
基于RANSAC算法的移动机器人路径监测方法
2022-05-12 01:26孙帅
制造业自动化 2022年4期
孙 帅
(青岛理工大学 信息与控制工程学院,青岛 266520)
0 引言
移动机器人自主导航是近年来移动机器人领域的重点研究方向,而路径监测与规划则是实现机器人导航的关键步骤。所谓移动机器人路径监测大体上可以理解为:在存在多个障碍物的运动环境中,机器人能够根据既定评价标准,找到一条由起始点指向目标点的平滑移动曲线。为保障机器人的运动安全性,要求其行进过程中不能存在任何形式的碰撞现象。RANSAC算法可以根据包含异常信息的样本数据集的存在形式,建立符合计算需求的数学模型,并可以将所得数值解按照一定标准排列起来,从而快速确定有效样本数据所处位置,常被应用于计算机视觉领域之中[1]。由于样本数据集合中存在明显的信息噪点,所以异常信息的存在形式并不唯一,既可以是错误的计算结果,也可以是错误的测量数据或是错误的假设条件。为加强对于混合数据的处理能力,RANSAC算法在提出假设的同时,也会给定一组正确的数据样本,以供网络主机在建立样本模型时可以直接选取与利用。近年来,随着机器人研究技术的不断深入,如何避免其运动角速度出现明显波动的情况,从而使机器人移动路径呈现出较为平滑的存在状态,已经成为了一项亟待解决的问题。基于上述研究背景,提出基于RANSAC算法的移动机器人路径监测方法。
1 机器人移动路径地图构建
机器人移动路径的地图模型决定了移动特征与迭代次数指标之间的映射对应关系。
1.1 移动特征提取
在使用RANSAC算法对机器人移动路径地图进行匹配处理之前,需要根据特征节点的实时排列形式,建立完整的路径曲线提取法则。在曲线节点所处位置不发生改变的情况下,移动特征参量之间的关联等级越强,就表示当前行进路径的表现形式越趋于平滑。设c表示机器人移动路径标记系数,cζ、ωc表示基于标记系数c的横向路径定标值与纵向路径定标值。联立上述物理量,可将机器人移动特征提取表达式定义为:

式(1)中,z1、z2表示两个随机选取的移动路径节点排列系数,且z1指标取值不等于z2指标,表示机器人移动路径节点的分布特征,ΔX表示平滑移动路径曲线中的路径节点个数值。
图1为机器人移动特征节点的提取与处理原则。
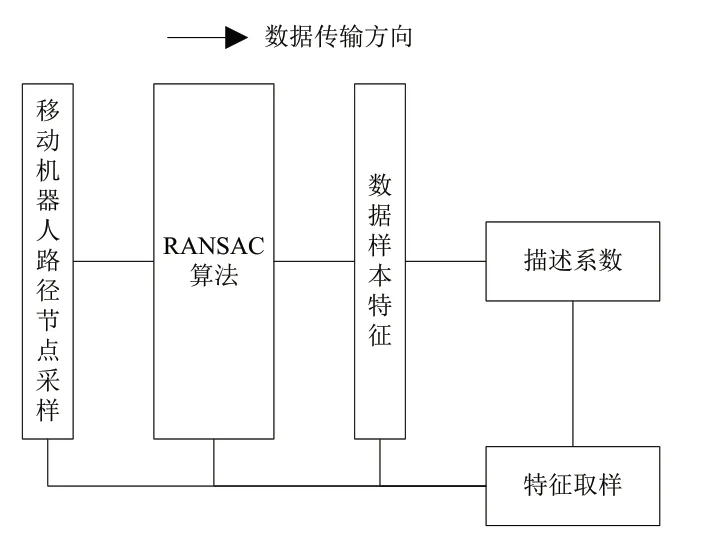
图1 机器人移动特征提取原理
由图1可知,在构建机器人移动路径地图时,节点数据的传输方向始终由左端指向右端。完成移动机器人路径节点采样处理后,监测主机可以在RANSAC算法的作用下,建立完整的数据样本特征集合,通常情况下,该集合空间的承载能力较强,能够准确定义关联节点之间的数值,映射关系。在描述系数指标取值保持不变的情况下,监测主机元件能够根据RANSAC算法的作用强度,完成对机器人移动路径节点特征的取样与处理。
1.2 RANSAC算法流程
RANSAC算法可以约束移动机器人路径节点在地图模型中的分布形式。若将移动特征提取参量视为既定变量条件,则可认为随着RANSAC算法作用能力的增强,路径轨迹节点的分布状态会更加趋向平滑曲线。在实际应用过程中,RANSAC算法以机器人移动路径节点特征抽样作为初始流程,假设路径节点样本求解结果不会发生改变,则可将机器人移动特征节点在地图模型中的映射坐标看作影响RANSAC算法作用能力的唯一物理条件[2]。
