
一类具有收获项的双时滞May合作系统的Hopf分支
2022-03-26 07:04王月月吕堂红周林华
东北师大学报(自然科学版) 2022年1期
王月月,吕堂红,周林华
(长春理工大学数学与统计学院,吉林 长春 130022)
0 引言
合作是物种之间的基本关系之一,在过去的几十年里,学者们对于合作模型进行了广泛研究[1-5].1976年May首次提出两种群合作模型,分析发现如果不对模型系数加以限制,其解可能无界.为了克服解的无界情形,May进一步考虑了种群内部密度制约因素,提出修正模型.此后对于May合作系统的研究多基于修正模型,如Cui等[6]提出并研究了非自治的May合作模型,给出了保证系统存在唯一的全局吸引的正周期解的充分性条件;Wei等[7]提出并探讨了具有捕获项的May合作系统,分析了系统正平衡点的存在性和稳定性.
2014年,杨坤等[8]研究了如下形式的具有避难所的May合作系统:
(1)
其中:x1,x2代表两个种群的密度;r1,r2分别表示两种群的内禀增长率;c1,c2分别表示两种群的种内竞争强度;bi表示xi种群与另一种群的合作系数;0
在实际问题中,影响种群密度的因素有很多.一方面,为了控制对生物资源的过度开发人类采取了多种措施,如设立保护区、制定法律法规保证适度开采等,希望既可以维持种群的持续生存,又能使经济得到较好发展.另一方面,时滞效应几乎存在于每种生物关系中,对于系统的稳定性产生极大的影响.因此,本文在模型(1)的基础上,考虑人为开采与捕捞作用,分别引入收获项e1x1和e2x2,考虑种群x1具有成熟期和孕育期[9]分别引入时滞τ1和τ2,提出如下具有避难所和收获项的双时滞May合作系统:
(2)
其中:τ1表示x1种群的成熟期;τ2表示x1种群的孕育期;eixi表示xi种群的收获项,ei>0,i=1,2;其他参数意义同模型(1).对于May合作系统的研究,学者们很少考虑到模型(2),对于此模型的动力学行为研究也不多见,而这正是本文关注的焦点.
1 正平衡点的存在性
考虑到种群的生物学意义,本节讨论系统(2)正平衡点E*的稳定性状况.
定理1 如果r1>e1且r2>e2,则系统(2)有唯一正平衡点
证明如果系统(2)存在平衡点,则应满足方程组
(3)
由(3)式中的第2个方程可得
(4)
将(4)式代入(3)式中的第1个方程,有
(5)
其中:
P1=(r2-e2)r1b1b2c1(1-m)+r2b2c2(1-m)[r1(1-m)+r1a1c1];
P2=[r1(1-m)+r1a1c1](r2+r2a2c2)+(r2-e2)r1a2b1c1-
(r1-e1)(1-m)b2[(r2-e2)b1+r2a1c2];
P3=(e1-r1)[(r2-e2)a2b1+a1(r2+r2a2c2)].
不难发现,当r1>e1且r2>e2时,定理1成立.
2 局部稳定性和Hopf分支
系统(2)在正平衡点E*处的Jacobi矩阵为
(6)
其中:
则系统(2)的特征方程为
λ2+Aλ+B+(Cλ+D)e-λτ1+Ee-λτ2=0.
(7)
其中:
针对时滞的不同组合,考虑以下5种情形:
情形1τ1=τ2=0.此时系统(2)的特征方程(7)变为
λ2+(A+C)λ+B+D+E=0.
(8)
又因为A+C>0,根据Routh-Hurwitz准则,若假设:
(H1)B+D+E>0.
则系统(2)的正平衡点E*是局部渐近稳定的.
情形2τ1>0,τ2=0.此时系统(2)的特征方程(7)变为
λ2+Aλ+B+E+(Cλ+D)e-λτ1=0.
(9)
令λ=iω1(ω1>0)是该方程的根,代入到(9)式有
(10)
两边分别平方相加可得
(11)

p1=A2-C2-2(B+E),q1=(B+E)2-D2.

