
基于改进fal函数的无人直升机姿态自抗扰研究
2022-04-07 12:49华桑暾邱亚峰
电光与控制 2022年4期
华桑暾, 邱亚峰, 陈 成
(南京理工大学机械工程学院,南京 210000)
0 引言
无人直升机具有体积小、灵活性高等特点,在军事、农业等方面应用广泛,但无论在哪个领域,都要求其具有超高的可控性、稳定性,姿态控制作为飞行控制的关键一环,直接影响着无人直升机性能的好坏,为了提高无人直升机的可控品质,需要研究一种抗干扰能力强的控制方法。
目前常见的姿态控制方法有许多种。其中:PID控制对经常变化的环境需不停地调整增益[1],在直升机姿态控制方面,往往难以取得理想的效果;反步控制将复杂的系统分解为多个系统并分别设计Lyapunov函数,可以实现对非线性系统的控制[2],但随着系统阶数增加,控制的复杂性也迅速增加;模糊控制虽不依赖于精确模型,但其设计缺乏系统性,在复杂系统的控制上显得力不从心[3]。上述控制都或多或少存在缺点,自抗扰控制(ADRC)算法具有天然的解耦性,将系统的内扰与外扰进行实时估计并补偿,且不依赖于具体模型,对于直升机控制有着较好的控制能力。
文献[4]针对无人直升机系统航向通道扰动大等问题,将ADRC用于航向通道,验证了ADRC具有对扰动抑制能力强、控制精度高等优点;文献[5]严格证明了控制闭环系统的稳定性和收敛性,并通过数值仿真验证了自抗扰控制效果优于滑模控制。文献[6]推导了另一种控制函数fsun(),进一步升华了ADRC的理论深度。
本文首先建立了无人直升机的动力学模型,并提出一种基于改进fal函数的自抗扰控制方法,最后通过Simulink进行仿真,研究改进ADRC的性能,并验证了其对无人直升机姿态控制的良好性能。
1 无人直升机建模
1.1 动力学方程建立
直升机在飞行过程中,可以分解为空间平动和绕质心的定点转动。假设直升机为一刚体,并忽略弹性变形的影响,其动力学方程可由牛顿第二定律导出,向量形式为[7]
(1)
式中:F为外力;m为直升机的质量;M为外力矩;v为直升机质心的运动速度;H为动量矩。
将v和H按机体坐标系分解,可得到三轴的线运动方程为
(2)
式中:Fx,Fy,Fz为外力在Ox,Oy,Oz轴上的投影之和;u,v,w分别为3个轴的线速度;p,q,r分别为3个轴的角速度;φ,θ,ψ分别表示横滚角、俯仰角、偏航角。角运动方程为
(3)
式中:Mx,My,Mz为外力矩在Ox,Oy,Oz轴上的投影之和;Ixx,Iyy,Izz为直升机对Ox,Oy,Oz轴的转动惯量;Ixz为直升机对Ox和Oz轴的惯性积,绕机体轴正方向转动的力矩为正。
机体角速度和欧拉角角速度之间的关系为
(4)
综上,得到直升机的非线性动力学方程为
(5)
1.2 全面运动小扰动方程
对无人直升机的全量运动方程进行线性化处理,在平衡点处按泰勒级数展开,建立起直升机的小扰动线性化全面运动方程[8]为

(6)
式中,状态变量为
ΔX=[ΔφΔθΔψΔuΔvΔwΔpΔqΔr]
(7)
控制变量为
U=[ΔδcΔδaΔδeΔδr]
(8)
式中,δc,δa,δe,δr分别为直升机的总距操纵量,横向、纵向周期变距以及尾桨桨距。将参数代入矩阵A,B,即可得到无人直升机线性化模型。
2 fal函数的改进
非线性函数是非线性误差反馈律的重要组成部分,传统的非线性函数主要为fal函数,具有一定的滤波效果,其描述如下
(9)
图1所示为fal函数和改进fal函数的小误差响应。图1(a)为当线性区间δ=0.2,α分别取0.01,0.05,0.1,0.25,0.5,1时的fal函数图像。图2为α=0.25时,δ分别取0.01,0.05,0.1,0.25,0.5,1时的fal函数图像。可以看到:α的取值决定了fal函数的线性程度,α越小,非线性程度越强;δ决定了函数的线性区间,δ越大,线性区间越大。

