
改进嵌套稀疏圆阵下基于OGSBL的DOA估计方法
2022-04-07 12:45史鑫磊张贞凯
电光与控制 2022年4期
史鑫磊, 张贞凯
(江苏科技大学,江苏 镇江 212000)
0 引言
DOA(Direction Of Arrival)估计是阵列信号处理研究的一个重要问题,近几十年发展迅速,在通信、雷达、声呐、军事、天文等多个领域获得了广泛的应用且效果良好[1-3]。有关DOA估计的研究大致可以分成两类:阵列结构优化,即稀疏阵列,是近年来提出的一种新型阵列流型,其中包括了互质阵列[4-5]、嵌套阵列[6]和最小冗余阵列[7],与传统的均匀阵列相比,稀疏阵列有着更高的自由度,可估计的信源数大于实际的阵元数[8];测向算法优化,是针对稀疏阵列的虚拟化算法[9-11],也是近年来DOA估计中的一个研究热点。
伴随着压缩感知技术的崛起,学者们提出了许多性能较好的稀疏信号重构算法,其中最经典的是L1范数方法[12],但由于其极高的计算复杂度,该算法的实用性不强。随后提出的稀疏贝叶斯学习(Sparse Bayesian Learning,SBL)方法[13],在降低算法复杂度的同时拥有与L1范数方法相近的性能。
传统的DOA估计方法都是假设远场信号的波达角落在事先定义好的离散角度网格上,如果网格间距过大会导致算法的性能显著下降,网格间距过小则会导致算法复杂度增加,针对这一问题,有学者提出了离格稀疏贝叶斯学习(Off-Grid Sparse Bayesian Learning,OGSBL)方法[14],有效解决了网格划分问题,从而提高了算法的角度估计性能。
目前,一些基于UCA的DOA估计算法已经发展得比较成熟,如基于波束空间的UCA-RB-MUSIC算法[15],基于波束空间的二维秩损算法[16],基于大规模UCA的互相关算法[17],以及基于UCA的ESPRIT算法[18]等。这些算法在理想情况下能取得较好的效果,但实际中往往存在许多非理想因素[19],比如阵元数有限、阵元间距小引起互耦效应、噪声误差等,导致这些理想模型下的算法得不到高精度的角度估计性能,而且无法实现欠定的DOA估计。
