基于关节模块自由组装式7 自由度工业机器人
2022-04-06 08:34敖冰峰
科学技术创新 2022年8期
鲍 敏 鲍 婕 敖冰峰
(黑龙江职业学院,黑龙江 哈尔滨 150080)
1 7 自由度工业机器人研发背景
习近平总书记在两院院士大会上表示,机器人是“制造业皇冠顶端的明珠”。其研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志。随着中国制造2025和工业4.0 的推进,我国已成为世界上最大的工业机器人市场,2020 年,工业机器人人才缺口达到300 万,2025 年将达450 万。然而目前全国开设工业机器人专业的大学有300 多所,很多处于起步阶段,工业机器人教学仪器设备需求量巨大。但是,现有工业机器人实训设备成本较高,功能单一,灵活度不高,核心传动部件也无法满足高校教学需要。另外,随着技术日新月异和产品的多样化,简易的往复机已经不能满足形状各异和复杂工艺的要求。工业柔性机器人应用技术已经不可逆转地成为了自动化生产线中不可缺少的一个重要环节,仿生机器人研究也成为机器人学的热点之一,但是由于多年的进化,生物的各关节运动一般难以用机械结构完全实现。近期,国际知名机器人厂商纷纷发布七自由度工业机器人产品,这引发了我们的思考。七轴工业机器人从二十世纪七十年代末逐步发展至今,为工业自动化的推进起到了重要的作用。由于具备其独特的技术优势,因此其相关产品动向更值得我们深入研究。
2 7 自由度工业机器人特点
2.1 改善运动特性
机器人运动学中存在着三个问题,这三个问题极大地限制了机器人的运动。
2.1.1 奇怪的配置。当机器人处于奇异位形时,其末端执行器不能沿某一方向运动或施加力矩,因此奇异位形对机器人的运动规划有很大的影响。
2.1.2 关节位移超限。在实际工作条件下,机器人各关节的角度范围是有限的,理想状态是正180 度或负180 度,但很多关节做不到。此外,7 自由度机器人可以避免角速度移动过快,使角速度分布更加均匀。
2.1.3 三是工作环境存在障碍。在工业环境中,在许多场合存在着各种各样的环境障碍。7 自由度机器人不仅可以改变末端机构的姿态,而且可以改变末端机构的位置。
2.2 改善动态特性
对于7 自由度机器人,利用其冗余自由度不仅可以通过轨迹规划获得良好的运动学特性,而且可以通过其结构获得良好的动力学性能。
7 自由度机器人可以重新分配关节力矩,这涉及到机器人的静平衡问题,即作用在末端的力可以通过算法来计算。对于传统的六轴机器人,各关节的受力是确定的,其分布可能不合理。而7 自由度机器人可以通过控制算法来调整各个关节的力矩,使薄弱环节的力矩尽可能小,从而使整个机器人的力矩分布更加均匀合理。
2.3 容错
当机器人发生故障时,如果一个关节发生故障,传统的6 自由度机器人将无法继续工作,而7 自由度机器人则可以通过重新调整故障关节的速度(运动容错)和重新分配故障关节的扭矩(动态容错)来继续工作。
3 基于关节模块自由组装式7 自由度工业机器人功能