图2 α=0.25,δ响应曲线Fig.2 δ response curve when α=0.25
从图1(a)可以发现,|e|=δ时函数虽然连续,但是并不光滑,导数的突变可能会导致系统性能变差;从式(9)看,当|e|>1时,若α取值较大,则最后的系统增益仍可能很大,不符合自抗扰控制“大误差,小增益”的要求[9]。因此,针对以上问题,并根据fal函数遵循的原则,提出改进fal函数原则:1)在原点处连续且平滑; 2)在|e|=δ处可导、连续;3)在误差较大时保持小的系统增益。
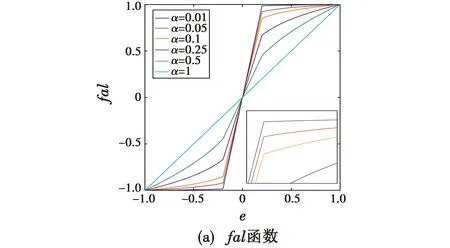

图1 fal函数和改进fal函数小误差响应曲线Fig.1 Small error response curves of fal-function and the improved fal-function
综上,设计的改进fal函数描述如下。
当|e|≤δ时,fal函数改写为
fal′(e,α,δ,λ)=k1sine+k2e2+k3e3
(10)
式中,k1,k2,k3为函数增益。
当δ<|e|<1时,fal函数保持不变,即
fal′(e,α,δ,λ)=|e|αsgn(e)。
(11)
当|e|>1时,引入限制量λ,
fal′(e,α,δ,λ)=|e|α/λsgn(e)。
(12)
为保证在|e|=δ处可导且连续,需满足函数值与导数均相同,即
(13)
求解得到
(14)
综上所述,fal函数可写为
(15)
图1(b)为改进fal函数在δ=0.2,λ=1时,α分别取0.01,0.05,0.1,0.25,0.5时的图像。可以看到,在|e|≤δ时,改进fal函数仍具有快速收敛的特性,在δ<|e|≤1时,工作在非线性区间,与传统fal函数相比,改进fal函数在|e|=δ处连续且可导,在|e|>1时,如图3所示,改进fal函数限制系统增益能力更强,更符合自抗扰控制“小误差,大增益;大误差,小增益”的要求。

