
基于Fitts定律和模糊融合的远程介入手术系统透明度提升方法研究
2022-05-12 01:26戴贤萍崔国华
制造业自动化 2022年4期
戴贤萍,胡 陟,崔国华
(1.上海工程技术大学 电子电气工程学院,上海 201620;2.上海工程技术大学 机械与汽车工程学院,上海 201620)
0 引言
远程机器人手术能保护医生免受术中X射线辐射,预防呼吸道传染病,缓解偏远地区专家医生缺乏的问题,实现战地远程手术[1]。然而在远程控制中,数据的获取与处理、执行器响应以及通讯等时延会影响力触觉反馈效果。中国第一例远程胆囊切除手术,总延时高达253ms[2]。
时延的大小会影响到操作者的临场感和远程可操作性,而时延的不稳定性会造成控制对象的振动,导致远程操作无法进行。延时过大会延长医生手术操作时间,加大手术风险,给医生带来心理压力。当前血管介入机器人时延问题的研究主要在稳定性方面[3],时延对透明度的影响已被证实,被列为部分学者的下一步研究计划[4,5]。文献[6]提出了一种用于机器人辅助手术的新型波变补偿(WVC)双边遥操作结构,但是基于对于Internet通讯环境下的随机时延控制效果并不理想。文献[7]将时延对遥操作系统的影响看作系统抖动,使用时延在线预测结果对该扰动补偿,但传统的基于前期状态量进行外推的预测方法难以准确估算导管受力弯曲形变,影响建模控制效果。文献[8]验证了通过使用肌电(EMG)信号进行单个关节运动预测有助于提高医疗机器人在远程康复和远程手术中的可操作性和稳定性,但EMG信号只能反映神经肌肉的活动,不适用于导管位姿预测。
本文拟基于Fitts定律进行两自由度协同手术时间估算及医学经验数据进行离线的导管位姿多元信息模糊融合,实现位姿预测以缓解时延影响。基于医学经验数据的模糊控制,不需要精确模型,可以减小术中的计算量,符合手术机器人的实时性。机器人辅助手术的力反馈系统存在非线性,滑模控制对干扰和未建模动态具有很强的鲁棒性,适合柔性体的控制[9]。由于导管发生弯曲时的力触觉信息尤为重要,需要系统能够根据力触觉变化来实时调整控制器。自适应控制能修正自己的特性以适应对象和扰动的动态特性的变化。
1 基于虚拟现实的远程手术系统介绍
基于虚拟现实的的远程介入手术系统如图1所示。心血管介入手术的多为主从式机器人系统,分为放射室内(从手端)和放射室外(主手端)两部分,使用网络进行通信,放射室内的从手端机构操作导丝等介入器械,医生则在放射室外通过主手端控制从手端设备运动。

图1 基于虚拟现实的远程介入手术系统
基于虚拟现实的的远程介入手术系统延时包括数据获取和处理延时、通讯延时、力触觉渲染延时、执行器响应延时[1,10,11]。时延大小如表1所示。

表1 远程手术延时和本地手术延时
其中通讯延时[12]如图2所示。

图2 5G通讯流程图
以上四个因素造成的时间延迟由几十毫秒到几百毫秒不等,在人机交互中,对于不同的硬件配置和软件的限制,延迟是不可避免的[13]。在虚拟现实环境中,30毫秒的微小附加延迟,可能会导致图像不稳定并导致模拟器不适,使得用户感到恶心、头晕,严重降低了人机交互的质量[14]。
本实验中,基于虚拟现实的远程手术总延时为285ms,而本地无网络传输的总延时为160ms。因此,在基于虚拟现实的远程操作系统中,通过一定的技术手段进行预测,以降低时延造成的影响,具有一定的现实意义。
2 基于Fitts定律的典型手术任务时间估计
2.1 Fitts定理
Ware和Balakrishnan证明了Fitts定律适用于在虚拟现实环境中对简单的可及目标任务的运动行为建模。在实际应用中,基于Fitts定理定义基于虚拟现实技术的切割手术难度等级,从而根据难度等级预测手术完成时间[15]。
基于血管介入手术操作中典型操作任务,导管进行血管分岔口时推拉和旋捻行进宽度和操作距离,使用两自由度协同Fitts定律预测医生完成该操作需要的时间。