近年来,有学者将稀疏的思想引入到圆阵中。BASI-KOLO等在2016年提出了一种嵌套稀疏圆阵(Nested Sparse Circular Array,NSCA)结构[20],在2019年又提出了一种超嵌套稀疏圆阵(Super Nested Sparse Circular Array,S-NSCA)结构[21]。目前,针对嵌套稀疏圆阵DOA估计的研究还处于起步阶段,文献[22]提出了一种稀疏信号恢复算法,文献[23]在此基础上提出了一种基于矩阵填充的稀疏信号恢复算法以提高精度。然而,目前的算法主要还是建立在L1-SVD 的基础上,求解这种凸优化问题时会引起极高的复杂度,且存在超参数的快速取值问题[24-25]。
针对以上问题,本文采用离格稀疏贝叶斯学习方法实现了改进嵌套稀疏圆阵下的欠定DOA估计,与现有方法相比,所提方法提升了阵列稀疏性,降低了计算复杂度,模型超参数可自适应调整,且能获得较好的角度估计性能。
1 改进嵌套稀疏圆阵
考虑一个如图1所示的嵌套线阵。
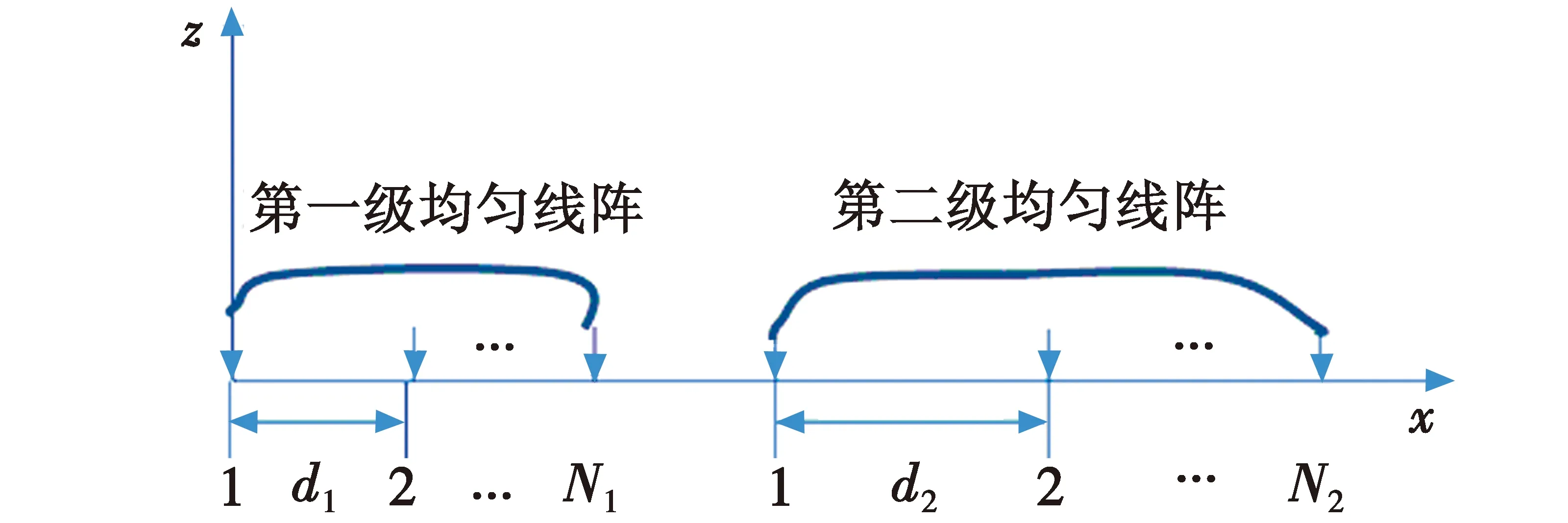
图1 嵌套线阵Fig.1 Nested linear array
图1中,两个子阵的阵元数分别为N1,N2,总阵元数N=N1+N2,阵元间距分别为d1=d,d2=(N1+1)d,令d=λ,λ表示波长,并将其首尾相接成一个圆,圆的半径为R,以增强稀疏性,降低阵元间的互耦效应,如图2所示。
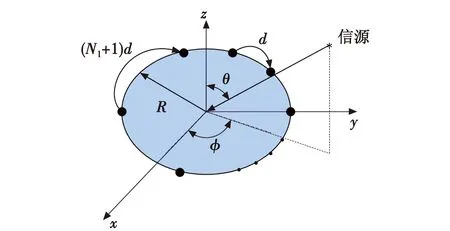
图2 改进嵌套稀疏圆阵Fig.2 The improved nested sparse circular array
阵元位置用d归一化后的实际阵元位置矢量为
(1)
假设空间中有K个窄带信源从远场辐射到改进嵌套稀疏圆阵上,第k(k=1,2,…,K)个信源的角度为(θk,φk)。假设俯仰角θk固定为90°,则该阵列的导向矢量a(φk)可以表示为
(2)
x(t)=As(t)+n(t)
(3)
式中:A=[a(φ1)…a(φk)],为该阵列的方向矩阵;n(t)为阵列接收到的噪声。接收信号x(t)的协方差矩阵为
Rxx=E[x(t)xH(t)]
(4)
将该协方差矩阵向量化可以得到
(5)