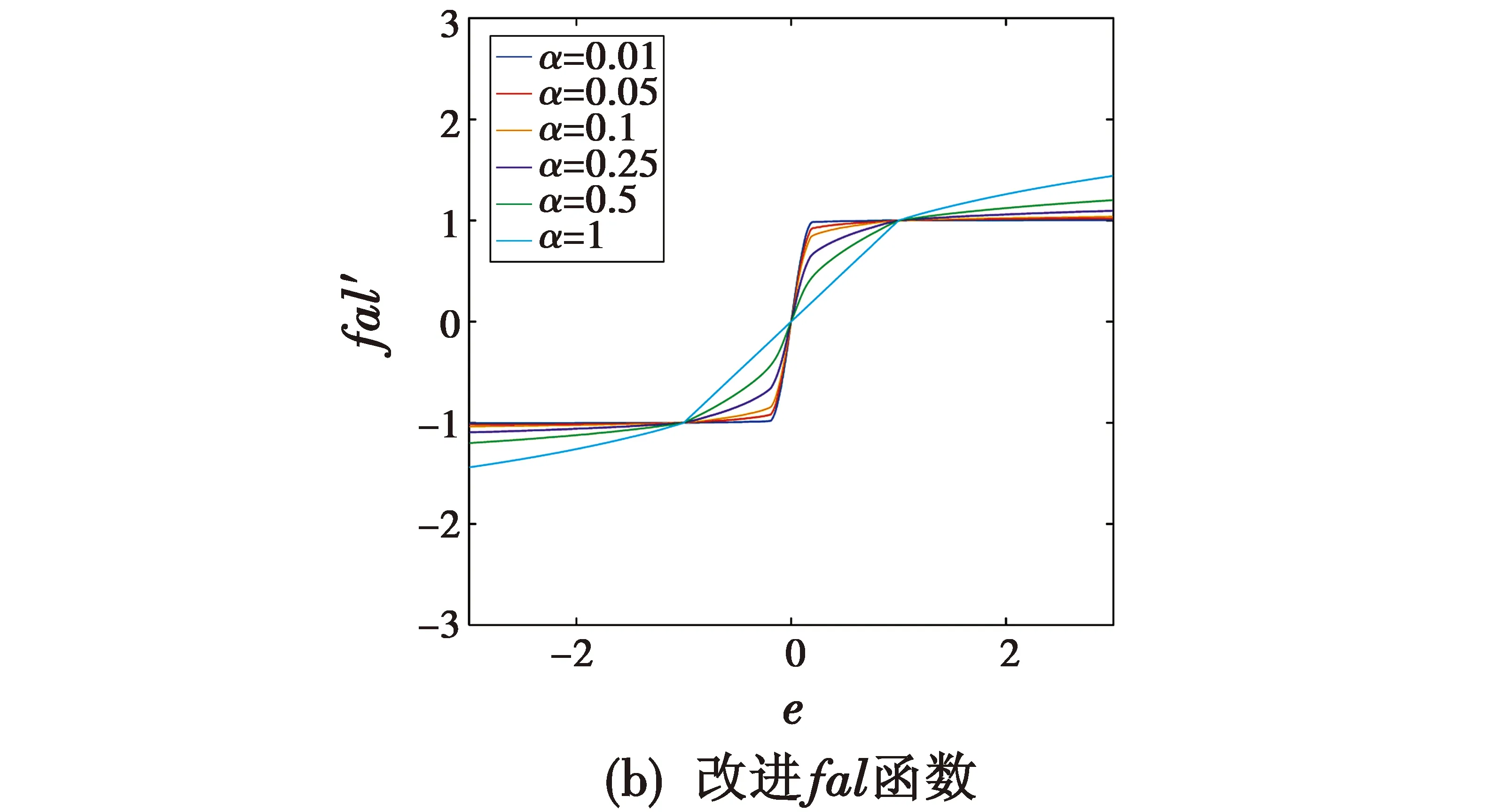
图3 fal函数和改进fal函数大误差响应曲线Fig.3 Large error response curves of fal-function and the improved fal-function
图4为α=0.25,δ=0.1时的函数误差增益曲线,可以看到,传统fal函数增益在|e|≤δ时在线性区间,因此函数增益不变,该特点虽解决了函数增益不会突增的问题,但也将函数增益限制在了一个较小的区间。对于改进fal函数,当误差极小时
(16)
结合图4可以看到,改进fal函数在|e|≤δ时,函数增益更大,也没有出现突增,增益控制效果将会更优。

图4 误差增益曲线Fig.4 Error gain curve
3 基于改进ADRC的姿态控制系统设计
直升机作为一个多输入-多输出(MIMO)系统,具有非线性、强耦合性等特点,其控制问题较其他方面更难,而自抗扰控制具有天然的解耦性,非常适合于直升机的控制。
对于一个多输入-多输出系统
(17)

(18)
x=[x1x2…xm]T,f=[f1f2…fm]T,u=[u1u2…um]T,令U=Bu,则系统变成

(19)
进一步地
(20)

自抗扰控制器包括3个部分:跟踪微分器(TD)、扩张状态观测器(ESO)、非线性状态误差反馈控制律(NLSEF)[10],图5为其控制器结构图。

图5 二阶自抗扰控制器结构图Fig.5 Structure diagram of second-order active disturbance rejection controller
3.1 跟踪微分器
跟踪微分器是为了减少因突变引起的系统大幅度超调,它能够对信号起到一个缓冲作用,实现对信号的快速跟踪,跟踪微分器的离散形式如下
(21)
式中:h为采样周期;v(k)为第k时刻的输入信号;r为决定跟踪快慢的参数,其取值依据系统的承受能力而定;fhan(·)函数为最速控制综合函数,描述如下
(22)
(23)