其中log2(A/W+c)为基本线性难度指数(index of difficult,ID),代表需要传递的信息。c为调节参数,可根据不同情景适当调,为0、0.5或1。a和b是两个经验参数,不同的情况会导致这两个参数不一致。由式(1)可知,难度系数(ID)与起始位置离目标物体的距离(A)呈正相关,与目标区域的大小(W)呈负相关。
具有分叉口血管任务的难度系数(ID)与推拉、旋转都呈正相关函数。因此,具有分叉口的血管路径的手术难度系数定义如下:

由“费茨定理”可知,操作者控制一个物体从起始点到达目标区域所用的时间由以下两个因素决定:起始位置离目标物体的距离(A);目标区域的大小(W)。
如图3所示,引入曲线横坐标作为积分变量:C为曲线路径,绕过该路径的难度系数定义为沿难度系数基本曲线的总和。
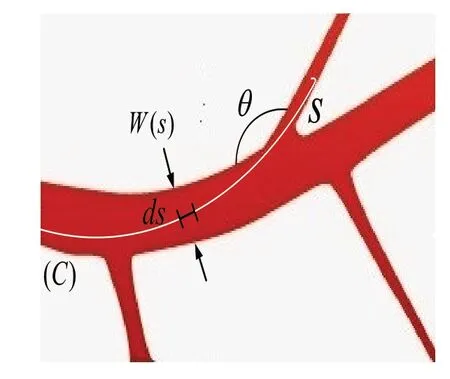
图3 沿曲线积分

对于具有分叉角度的血管路径,如图2,可以得知给定角度的路径宽度为:

由式(3)所示,对基本ID积分可得:

2.2 手术任务
本研究使用弹簧—质子模型,用于在模拟中对虚拟血管组织、虚拟导丝进行建模。模拟图形渲染和触觉渲染之间的关系,以在实验期间提供真实的视觉和触觉效果。模拟介入手术效果如图4所示。

图4 模拟介入手术图
用人体血管壁的力学模型参数,刚度系数b=3×103N/m,粘性系数为240N·s/m。正常人的主动脉内径为25mm,冠状动脉内径为3.2mm,支血管内径为2.3mm。针对不同的ID指数进行多次试验,难度系数与任务需求如表2所示。本试验分别取W=25,3,2,A=100,200,θ=90°,135°。A指的不同血管长度,W指的血管内径,θ指血管弯曲角度。导丝直径为0.8mm。

表2 难度系数与任务需求
8位具有手控器操作经验的研宄生分别通过Omega-7完成。记录从受试者拿起导丝在起始点到达终点的时间,结果如表3所示。线性拟合结果如图7所示,两个经验参数a、b分别为-0.89和3.5。

表3 移动时间与难度系数
将导丝沿主动脉经过冠状动脉进入分支血管的过程分成3个阶段,根据费茨定律将他们分别定义为不同难度系数的等级。如图5所示:一般难度系数越大的手术任务,完成时间越长。根据每个等级的完成时间,对具有时间延迟的远程介入手术做时间预测。操作者本身的熟练程度也会影响完成时间,但是本文主要研究的是不同手术阶段在虚拟现实设备的难度系数,因此人的因素不在考虑范围。

图5 移动时间与难度系数拟合结果
3 模糊融合
介入手术中外科医生通过推拉动作来实现导丝平移运动,使其在血管中前进;通过扭转工具来实现导丝的旋转运动,使其在血管分岔口通过旋捻进入正确的分支血管。导管的位姿信息包括直线位移信息以及旋转的角度信息,它可以有效地辅助医生进行推送和搓捻动作的判断。
导管位姿变化主要受血管形状变化和医生操作影响,因为分叉口血管特征十分复杂,不同患者具有不同的血管特征,使得介入手术中柔性导管的位姿具有多变性与复杂性,从而导致难以对导管进行位姿预测。
针对上述问题,本文提出一种基于模糊理论的多元信息融合方法[16]。基于大量医学经验数据,并对血管的多元信息进行有效的融合。将血管特征模糊化后对具有不同特征的血管进行分类,从而可以得到该类血管的位姿变化曲线并将分类后的数据保存在知识库中。面对具体病人时,可以针对该病人的CT,通过多个血管分岔口特征与知识库预测介入手术中导管的的位姿变化。
3.1 模糊控制器的设计
本文通过模糊推理模型,将血管分岔口的两大因素量化为模糊导管位姿状态,参照一定的规则融合为统一的导管位姿状态。
3.1.1 血管信息中输入输出描述
为得到典型血管分岔口处导管位姿变化,将分岔口血管长度(LE)、血管分岔口角度(AN)作为模糊控制器的输入。以导管位姿(PO)作为系统的唯一输出量。具体的隶属度函数选择如下:
1)LE隶属度函数选择
如图6所示:分岔口血管长度的论域为[8~12],单位为cm。将其分为4个等级,可表示为LE∈{LH(长度大),LM(长度偏大),LN(长度偏小),LL(长度小) }。