(6)

图3展示了N1=N2=3,Nv=23的改进嵌套稀疏圆阵的虚拟阵列阵元位置。
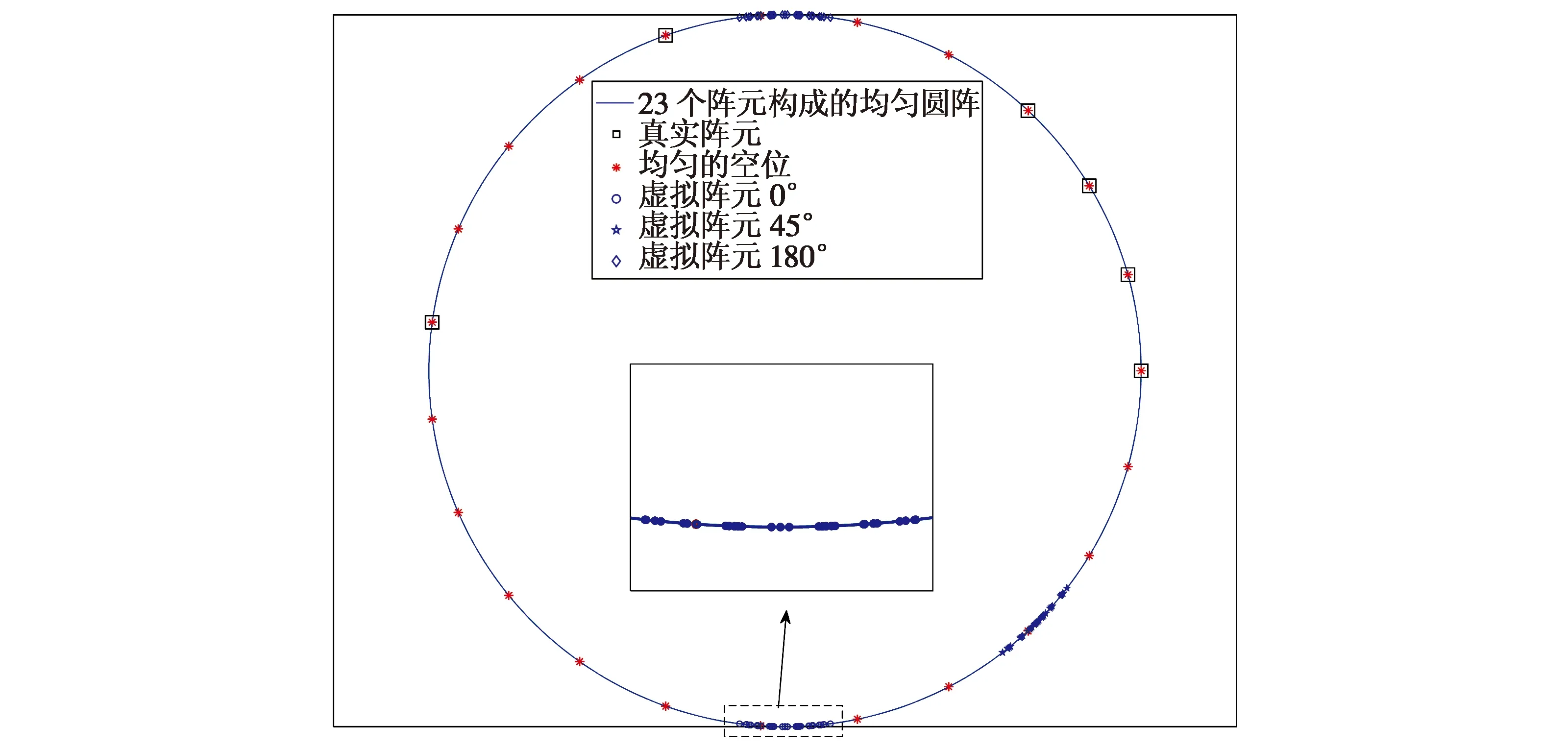
图3 改进嵌套稀疏圆阵虚拟阵元位置Fig.3 The position of virtual array elements of theimproved nested sparse circular array
由图3可知,改进嵌套稀疏圆阵虚拟阵列阵元数与传统均匀圆阵相比大大增加,有更多自由度,且注意到,改进嵌套稀疏圆阵的虚拟阵元位置随空间入射信号方向变化,但其自由度始终远大于6,因此,在多信源情况下对改进嵌套稀疏圆阵运用相关测向方法能获得更好的角度估计性能,且能估计的信源数也更多。
2 基于离格的DOA估计模型
为了有效解决网格划分问题,将式(5)改写为
Z=ΦS+E
(7)


(8)

(9)

(10)

3 离格稀疏贝叶斯学习方法
噪声模型为
(11)
式中,α0=σ-2,代表噪声精度。均值为μ、协方差为Σ的(圆对称)复高斯分布随机变量u的概率密度函数为

(12)
式中,(·)H表示共轭转置,由此可得
(13)
假设噪声精度α0=σ-2未知,有一个超先验是高斯分布的共轭先验
p(α0;c,d)=Γ(α0|c,d)
(14)