设O0(x0,y0)表示移动机器人路径节点的初始值坐标,On(xn,yn)表示移动机器人路径节点在地图模型中的映射坐标,n表示基于RANSAC算法的映射特征系数。联立上述物理量,可将基于RANSAC算法移动机器人路径节点映射表达式定义为:
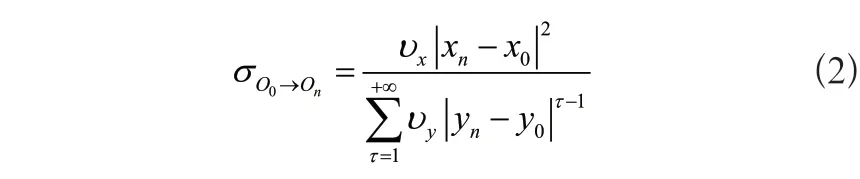
其中,vx表示横坐标映射向量,vy表示纵坐标映射向量,τ表示初始映射系数。
联立式(1)、式(2),可将RANSAC算法的作用表达式定义为:

式(3)中,V~表示基于RANSAC算法的机器人移动路径节点抽样特征值,ϖ映射抽样系数。
图2为RANSAC算法的实际作用流程。
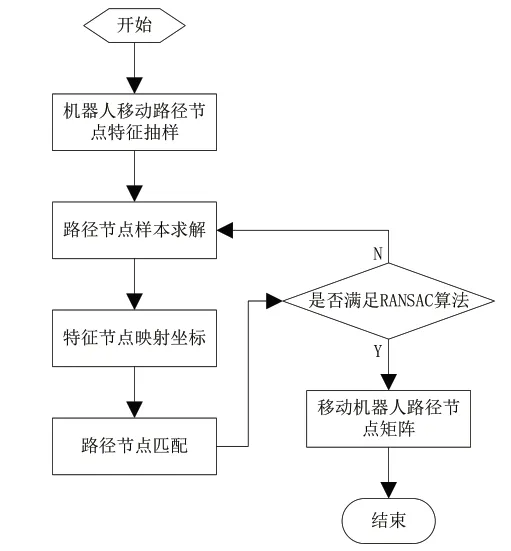
图2 RANSAC算法执行流程图
对于移动机器人路径节点而言,其在地图模型中的排列状态若不能完全满足RANSAC算法,监测主机就不能准确定义路径节点的矩阵表达式,此时主机元件也就不能实现对移动机器人路径节点曲线的准确监测。
1.3 迭代次数
RANSAC算法迭代次数能够根据移动机器人路径节点每次迭代后的内点比例,计算移动路径地图模型的数值配比关系,它反映出了之前迭代过程中RANSAC算法的实际作用能力[3]。式(4)是RANSAC算法迭代次数ϑ的计算方法。
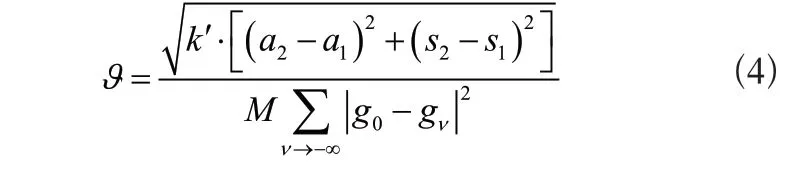
式(4)中,v表示移动机器人路径节点的迭代配比系数,gv表示与系数v相关的机器人路径节点标记特征值,g0表示机器人路径节点标记特征的初始值,a1、a2表示两个基于RANSAC算法的机器人路径节点映射系数,s1、s2表示两个基于RANSAC算法的机器人路径节点关联系数,且a1≠a2、s1≠s2的不等式条件同时成立,k`表示基于RANSAC算法的移动机器人路径节点迭代配比参量。监测主机元件可以根据迭代次数指标的数值计算结果,对RANSAC算法的作用强度进行调节。一般来说,迭代次数指标的计算数值越大,表明RANSAC算法的作用能力较强,此时监测主机对于移动机器人路径节点的规划能力也就相对较强;反之,若迭代次数指标的计算数值较小,则表示RANSAC算法的作用能力相对较弱,此时监测主机也就不能对移动机器人路径节点进行有效规划。
2 移动机器人路径监测
在RANSAC算法的作用下,按照启发式评估函数建立、动态监测机制完善、步长值定义的处理流程,实现移动机器人路径监测方法的设计与应用。
2.1 启发式评估函数
移动机器人的实际工作环境往往是复杂且多变的,故而直接提取路径节点并不能获得完整的全局信息,且为了保证监测指令的执行时效性,单次运算行为的计算量不宜过大。针对上述问题,根据RANSAC算法的理论基础,建立启发式评估函数[4]。所谓启发式评估函数是一种能够评估移动机器人路径节点分布完整性的处理思想,同时具有可更改与可调节的应用特性,在已知迭代次数指标计算数值的前提下,函数定义式所涉及的节点参量越多,整条路径轨迹的平滑性曲线特征也就越明显。设ε、δ表示两个不相等的路径节点启发系数,且ε>δ的不等式条件恒成立,lε表示基于系数ε的轨迹节点评估权重值,lδ表示基于系数δ的轨迹节点评估权重值,k表示度量指标,hk表示度量系数为k时的路径节点监测向量,表示路径节点监测向量均值,λ表示基于RANSAC算法的运算系数。在上述物理量的支持下,联立式(4),可将基于RANSAC算法的移动机器人路径启发式评估函数表达式为:

对于移动机器人而言,启发式评估函数对于路径轨迹的约束作用,包含从当前位姿到目标节点的全部运动过程。若当前位姿节点与目标节点之间的物理距离较大,建立启发式评估函数过程中所涉及到的数据运算行为也就越复杂;如若当前位姿节点与目标节点之间的物理距离较小,建立启发式评估函数过程中所涉及到的数据运算行为也就相对较为简单。
2.2 动态监测机制
在RANSAC算法作用下,完善动态监测机制既可以实现对移动机器人路径节点的按需调取,也能够验证启发式评估函数是否合乎实际应用需求。规定在机器人运动过程中,已经过节点与未经过节点的编码形式有所不同,且二者对于路径节点向量的定义形式也不完全相同。设 表示机器人已经过节点定义向量,表示未经过节点定义向量,且的不等式条件同时成立,φ表示基于RANSAC算法的移动机器人路径节点编码系数,j1表示与已经过节点定义向量相关的动态监测特征,j2表示与未经过节点定义向量相关的动态监测特征。在上述物理量的支持下,联立式(5),可将基于RANSAC算法的移动机器人路径动态监测机制表达式定义为:

为准确定义机器人移动步长值,动态监测机制计算表达式的取值必须严格遵循RANSAC算法。
2.3 步长值定义
步长值指标决定了机器人的运动行进能力。在一个完整的RANSAC算法执行周期内,步长值指标取值越大,就表示机器人的运动能力越强,此时需要监测的路径节点数量也就相对较多(为了缩小监测误差,在计算机器人移动路径节点个数值时,必须将首尾节点排除在外)[5]。设α、γ表示两个非零且不相等的机器人移动方向定义向量,iα表示基于α向量的运动转向系数,iγ表示基于γ向量的运动转向系数,f表示移动机器人运动路径的曲率系数,P表示路径曲线的平滑性特征值。在上述物理量的支持下,联立式(6),可将基于RANSAC算法的移动机器人步长值计算结果表示为:

根据步长值指标计算结果,核实动态监测机制法则的完善程度,在规范RANSAC算法作用能力的同时,实现对移动机器人路径节点的准确监测。
3 实例分析
选取FR-09的四转四驱移动机器人作为实验对象。首先,利用RANSAC算法执行程序对移动机器人的运动路径节点进行监测,将所得数据作为实验组变量;然后,将移动机器人再次摆放至初始运动位置处;其次,利用改进灰狼优化算法执行程序对移动机器人的运动路径节点进行监测,将所得数据作为对照组变量;最后,对比实验组、对照组变量指标,总结实验规律。
在机器人运动过程中,其行进角速度指标能够反映出移动路径曲线的平滑度水平。一般来说,机器人运动角速度越快,就表示移动路径曲线的平滑度水平越高;反之,若机器人运动角速度较慢,则表示移动路径曲线的平滑度水平也相对较低。
机器人运动角速度(ϖ)的计算表达式如下:

分析式(8)可知,机器人运动角速度(ϖ)受到x1指标(水平转向波动值)、x2指标(竖直转向波动值)的共同影响。且三者之间的影响关系为:x1指标取值越大、x2指标取值越大,机器人运动角速度也就越快,此时机器人的运动转向能力相对较强,整条运动曲线也就更加趋于平滑。
下表记录了实验组、对照组x1指标的实验数值及其与极限x1指标的数值对比情况。
分析表1可知,在整个实验过程中,x1指标理想极大值呈现出相对稳定的存在状态。实验组x1指标则保持连续增大的数值变化状态,全局极大值0.694m/s与理想极大值0.353m/s相比,增大了0.341m/s。在1min~3min的实验时间之内,对照组x1指标呈现出持续上升的数值变化状态;在3min~10min的实验时间之内,对照组x1指标则呈现出来回波动的数值变化状态;从极限值角度来看,对照组x1指标最大值0.396m/s与理想极大值0.353m/s相比,仅增大了0.043m/s,远低于实验数值水平,但其数值波动变化能力却高于实验组。
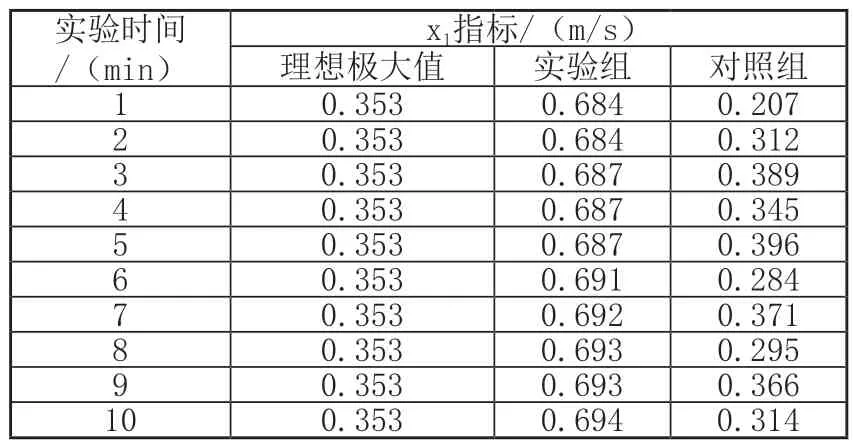
表1 水平转向波动值(x1)
表2记录了实验组、对照组X2指标的实验数值及其与极限X2指标的数值对比情况。
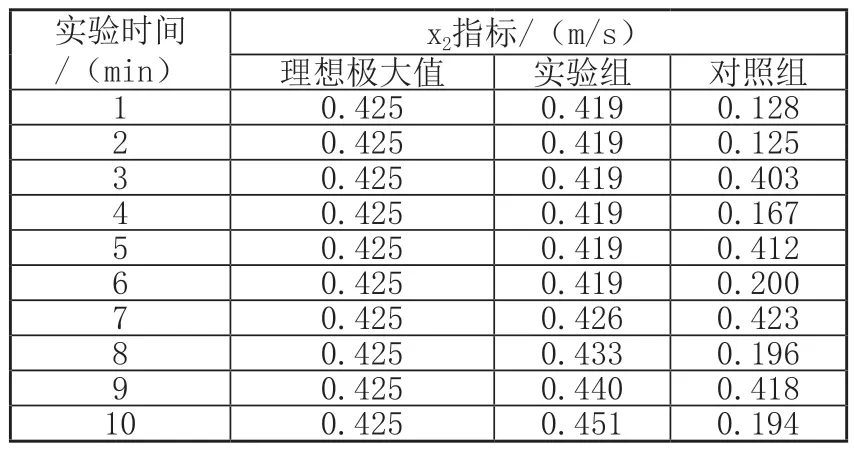
表2 竖直转向波动值(x2)
分析表2可知,在整个实验过程中,x2指标理想极大值也呈现出相对稳定的存在状态。在1min~6min的实验时间之内,实验组X2指标呈现出较为稳定的存在状态;在6min~10min的实验时间之内,实验组x2指标则表现出连续上升的数值变化状态,其极大值0.451m/s与理想极大值0.425m/s相比,增大了0.026m/s。对照组X2指标则始终表现出来回波动的数值变化状态,其全局最大值仅能达到0.423m/s,小于理想极大值,更小于实验组最大值。
综上可知,在RANSAC算法的作用下,水平转向波动值指标、竖直转向波动值指标的数值水平都出现了明显增大的变化趋势,符合促进机器人运动角速度的实际应用需求,能够使机器人移动路径呈现出平滑曲线的存在形式。
4 结语
与改进灰狼优化算法的监测模型相比,新型移动机器人路径监测方法以RANSAC算法为基础,提取移动路径内的节点特征,又根据启发式评估函数条件,建立步长值定义表达式。随着这种新型监测方法的应用,机器人运动角速度指标的数值水平得到了明显促进,在保证行进路径曲线的平滑性方面确实具有较强的实际应用可行性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
煤气与热力(2022年2期)2022-03-09
中学生数理化·高一版(2021年11期)2021-09-05
现代仪器与医疗(2021年1期)2021-06-09
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
电子技术与软件工程(2019年20期)2019-11-30
计算机测量与控制(2018年9期)2018-09-19
娃娃乐园·3-7岁综合智能(2017年9期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年8期)2018-02-01