(H2)p1>0,q1>0.
则(11)式无正根,因此方程(11)的所有根均具有负实部.进一步假设
(H3)q1<0.

(12)

(13)
对(9)式关于τ1求导,有
(14)
经计算得
(15)
如果(H5)成立,从而得到横截性条件
于是有如下结论:
定理2 对于系统(2),当τ1>0,τ2=0,且(H1)成立时:
(1) 如果(H2)成立,则当τ1≥0时,系统(2)的平衡点E*是局部渐近稳定的.
(2) 如果(H5)成立,则存在一个τ10,使得当τ1∈[0,τ10)时,平衡点E*是局部渐近稳定的;当τ1>τ10时,平衡点E*不稳定;当τ1=τ10时,系统(2)发生Hopf分支.
情形3τ1=0,τ2>0.此时系统(2)的特征方程(7)变为
λ2+(A+C)λ+B+D+Ee-λτ2=0.
(16)
令λ=iω2(ω2>0)是该方程的根,代入到(16)式有
(17)
从而
(18)

p2=(A+C)2-2(B+D),q2=(B+D)2-E2.
经计算p2>0,q2>0,则有
定理3 对于系统(2),当τ1=0,τ2>0时,在(H1)条件下平衡点E*仍然保持局部渐近稳定.
情形4τ1=τ2=τ>0.
定理4 对于系统(2),τ1=τ2=τ.当τ∈[0,τ30)时,平衡点E*是局部渐近稳定的;当τ>τ30时,平衡点E*是不稳定的;此外在τ=τ30处,发生Hopf分支.其中
(19)
证明同情形2.
情形5τ1>0,τ2>0.
考虑(7)式中τ1在稳定的区间,τ2作为参数.设λ=iω4为(7)式的根,代入到(7)式有
(20)
消去τ2,有
(21)
(H6) (21)式有有限个正根.

(22)
i=1,2,…,j,k=0,1,2,…
令
对(7)式关于τ2求导,有
(23)
经计算有
(24)
其中
T=2ω*cosω*τ*+Asinω*τ*+(C-τ1D)sinω*(τ*-τ1)-τ1Cω*sinω*(τ*-τ1).
又因为ω*E<0,假设
(H7)T<0.
则
由上述讨论,可得:
定理5 对于系统(2),固定τ1∈[0,τ10),若(H1),(H6)和(H7)成立,则当τ2∈[0,τ*)时,平衡点E*是局部渐进稳定的;若τ2>τ*,平衡点E*不稳定;当τ2=τ*,系统(2)发生Hopf分支.
3 Hopf分支方向及其稳定性
研究在τ1=τ2=τ=τ30条件下,运用Hassard的中心流形定理和规范型理论,得到决定系统(2)的Hopf分支性质的表达式.
令u(t)=(u1(t),u2(t))T∈R2,其中u1(t)=x1(τt),u2(t)=x2(τt),τ=τ30+μ,μ∈R,则系统(2)在C=C([-1,0],R2)上变为一般的泛函微分方程
(25)
其中Lμ:C→R2,F:R×C→R2分别由以下形式给出:
(26)
F(μ,φ)=(τ30+μ)(F1(μ,φ),F2(μ,φ))T.
(27)
这里:
φ=(φ1,φ2)∈C([-1,0],R2),
其中:
因此,由Riesz表示定理,能找到一个有界变差的二阶矩阵η(θ,μ):[-1,0]→R2使得
(28)
这里
δ(θ)是Dirac-delta函数.
对于φ∈C1([-1,0],R2),定义
对于ψ∈C1([-1,0],(R2)*),定义A=A(0)的伴随算子A*:
双线性型:
设A和A*对应于特征根iω3τ30与-iω3τ30的特征向量分别为q(θ)和q*(s),于是
A(0)q(θ)=iω3τ30q(θ),A*(0)q*(s)=-iω3τ30q*(s).
通过计算,可以得到:
这里