离网格距离模型:假设β的一个统一先验为
(15)
通过结合分层贝叶斯模型的阶段,联合概率密度函数是
p(S,Z,α0,α,β)=
p(Z|S,α0,β)p(S|α)p(α)p(α0)p(β)。
(16)
很容易看出S的后验分布是复杂的高斯分布
p(S|Z,α0,α,β)=CN(S|μ,Σ)
(17)
μ=α0ΣAv(β)Hz
(18)
Σ=(α0Av(β)HAv(β)+Λ-1)-1
(19)
计算Σ和μ需要知道超参数α,α0,β的估计值,它们可以通过最大化概率密度函数p(α0,α,β|Z)来估计。由于p(Z)与超参数统计独立,因此,最大化p(α0,α,β|Z)等价于最大化概率密度函数p(Z,α0,α,β)=p(α0,α,β|Z)p(Z)。有一种期望最大化算法可以将该问题转化为最大化E{lnp(S,Z,α0,α,β)}问题,它将S当成隐藏变量,E{·}代表S的后验期望。由此可以更新α,α0,即

(20)
(21)


(22)
式中:tr表示矩阵的迹;C是独立于β的常数;P是一个正半定矩阵,即
(23)

(24)
式中:Re{·}表示取实部;⊕代表哈达玛乘积。由此可得
(25)
容易知道,β和s(t)是联合稀疏的,它的非零项对应于K个信源的位置,只计算β的项中对应于α中K个最大项的位置,并将其他的设为零。然后β,P,v可以被截短为K维或K×K维。

(26)

(27)
最后通过寻找α谱峰位置来得到DOA估计,假设K个峰值的网格索引为ζk,k=1,…,K,则信源方位角估计值为
(28)
将上述所提嵌套稀疏圆阵欠定DOA估计的基于虚拟化的离格稀疏贝叶斯学习方法实现步骤总结如下:

2) 根据式(6)和式(8)构造扩展的过完备字典Φ,根据式(10)构造观测矩阵Av(β);
3) 根据式(20)和式(27)更新α和β;
5) 对α进行谱峰搜索,根据式(28)得到信源方位角估计值。
4 仿真分析
为验证算法的有效性、描述算法的角度估计性能,通过1000次的蒙特卡罗仿真来评估改进嵌套稀疏圆阵下基于虚拟化的离格稀疏贝叶斯学习算法的角度估计性能。定义均方根误差(Root Mean Square Error,RMSE)为
(29)

