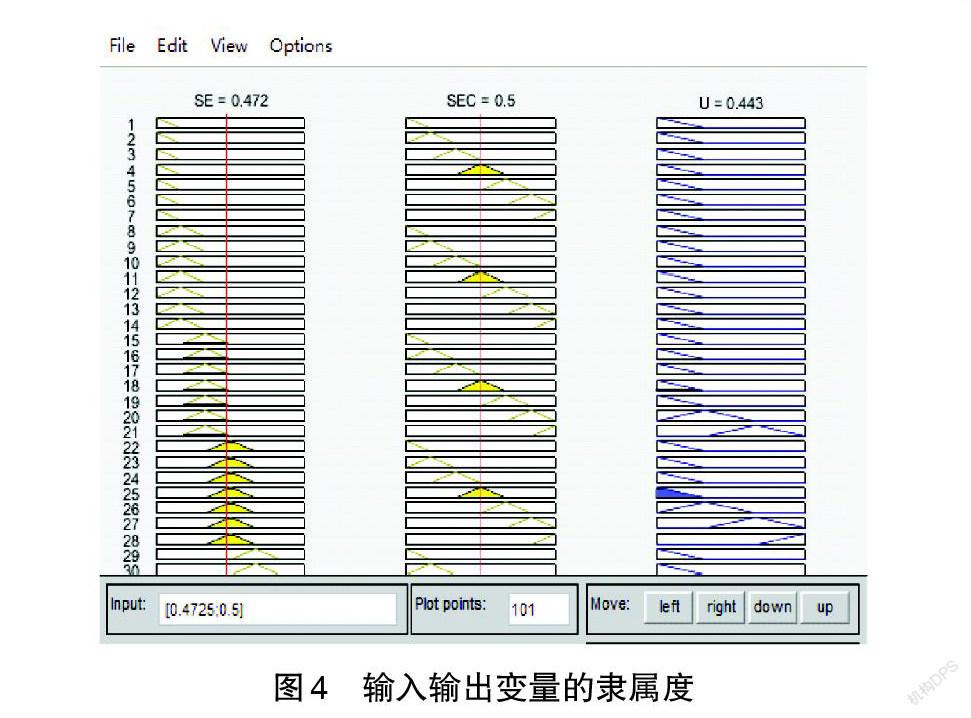
3.1 Matlab设置参数 可根据隶属度赋值和模糊控制规则建立模糊控制系统,通过Matlab实现设置的49条模糊控制规则和Rule Viewr如图3、图4所示。
3.2 模糊控制Simulink仿真 为了验证节水智能灌溉的有效性,使用Simulink工具箱对上述模糊控制建立模型,如图5所示。模型仿真结果如图6所示。
通过语言中模糊逻辑工具箱和模块对节水模糊控制器进行输入输出变量曲面分析和模糊控制器建模和仿真,结果表明,智能节水模糊控制器超调量小、响应快、无振荡、系统平稳性好[6]。
4 结论
基于灌溉系统具有大惯性、非线性与时滞的特点,并且土壤含水率是一个非线性且复杂的变化过程,很难对其建立准确的数学模型,采用传统的喷灌、滴灌等很难实现有效地节水灌溉的效果,而通过模糊控制能很好地弥补该缺陷。为此,本研究设计了基于模糊控制的节水智能灌溉系统。经过验证,该系统运行效果良好,解决了根据土壤水分适时、适量、自动灌溉的问题,并能保证土壤合适的水分,对于作物生长、发育、节约用水等都具有非常重要的意义。
参考文献
[1]吴迪,刘天宇,宋涛,等.基于模糊控制的智能节水灌溉控制系统设计[J].江苏农业科学,2018,46(23):245-249.
[2]李聪聪,高立艾,李云亮.基于物联网技术和模糊控制的智能节水灌溉系统[J].节水灌溉,2013(12):83-86.
[3]梁月云,崔天时,何亚非.温室节水灌溉系统模糊控制器设计及MATLAB仿真[J].农机化研究,2014,36(06):202-205,209.
[4]郭正琴,王一鸣,杨卫中,等.基于模糊控制的智能灌溉控制系统[J].农机化研究,2006(12):103-105,108.
[5]周李涌,高丽丽,高鹭.论模糊控制器中量化因子和比例因子的作用[J].内蒙古科技与经济,2004(19):61-62.
[6]罗杰.基于模糊控制智能灌溉控制系统研究[D].吉林:吉林大学,2011.
(责编:张宏民)
猜你喜欢
现代情报(2016年11期)2016-12-21
科学与财富(2016年26期)2016-12-01
科技视界(2016年21期)2016-10-17
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
考试周刊(2016年11期)2016-03-17
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22