利用文献[10]给出的算法,并用与文献[11-12]类似的计算过程,可以得到用于确定Hopf分支方向以及分支周期解稳定性的系数:
其中W20(θ),W11(θ)的计算结果如下:

这就意味着
(29)
令C1(0)由(29)式给出,
(30)
易得出μ2,β2,T2的值.因此有
定理6 当τ=τ30时,(30)式的各个表达式中心式决定了分支周期解在中心流形上的性质,因此得出下面的结论:
(1)μ2确定Hopf分支的方向.如果μ2>0(μ2<0),则Hopf分支是超临界的(次临界的).
(2)β2确定分支周期解的稳定性.如果β2<0(β2>0),则分支周期解是稳定的(不稳定的).
(3)T2确定分支周期解的周期.如果T2>0(T2<0),则分支周期解的周期增加(减少).
4 数值模拟
为了验证上面分析所得的理论结果,选择适当的参数,考虑以下系统:
(31)
当τ1>0,τ2=0时,条件(H1)和(H3)满足,通过计算有ω10≈0.900 8,τ10≈1.942 3,横截性条件满足.因此当τ1=1.8<τ10≈1.942 3时,平衡点E*是渐近稳定的(见图1);当τ1=2>τ10≈1.942 3时,平衡点E*失去稳定性(见图2).

图1 当τ1=1.8<τ10≈1.942 3,τ2=0时,系统(31)的波图和相图

图2 当τ1=2>τ10≈1.942 3,τ2=0时,系统(31)的波图和相图
当τ1=τ2=τ时,B2-(D+E)2≈-1.165 2<0,系统有正根,通过计算可得ω3≈0.862 9,τ30≈2.190 9,C1(0)≈0.000 1-0.001 2i,μ2≈-0.000 1,β2≈0.000 2,T2≈0.002 4.
由定理6可知,系统(31)的Hopf分支是次临界的,分支周期解是不稳定的且分支周期增大.当τ=1.9<τ30≈2.190 9时,平衡点E*是渐近稳定的(见图3);当τ=2.2>τ30≈2.190 9时,平衡点E*失去稳定性(见图4).