图6 “分岔口血管长度”模糊子集的隶属度函数
2)AE隶属度函数选择
如图7所示:血管分岔口角度的论域为[0-113],单位为度。将其分为4个等级,表示为AN∈{AH(角度大),AM(角度偏大),AN(角度偏小),AL(角度小)}。
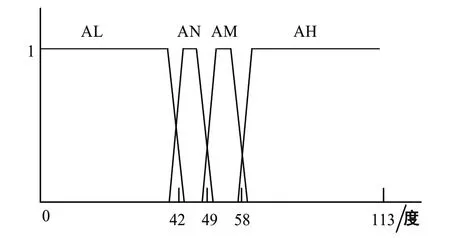
图7 “血管分岔口角度”模糊子集的隶属度函数
3)PO隶属度函数选择
输出语言变量是导管位姿的变化。由于不同情况导致的导管位姿变化不同,以上所提出来的位姿变化都假设为典型血管介入手术的导管位姿变化。
3.1.2 血管信息中模糊控制规则库
本文把输出变量设计成一个四维向量,规则库如表4 所示。
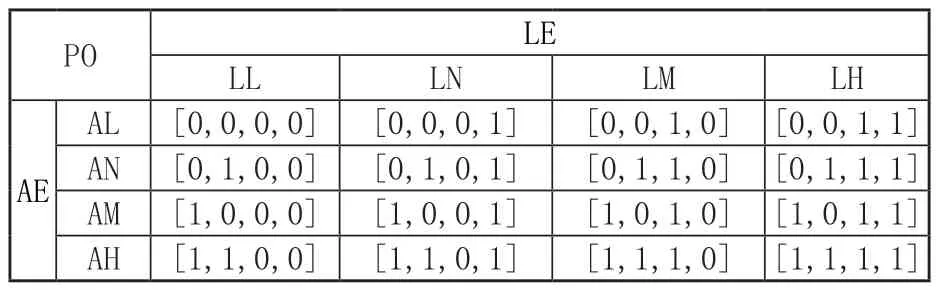
表4 模糊融合规则表
3.1.3 解模糊
采用重心法将输出的隶属函数曲线转化为适合于控制的清晰量。

其中,μN(xi)为加权系数。
根据大量的医学数据,经过量化、整定、模糊化、模糊推理和反模糊化处理后,由模糊融合规则表所得的分类结果如图8所示。

图8 位姿模糊融合结果
在分叉口血管介入手术中,导管的直线位移逐渐增大,角位移基本没有变化。分叉口血管长度越长,导管的直线位移越大;分叉口血管角度越大,导管角位移变化越大;当导管弹入正确的支血管时,医生感受到导管的力变化,将导管旋入支血管,此时角位移会产生较大的变化,直线位移增加。
在介入手术中,由实际手术病人CT中分岔口血管长度以及血管分岔口角度的所属范域,根据离线模糊数据库中已有的典型位姿变化数据,使用解模糊得到该病人位姿变化数据,将模糊融合数据根据权值融合在主从式血管介入机器人位姿预测系统中。
4 仿真与实验
4.1 导丝与血管碰撞力响应模拟
仿真设置血管长度为12cm,血管分岔口角度为90°。经模糊控制器处理后的位姿变化数据带入基于弹簧-质子的血管模型中,其中人体模型血管的刚度系数K为2×105N/m,粘性系数b=20N·s/m输出的模拟反馈力如图9所示。

