
新型海生物捕捞机器人系统设计
2022-05-12 01:26张继威于复生隽志龙魏井波范银辉
制造业自动化 2022年4期
张继威,于复生,隽志龙,魏井波,范银辉
(山东建筑大学 机电工程学院,济南 250101)
0 引言
目前在国内海参、海胆等海生物的捕捞工作依旧主要由人力来完成,这种捕捞方式不仅会随着气温的降低而增加人工下潜的困难程度,且长期从事此项工作则会对捕捞者自身健康造成影响。近年来研究人员水下机器人进行了广泛研究,故在海生物捕捞领域产生了一些海生物捕捞机器人,但对其研究主要基于吸取式与手爪抓取式来进行开展[1~5],这两种捕捞方式只能实现单个海生物顺次捕捞,导致其捕捞效率低下。因此,在此基础上设计了一种新型海生物捕捞机器人,该装置采用履带轮、螺旋桨混合驱动,通过拔取式爪手进行捕捞工作,此种捕捞方式单次动作即可实现小范围内海生物一次性捕捞,该装置的设计不仅为海生物捕捞机器人的设计提供了一种新的思路,且在较为平坦的海域及海洋牧场或是近海养殖区域应用将会提高海产品的捕捞效率。
1 机械结构设计
常见水下机器人形体结构主要有框架型、流线型两种[6],框架型水下机器人空间布置比较自由,对水下海生物捕捞与收集来说最为适用。
海生物捕捞机器人的机械结构部分主要由履带轮组件、车架底盘、驱动马达、浮力材料、浮力控制装置、摄像装置、电子密封舱、收集筐组件、水下电动推杆、车体框架及拔取组件组成,各部件连接关系如图1所示。

图1 海生物捕捞机器人结构示意图
整体设计的工作原理为:当装置开始工作时,通过推进器配合浮力控制装置使水下机器人下潜至待工作区域,通过上位机软件观察海生物的位置,控制履带轮移动至捕捞区域,此时控制竖置电动推杆使收集筐降至地面,收集筐组件前盖固接在车体框架上表面,故此时筐体与前盖错开空间,舵机配合电动推杆动作使拔取爪手完成海生物归拢及抓取工作,同时收集筐组件采用柔性蒙皮框底,可以通过海生物的自重使框底呈凹陷状,有效防止海生物因海流等因素掉至筐外。
1.1 推进系统
传统水下机器人的推进系统通常由多螺旋桨推进器构成,通过控制核心合理分配推力从而实现水下推进。而对于本设计来说,工作环境主要为养殖区域、海洋牧场或是近海领域,故采用两组驱动马达带动履带轮实现水下推进,履带轮不仅可以用于海底越障行走,而且还可以配合浮力材料有效实现整体配重,此外通过螺旋桨推进器配合浮力控制装置可以有效实现水下机器人的上浮及下潜动作,浮力控制装置结构如图2所示,螺旋桨推进器采用双平行正反桨方式布置,其布置方式及推进时本体受力情况如图3所示。
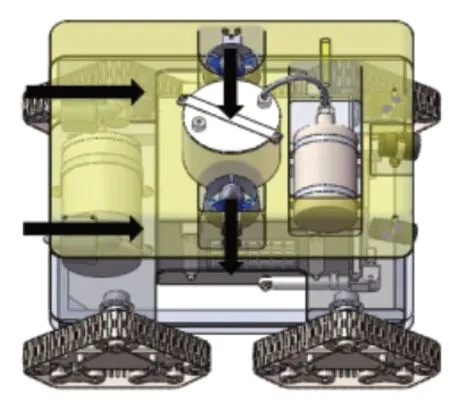
图2 推进系统布置图