图3 当τ1=τ2=τ=1.9<τ30≈2.190 9时,系统(31)的波图和相图

图4 当τ1=τ2=τ=2.2>τ30≈2.190 9时,系统(31)的波图和相图
当τ1>0,τ2>0时,固定τ1=2.1,通过计算可得ω*≈908 6,τ*≈2.794 6.
(H7)T≈-2.801 2<0.因此当τ2=2.0<τ*≈2.794 6时,平衡点E*是渐近稳定的(见图5);当τ2=3.2>τ*≈2.794 6时,平衡点E*失去稳定性(见图6).
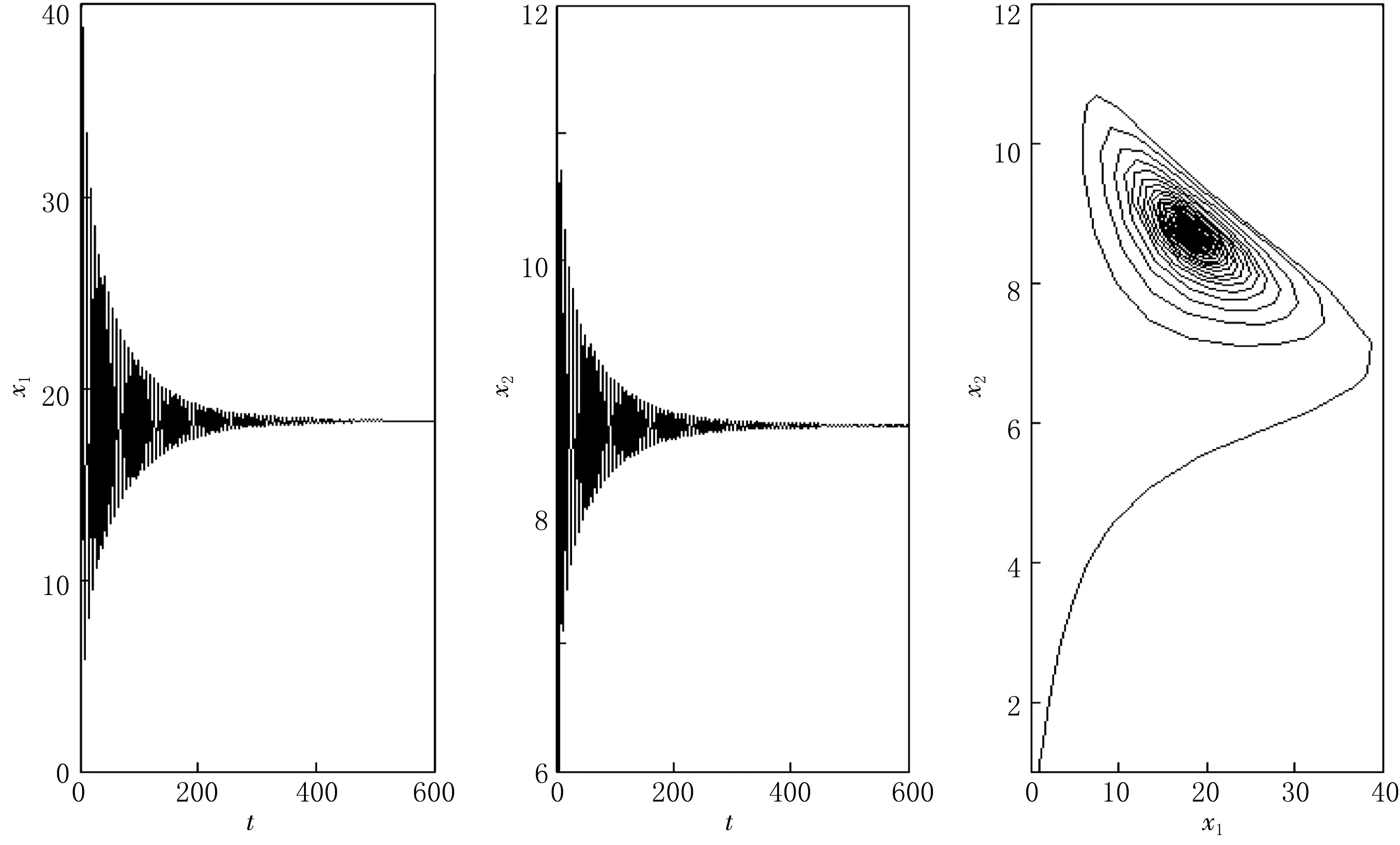
图5 当τ1=2.1,τ2=2.0<τ*≈2.794 6时,系统(31)的波图和相图
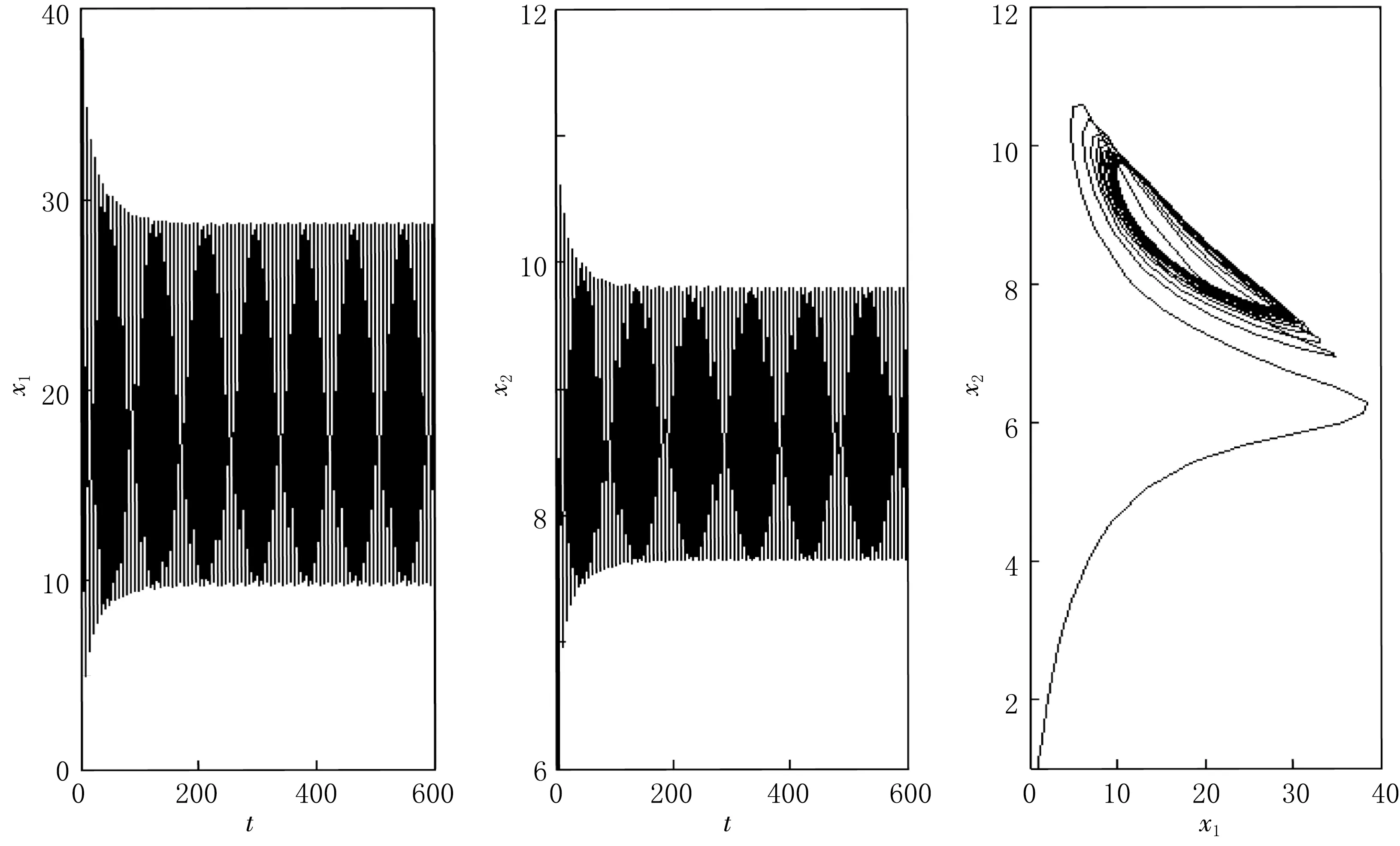
图6 当τ1=2.1,τ2=3.2>τ*≈2.794 6时,系统(31)的波图和相图
5 结论
本文研究了一类具有收获项的双时滞May合作系统.研究结果表明:当种群x1中只存在成熟期时滞τ2时,时滞变化对系统稳定性没有影响;当种群x1中只存在孕育期时滞τ1,或者当种群x1的两个时滞都存在时,种群的时滞变化对其生长具有很大影响.从图2、图4与图6中可以看出适当的延迟可以促进系统稳定性,而从图1、图3与图5中可以看出当时滞通过其临界值时,会破坏系统的稳定性,模型就会经历Hopf分支,产生周期解,甚至导致生态系统的失控与混乱.本文的研究有助于理解自然界中的一类种群合作关系,为相关部门及管理者规范对此类生物资源的开采、利用行为提供理论参考.
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
计算机系统应用(2021年10期)2022-01-06
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
教育教学论坛(2019年27期)2019-07-30
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
上海师范大学学报·自然科学版(2018年3期)2018-05-14
上海师范大学学报·自然科学版(2018年3期)2018-05-14
现代经济信息(2016年8期)2016-12-26
现代企业文化·理论版(2016年19期)2016-12-21