图9 真实交互力与仿真数据对比
如图9所示,蓝线是使用文献[5]的交互装置测得的介入手术交互力,红线是将实测的交互力进行滤波,黄线是根据其人体血管数据模糊融合的仿真力。仿真数据和实验中的力有相同的变化趋势,表明基于Fitts定律和医学经验多元信息对导管位姿进行离线模糊融合可以有效地给主手端提供反馈力。将实测的交互力进行滤波与仿真力比较,最大误差为0.09N。
4.2 实验系统介绍
本文所实现的远程心血管介入手术系统中与主控计算机进行信息交互的硬件包括主手Omega.7和从手UR机器人。从手端二维力传感器JDLH测得的数据经过UR5控制箱后,通过UDP协议与主控计算机进行数据交互。从手UR机器人的控制器运行在Mini-ITXPC上,通过PC本地的TCP/IP端口与机器人控制器建立连接。通过引导接口UR Script,定时与机器人控制器交互位置信息。主手Omega.7配有SDK开发包,可以实现设备的初始化、位姿信息读取,使用USB2.0与主控计算机直接通信。

图10 交互力测量装置UR5和虚拟现实实验设备
根据从手末端关节的位姿,调用出主手端已有的模糊融合的位姿数据库,解模糊后的位姿数据对存在时延的从手端位姿进行修正。不同接触状态下,导管-血管碰撞受力不一致。导管进入血管分岔口时的力触觉信息是手术成功的关键,它能够帮助医生进行判断和操作。需要系统能够实时的进行力跟踪。
由于力触觉反馈设备装转置的传动钢丝绳具有柔性,力反馈系统存在不确定性和非线性。自适应滑模具有实时辨识的作用,使得系统的状态动态调整,逐渐逼近实际值。为了提高力反馈的精度,主手端介入手术力反馈控制使用自适应滑模控制。
4.3 自适应滑模控制器的设计
基于指数的离散趋近律为:

其中采样时间T很小,T<<1.0。
s(k)值递减的充分条件为

在滑模运动过程中,|s(k)|的值无限接近,一旦满足,系统就进入震荡状态。
因此,当k→∞时,滑模运动的稳态震荡幅度为:

由式(5)可知,s(k)递减就要求,即ε的值应该满足:

由式(4)及式(8)得到改进的离散趋近律为:

离散趋近律式(9)所对应的控制率为:

可见滑模趋近律式(9)满足离散滑动模态的存在性和到达性条件,所设计的控制系统是稳定的。
4.4 基于自适应滑模的力反馈控制
以下研究中分别使用PID控制算法和自适应滑模控制算法进行力反馈,滑模控制器参数取c=10,ε=15,q=30,控制效果如图11所示。

图11 自适应滑模控制和PID控制跟踪效果
由图11可以看出,系统的非线性使得PID控制难以在力变化的时候保持良好的跟踪状态,控制误差最大达8.1%。研究表明,在0.5~200N的范围内,人的“可察觉的差异”(JND)力触觉分辨力为7%[17],PID控制难以满足非线性系统的控制要求。图12显示了ε值在力跟踪时的自适应变化,在系统刚开始运动时ε值大一些,随着时间的增加,ε值逐步减小,对非线性具有很好的自适应性。图17中自适应滑模控制具有很好的鲁棒性,控制误差最大为3.2%。总能够保持最小的跟踪误差。

图12 ε值的自适应变化
5 结语
本文基于Fitts定律和医学经验多元信息进行导管位姿离线模糊融合,使得主手端同过位姿预测得到的计算力与从手端的测量力具有相同变化趋势,提高了系统的透明性。自适应滑模控制器使得系统误差最大为3.2%,达到远程手术要求。但本研究的导管位姿预测模型仍是最初级的,将来我们将专注于更准确的心血管手术导管预测模型。
猜你喜欢
大电机技术(2022年2期)2022-06-05
现代信息科技(2020年22期)2020-06-24
电子制作(2019年14期)2019-08-20
山东工业技术(2019年16期)2019-07-19
电子技术与软件工程(2019年6期)2019-04-26
科技与创新(2018年12期)2018-06-22
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年19期)2017-02-02
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