图3 浮力控制装置结构图
当装置开始下潜时,打开气阀,适当释放气室中的气体,同时打开水阀使海水进入气室,配合螺旋桨推进器使机器人下潜,当装置沉到水底时,再打开气阀适当释放气室中的气体,使机器人减小浮力,从而增加其稳定性,在机器人捕捞完成上浮时,打开电磁三通阀,而后打开水阀,使高压气体充满气室,增大浮力,从而配合螺旋桨推进器实现上浮动作。
1.2 关键部件校核
电子密封舱是装载水下机器人控制系统和电子元器件的重要部件,其强度和稳定性必须满足要求[7,8],当耐压壳体发生屈曲失稳时,其主应远小于屈服应力[9],故应重点校核其稳定性。而对于本设计来说,基于圆柱形耐压壳因其良好的承载能力、结构强度及高的空间利用率等特点[10,11],选用圆柱形电子密封舱,其整体结构如图4所示。因电子密封舱两端采用圆形端盖及法兰密封,法兰的设置增强了端盖的稳定性,故重点通过理论计算及有限元分析校核其舱体稳定性。
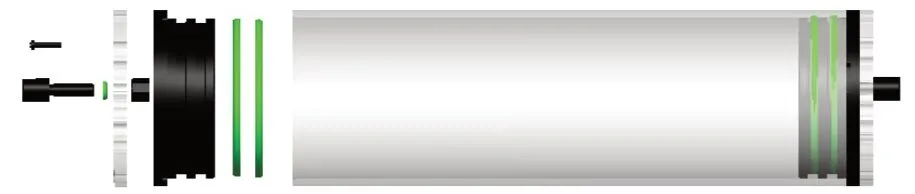
图4 电子密封舱结构图
耐压壳体的壁厚和壳体长度决定了抗失稳能力的大小[12],考虑到密封舱空间及端盖处采用螺栓固定等问题,初步设计舱体壁厚δ为5mm,外径D为160mm,长度L为300mm。受外力的圆柱型壳体可分为长圆筒与短圆筒[13],通过代入判别公式求得Lcr为1059mm,由此可知该舱体为短圆筒。

对于短圆筒来说,需考虑边界条件对临界压力的影响[14],现有的简化公式的计算结果虽然可以满足工程要求,但都是基于钢材的泊松比进行简化的,对于本设计来说材料选用为有机玻璃,其泊松比为0.38,弹性模量为3000MPa,波形n取3,采用Mises公式进行计算。
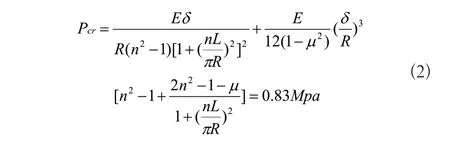
该装置最大设计深度为50 m,故工作压力P取0.5MPa,根据英国劳氏规范取安全系数为2.5,则0.83/0.5≈1.66<2.5,故不符合安全要求,则取舱体壁厚为6mm,求得临界压力Pcr=1.39MPa,则1.39/0.5≈2.78>2.5,故符合安全要求。
进一步通过有限元软件分析舱体的稳定性。将有机玻璃材料属性添加至材料库,网格大小设置为2mm,网格单元选择六面体solid186单元,通过扫略方式进行网格划分,考虑到舱体两端通过螺栓与端盖进行固定,则边界条件设置为两端简支约束,即除一端留有轴向位移外其他自由度均约束,对舱体外表面施加0.5Mpa压力,进行特征值屈曲分析求得一阶模态变形云图如图5所示。

图5 舱体特征值屈曲分析
由图5可以看出,失稳时最大位移发生在舱体中部,且出现褶皱,波形为3个,符合短圆筒侧向失稳特征,最大位移值仍在材料的延伸极限内,其临界压力为2.937×0.5=1.46Mpa,与理论计算值较为接近。
非线性屈曲分析较线性屈曲分析考虑了边界条件、初始缺陷以及材料非线性等因素,结果更具有工程意义[15],故引用特征值屈曲分析一阶模态作为结构缺陷,取缺陷因子为0.1,进行非线性屈曲分析,为减小计算量,且保证仿真结果的精确性,步长设置为10,子步设置为200,仿真结果如图6所示。