假定空间有K个信源;N1,N2分别表示子阵1和子阵2的阵元数,d1=λ,d2=(N1+1)d1,分别表示子阵1和子阵2的阵元间距,J表示快拍数,最大迭代次数设置为2000,噪声容限设置为τ=10-4,ρ=0.01。
1) 仿真1,算法有效性验证。
考虑有K=7个不相关窄带信号入射至N1=N2=3的改进嵌套稀疏圆阵中,信号的俯仰角固定为90°,方位角在10°~130°之间均匀分布,J=100,SNR为0 dB,图4展示了所提算法的空间谱,由图4可知,本文算法能有效且精确地估计信源角度。
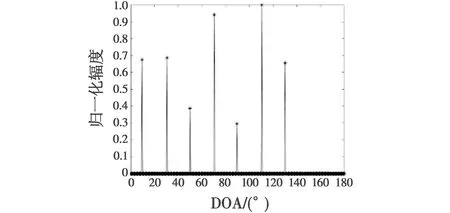
图4 本文算法估计结果
2) 仿真2,不同快拍数下算法性能比较。
考虑有K=3个不相关窄带信号入射至N1=N2=3的改进嵌套稀疏圆阵中,信号的俯仰角固定为90°,方位角在10°~50°之间均匀分布。图5展示了本文算法的性能随快拍数变化的趋势。由图5可得,参数估计误差随信噪比的增加呈下降趋势,快拍数越大意味着协方差矩阵越精确,因此算法性能随着快拍数的增加而提升。
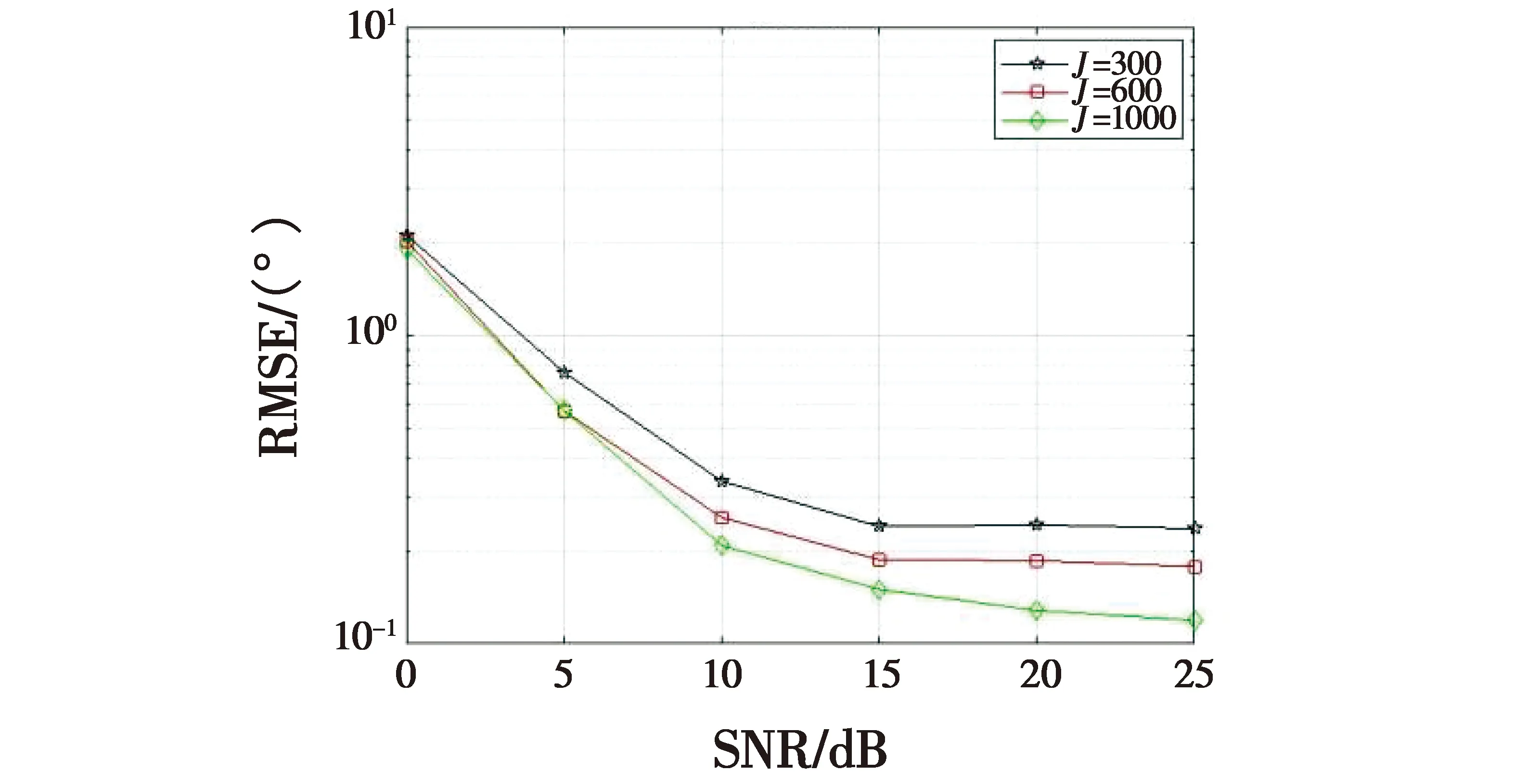
图5 所提算法性能随快拍数变化的趋势Fig.5 Performance of the proposed algorithm changing with the number of snapshots
3) 仿真3,不同信源数下算法性能比较。
考虑有K个不相关窄带信号入射至N1=N2=3的改进嵌套稀疏圆阵中,信号的俯仰角固定为90°,当K=2时,信号的方位角为(10°,30°);当K=3时,信号的方位角为(10°,30°,50°);当K=5时,信号的方位角为(10°,30°,50°,70°,110°)。J=200,图6展示了本文算法的性能随信源数变化的趋势,由图6可知,信源数的增多会导致算法性能的降低。

图6 本文算法性能随信源数变化的趋势Fig.6 Performance of the proposed algorithm changing with the number of sources
4) 仿真4,与传统均匀圆阵相比的角度估计性能。
考虑有K=3个不相关窄带信号分别入射至N1=N2=3,d1=λ,d2=(N1+1)d1的改进嵌套稀疏圆阵和阵元数N=6,d=λ/2的均匀圆阵中,信号的俯仰角固定为90°,方位角在10°~50°之间均匀分布,J=200。
由图7可知,在低信噪比、小快拍数、多信源情况下,本文算法的角度估计性能优于均匀圆阵下的MUSIC算法和OGSBL算法。