3.1 不封盖RV 减速器,国内首创
7 轴工业机器人是最接近人类手臂结构的机器人,本工业机器人产品以7 自由度的高起点出发兼顾3 至7 自由度研发设计,既可以应用于智能工厂代替人工,也可应用于高校机器人教学。有以下6 大特色:(1)关节模块可实现3-7 轴的灵活拼装运行;(2)创新开发了核心传动部件-RV 减速器;(3)为适用不同场合,设计专利底座结构;(4)无线控制,平板电脑示教编程;(5)开发了虚拟仿真互动训练平台;(6)与同类产品相比,一机多能,性价比高。
可不封盖运行的工业机器人系列RV 减速器,能清晰看见内部机构,方便演示工作原理,且能应用于工业机器人关节轴中,用于组建多关节轴机器人,其内部至少三处镂空,可穿过导线、气管,不影响减速机正常运转,为工业机器人传动机构教学提供强力支撑,填补了此项产品国内空白,见图1。

图1 关节模块减速器拆解状态
3.2 自由组装式多轴机器人,面向不同应用
市面上的工业机器人产品结构都是固定自由度,功能单一,利用自研不封盖运行的RV 减速器、核心传动机构及机械结构,以关节为单元,可自由拼装成3 自由度、4 自由度、5自由度、6 自由度、7 自由度机器人。相比较市面上的单一功能的实训台,集成了工业机器人教学中几乎全部的实训操作项目,一台实现多台的功能,见图2。

图2 自由组装3-7 自由度工业机器人形态
3.3 产品采用专利底座设计,方便换装移动平台
现有的工业机器人安装底座通常是固化的,无法进行位置调整,无法适应各种安装情况,同时缺乏在减震和加固方面的安全性,工作发生碰撞时易倾倒造成设备损坏和人员危险。本机器人底座采用卡槽和门形销可拆卸结构专利设计,可安装在移动AGV 小车等多平台中使用,安装稳固、可快速切换,方便安装于不同平台。
3.4 创新平板电脑示教编程,无线连接、离线仿真编程
机器人除传统示教器外,创新开发了在平板电脑(或手机)上示教,既实现传统控制器的功能又可离线仿真编程,无线连接,摆脱线缆束缚,使用方便。
3.5 配套虚拟仿真互动训练系统,直观生动
配套开发了虚拟仿真互动训练系统,能够在仿真环境下学习机器人结构、组成原理,直观生动,为高校工业机器人机械结构教学提供支撑。
3.6 一机多能,高性价比
1 台设备即可实现多方面实训应用,既可实现多场合工业实际应用,又可完成本体认知、传动机构认知、示教编程、虚拟拆装、面向不同应用等5 方面以上实训教学应用,一机多能。量产价格仅为3 万元,相比市场上功能单一,价格动辄三五十万元的7 自由度工业机器实训设备,性价比优势明显。
4 基于关节模块自由组装式工业机器人技术参数
七轴机器人包括三个主要部件,机器人本体、控制柜、示教器,所有的编辑工作都在示教器上完成,当作业编辑完成后,点击下载按钮,将命令下载到控制柜中的主控板中,切换至运行模式,点击运行按钮开始执行下载命令。当遇到不可预知的运动状态时或危险时,按下急停按钮,机器人立即停止。
4.1 控制柜