图6 非线性屈曲分析变形曲线
当压力达到了1.41MPa时出现拐点,即此处发生失稳,故其临界压力为1.41MPa,此结果更接近于理论计算结果。综上分析,通过有限元分析结果与理论计算结果相对比,证明了有限元分析的可靠性,且通过结果可以看出舱体稳定性满足要求。
2 控制系统结构设计
水下机器人的核心是其控制系统,需要具有通信、传感器信息采集及运动控制等功能[16~18]。本设计控制系统分为水上控制部分及水下控制部分,其中水上控制部分由上位机、遥控手柄、电量检测模块、蓄电池、上电力载波模块及图像显示卡组成,水下控制部分由主MCU、电源模块、下电力载波模块、传感器模块、照明观测模块、驱动模块及执行模块组成。其总体结构如图7所示,其主控制程序流程如图8所示。
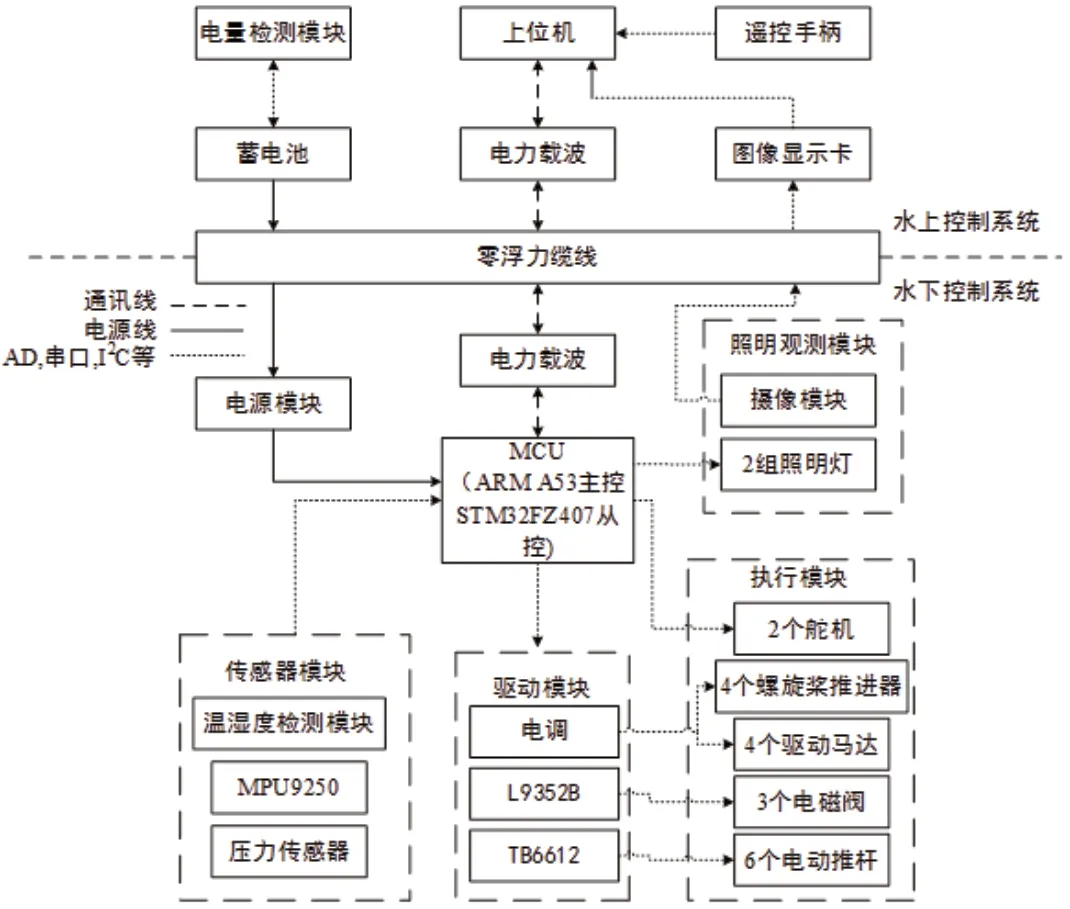
图7 控制系统结构图

图8 主控制程序流程图
MCU采用ARM Cortex-A53主控STM32F407从控式嵌入式系统,其主要负责传感器的采集数据及滤波、机器人本体姿态控制、照明灯控制及上位机通讯等工作。其中STM32F407系列单片机内部封装有多个定时器,通过内部定时器输出PWM波经电调模块驱动舵机、螺旋桨推进器及驱动马达,经I/O口驱动芯片TB6612、L9352B实现电动推杆及电磁阀的控制。
蓄电池通过电量检测模块实时检测运行状态,经零浮力线缆接电源模块实现水下供电。
传感器模块主要负责水下实时状态信息采集。其中MPU9250传感器内部集成了三轴陀螺仪、三轴加速度传感器及三轴磁力计,具有良好的动态响应特性;压力传感器选用MS5837,其提供高精度24位压力和温度数学传输,且防水性能优异;温湿度传感器选用DHT11,其具有高的可靠性和稳定性。MPU9250传感器、压力传感器及湿度传感器经I2C总线及单总线实现数据传输。
3 结语
基于目前海生物捕捞领域存在的问题,以实用性及提高捕捞效率为出发点设计了一种新型履带式海生物捕捞机器人,对机械结构及其控制系统进行了阐述,通过对该装置的关键部件校核,确保了海生物捕捞机器人水下安全运行。
本设计提出了一种新型捕捞形式,且解决了海生物捕捞领域存在的难题,为海生物捕捞机器人的研究提供了一个新的研究平台,并为其发展提供了一定的参考作用。目前国内海生物捕捞机器人的研究仍处于初期阶段,下一步将在此基础上重点进行自主目标识别控制的应用,从而进一步提高其自动化程度。
猜你喜欢
临床骨科杂志(2022年3期)2022-11-24
新技术新工艺(2022年7期)2022-09-21
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
航天制造技术(2021年5期)2021-11-06
舰船科学技术(2021年12期)2021-03-29
上海航天(2020年3期)2020-07-01
宇航总体技术(2019年4期)2019-08-06
北京航空航天大学学报(2017年3期)2017-11-23