图7 与传统均匀圆阵相比的角度估计性能Fig.7 Angle estimation performance compared with traditional uniform circular array
5) 仿真5,与文献[20]中L1-based方法相比的角度估计性能。
考虑有K=3个不相关窄带信号分别入射至N1=N2=3,d1=λ,d2=(N1+1)d1的改进嵌套稀疏圆阵和N1=N2=3,d1=λ/2,d2=(N1+1)d1的嵌套稀疏圆阵中,信号的俯仰角固定为90°,方位角在10°~50°之间均匀分布。从图8可以得知,在低信噪比、小快拍数情况下,改进嵌套稀疏圆阵下,本文算法的角度估计性能优于文献[20]中l1-based方法。

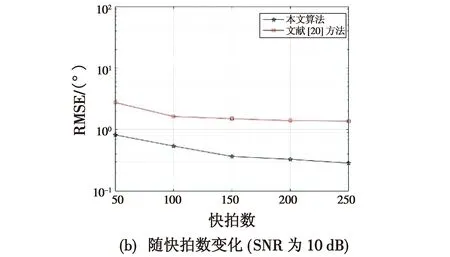
图8 与原嵌套稀疏圆阵相比的角度估计性能Fig.8 Angle estimation performance compared with the original nested sparse circular array
6) 仿真6,算法运行时间随快拍数变化曲线。
考虑有K=3个不相关窄带信号分别入射至N1=N2=3,d1=λ,d2=(N1+1)d1的改进嵌套稀疏圆阵和N1=N2=3,d1=λ/2,d2=(N1+1)d1的嵌套稀疏圆阵中,信号的俯仰角固定为90°,方位角在10°~50°之间均匀分布,SNR为15 dB。由图9可知,本文算法在相同快拍数下比现有算法具有更低的复杂度,随着快拍数的增加,本文算法的角度估计性能提升,算法迭代次数减少,因此算法运行时间随快拍数变化曲线呈下降趋势。

图9 算法运行时间随快拍数变化曲线Fig.9 Running time of the algorithm vs thenumber of snapshots
7) 仿真7,算法运行时间随信噪比变化曲线。
考虑有K=3个不相关窄带信号分别入射至N1=N2=3,d1=λ,d2=(N1+1)d1的改进嵌套稀疏圆阵和N1=N2=3,d1=λ/2,d2=(N1+1)d1的嵌套稀疏圆阵中,信号的俯仰角固定为90°,方位角在10°~50°之间均匀分布,J=300。
由图10可知,本文算法在相同的信噪比下比现有算法具有更低的复杂度,随着信噪比的增加,本文算法的角度估计性能提升,算法能够更快收敛,运行时间随信噪比增加而缩短。

图10 算法运行时间随信噪比变化曲线
5 结论
针对现有基于嵌套稀疏圆阵DOA估计方法计算复杂度高,超参数无法快速选取问题,本文提出了一种基于改进嵌套稀疏圆阵的离格稀疏贝叶斯学习(OGSBL)方法。该方法给出了改进嵌套稀疏圆阵模型,增强了稀疏性,并且结合离格模型与稀疏贝叶斯学习方法实现欠定的DOA估计,有效提高了原嵌套稀疏圆阵的测向性能。仿真实验结果表明,本文算法降低了计算复杂度,模型超参数可自适应调整,且在低信噪比、小快拍数和多信源情况下的均方根误差性能优于原嵌套稀疏圆阵和传统均匀圆阵的测向算法。
猜你喜欢
结构工程师(2022年2期)2022-07-15
无线电工程(2022年4期)2022-04-21
科学与生活(2021年17期)2021-11-10
空军工程大学学报(2021年4期)2021-09-23
空间科学学报(2020年4期)2020-04-22
全球传媒学刊(2019年3期)2019-10-19
火力与指挥控制(2019年1期)2019-06-15
现代计算机(2018年19期)2018-08-01
电影文学(2017年24期)2017-11-16
金融经济(2017年7期)2017-07-15