硬件采用48v、24v、5v 电源供电,7 路步进电机驱动器,16 路继电器,wifi 模块,储存模块、控制按钮、主控板(stm32f103zet6)组成。
控制柜按钮布局,见图3。
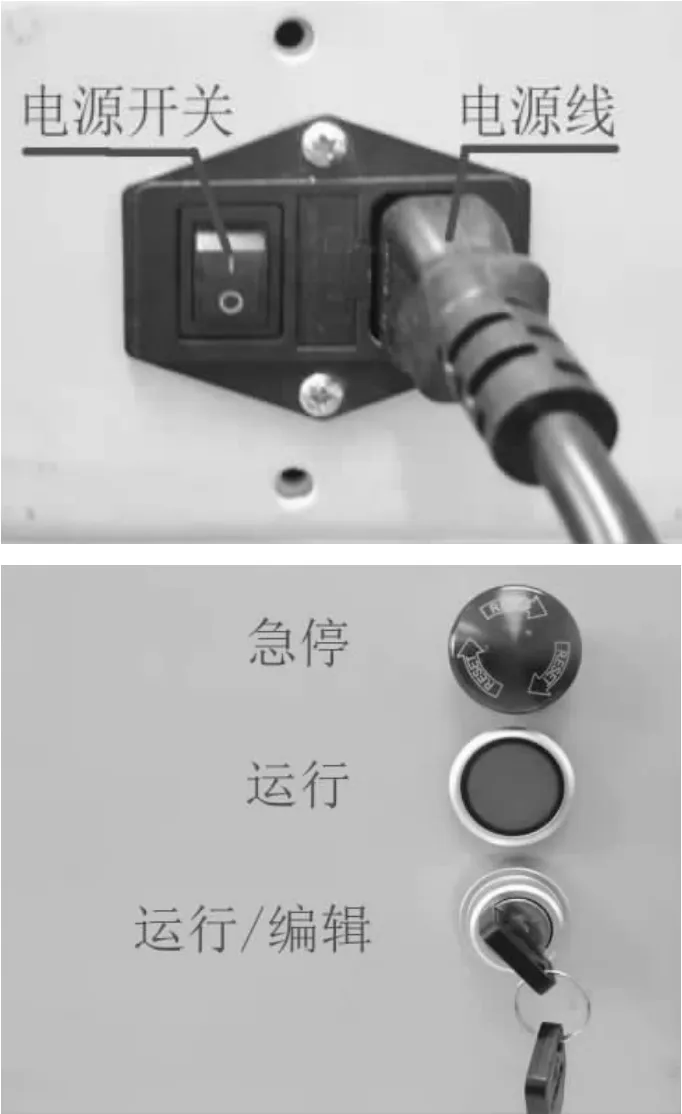
图3 控制柜按钮布局
4.2 示教器
软硬件配置:移动端,安卓5.0 以上版本,分辨率2560*1600,具备wifi 网络。pc 端,win7、win10 系统,具备wifi网络。
4.3 开机
连接电源线,确定复位按钮弹起,拨动电源开关,电源指示灯亮起,待工作指示灯间隔闪烁时,开机完成。
示教器软件安装:在安卓平板电脑或安卓手机上安装7自由度工业机器人示教器控制软件。pc 机上拷贝七7 自由度示教器软件到硬盘上。
示教器连接:当7 自由度工业机器人正常开机后,确保模块开关转动到编辑模式,查看wifi,选择HY-001 网络服务,输入密码“12345678”,网络连接成功后,启动示教器软件。当看到菜单头信息反馈栏中出现主控板的反馈信息时,示教器链接成功。
4.4 编辑模式
控制模式选择开关,拧动到编辑模式,急停开关弹起。
在编辑模式下,示教器可控制机器人姿态、编辑作业等操作。
4.5 示教器功能布局(图4)
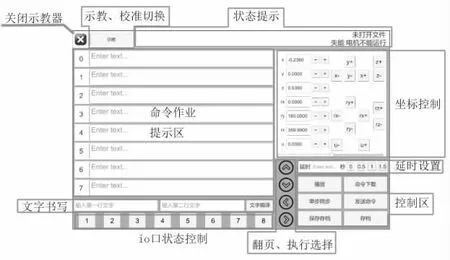
图4 示教器功能布局
使能:示教器最左测,黄底黑字,写着使能。当示教操作时,要用一根手指按着使能按钮,当机器人发生不正常的运动时,松开使能按钮,机器人立即停止。
关闭示教器:点击后关闭示教软件。
示教、校准切换:切换示教模式和校准模式。示教模式下,对机器人进行示教操作,记录、保存、命令下载等操作。校准模式下,对机器人进行原始状态校准,使机器人可以在示教模式下正确运行。
状态提示:提示机器人的当前姿态和状态信息。
命令作业提示区:记录和提示作业内容,点击作业可进行编辑。
文字书写:机器人写字功能的文字输入和编辑执行。
IO 口状态控制:控制机器人的外部IO 口的状态。示教器可控制8 个外部IO 端口状态。
坐标控制:控制机器人的姿态。最上面三组控制按钮,可控制末端执行器的位置坐标,点击对应轴控制按钮,可控制对应轴,沿着轴方向移动。中间三组控制按钮,控制末端执行器的角度,同样点击对应轴旋转控制按钮,可控制对应轴,沿着轴方向转动。最下面一组按钮,可控制机器人摆臂姿态。最下面的滑动条控制轴的调节速度,默认是中速,向右滑动加速,向左滑动减速。
延时设置:设置当前作业的延时等待时间,机器人在运行时,执行停止等待的时间,主要用途是,外部电路元件(例如:电磁换向阀)运行时需要时间来执行功能,延时功能就是配合外部电路元件的功能执行。
控制区:播放作业、执行示教命令、下载命令、存档的保存和读取。
4.6 校准功能布局(图5)
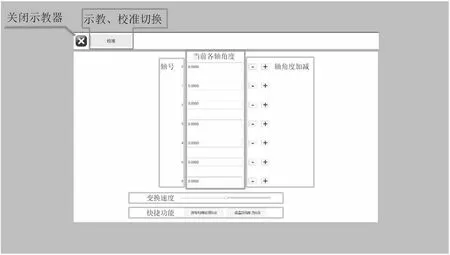
图5 校准功能布局
校准模式下,对机器人进行原点设置。
轴号:提示各轴编号。
当前轴角度:提示和手动设置机器人的轴角度。