上述微分器可以快速实现对输入信号v及其微分信号的快速跟踪。
3.2 扩张状态观测器
ESO将内扰和外扰结合在一起成为一个新扰动,在原系统状态的基础上扩张出一个新状态,原系统变为线性系统[9],通过之前改写的fal函数,新的非线性扩张观测器表示为
(24)
式中:β0i>0(i=1,2,3);α1,α2为可调参数,常取α1=0.5,α2=0.25。
3.3 非线性状态误差反馈控制律
通过得到的误差信号及其微分信号,将这两个信号进行适当的组合,其中,非线性误差反馈控制律采用以下方式
(25)
扰动补偿形成控制量
u=u0-z3/b0
(26)
式中:v1,v2为跟踪微分器输出;z1,z2,z3为ESO输出;β1,β2分别为比例增益和微分增益;α1,α2常取值为0<α1<1<α2;δ为改进fal函数的近似线性区间;b0为补偿因子。
4 仿真与结果分析
为了验证改进ADRC的控制效果,在Matlab/Simu-link中建立无人直升机的数学模型,并与传统ADRC和PID控制进行比较,无人直升机的参数如表1所示,改进的ADRC参数如表2所示。为保证实验的严谨性,传统ADRC控制参数与改进ADRC参数设置相同。

表1 某无人直升机参数Table 1 Parameters of an unmanned helicopter

表2 改进ADRC参数Table 2 Improved ADRC parameters
设计3组仿真实验,第1组是在无干扰的情况下横滚角、俯仰角、偏航角的跟踪实验。设定姿态角变化幅值为10°、频率为0.1 Hz的方波为跟踪目标,姿态角初始值为0°,仿真结果如图6所示。

图6 方波信号跟踪仿真
第2组是在白噪声干扰下抗干扰的实验,直升机在飞行过程中易受到外界干扰,以横滚角为例,在对横滚通道估计前加入均值为0、方差为3的高斯白噪声来模拟直升机飞行中受到的总外扰,仿真结果如图7所示。

图7 白噪声干扰下横滚角抗干扰仿真Fig.7 Anti-jamming simulation of roll angle under interference of white noise
第3组是模拟直升机在飞行过程中受阵风影响,角度突变,以横滚角为例,在对横滚通道估计前加入幅值为6°的阶跃干扰,仿真结果如图8所示。

图8 阶跃干扰下横滚角抗干扰仿真Fig.8 Anti-jamming simulation of roll angle understep interference
在跟踪性能实验仿真中,传统ADRC和改进的ADRC跟踪效果远好于PID控制,改进ADRC依旧具有良好的跟踪快速性以及低超调性。
通过白噪声干扰下的抗干扰实验仿真可以明显看到,改进ADRC横滚角波动范围小于传统ADRC,因为改进fal函数在接近0时收敛性更强,因此缩短了调节的时间。在阶跃干扰下的抗干扰实验仿真中,可以看到改进ADRC在大误差下保持系统稳定的能力更强,能更快地使系统回到稳态。该仿真验证了采用改进fal函数的ADRC控制比采用传统fal函数的ADRC控制具有更强的抗干扰性。
5 结论
本文首先建立无人直升机的动力学模型,并针对fal函数拐点处不平滑、误差过大时增益较大等问题,提出了改进fal函数。将改进fal函数应用于自抗扰控制,重新设计了ADRC的非线性误差反馈律。通过Matlab/Simulink仿真得到改进ADRC在无人直升机姿态控制方面的快速性、超调量依旧效果良好,而抗干扰性能优于传统ADRC。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年10期)2017-04-20
电子制作(2016年1期)2016-11-07
北京航空航天大学学报(2016年3期)2016-02-27
北京航空航天大学学报(2016年3期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