轴角度加减:按钮方式设置机器人的轴角度。
变换速度:调整按钮角度设置的速度。
快捷功能:所轴转动回0 点,机器人各轴,转动回0 点。设置所有轴为0 点,设置机器人当前位置为0 点。
4.7 运行模式
运行模式选择开关,拧动到编辑模式,急停开关弹起。点击运行按钮,机器人将执行由示教器下载到控制柜中主控板的程序。
4.8 串口命令
通过串口命令,可控制七轴机器人的的所有功能,包括但不限于是示教器的指令控制,方便用户二次开发,功能扩展。
4.9 轴角度控制:用于调整机器人轴角度
“轴号”=“角度”,“轴号”=“角度”;
例如:0 号轴转动到10.5 度。 命令:0=10.5;
当需要多个角度联动时,需要多个角度命令组合发送,多条命令用“,”隔开;
例如:1 号轴转动到11.3 度,3 号轴转动到-10 度。命令:1=11.3,3=-10;
4.10 IO 控制
用于控制外部IO 口状态,开和关,此命令可以和轴角控制命令一同使用,串口命令,最多可控制16 个IO 口状态。
“IO 编号”=“设置状态”,“IO 编号”=“设置状态”;
例如:p1IO 端口状态设置为开;
命令:p1=1;
4.11 轴角度设置:修改当前轴角度
set:“轴号”=“角度”,“轴号”=“角度”;
例如:设置0,1 轴角度为0;
命令:set:0=0,1=0;
4.12 停止、急停:stop
4.13 急停复位:stop_over
4.14 暂停:pause
4.15 播放、继续:play
4.16 存储命令:main:“多行或单行命令”;
命 令 :main:0=10,1=10,p1=1;0=-10,1=-10,p1=0
4.17 读取存档数据:get_all
4.18 清空存档:clear
4.19 设置主控板wifi 设备名和密码
例如:设置wifi 设备名“HY-001”,密码“12345678”
命令:ssid:ap_ssid=HY-001,ap_pw=12345678
7 自由度工业机器人是对人手臂的真实还原,随着工业机器人产业的逐渐成熟,近年来,跨国机器人巨头们纷纷推出7 轴工业机器人,这种协作机器人是工业机器人的一类,是能够与人在生产线上协同作战,充分发挥本体效率及人类智能的新型机器人。成为了工业机器人高端新市场和众多企业的突破目标,也被视为高端工业机器人的标志。
猜你喜欢
中学生天地(A版)(2022年10期)2022-11-23
作文小学高年级(2022年3期)2022-04-20
娃娃乐园·综合智能(2022年3期)2022-04-19
网络安全和信息化(2019年1期)2019-12-22
福建中学数学(2018年1期)2018-11-29
军营文化天地(2018年2期)2018-04-20
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
少年文艺·我爱写作文(2017年6期)2017-06-12
商业评论(2014年9期)2015-02-28