基于自适应EEMD 的风电机组联轴器松动故障诊断*
2022-05-21 03:10李国英王诗彬陈雪峰
振动、测试与诊断 2022年2期
李国英,王诗彬,陈雪峰
(1.西安石油大学经济管理学院 西安,710065)
(2.西安交通大学机械制造系统工程国家重点实验室 西安,710061)
引言
风电机组中常见的典型故障之一是连接齿轮箱和发电机的联轴器故障,因外界风场中的风速是频繁变化的,使得联轴器受到叶轮转动中传递的随机变载,非常容易发生联轴器松动、联轴器打滑甚至飞车等事故,给机组的安全、稳定运行带来很大影响。风电机组故障的并发性及其结构和周围环境的复杂性使得故障动态信号不但被强噪声污染,而且又相互调制和耦合,给故障识别带来难度。
Wu 等[1]提出了集成经验模式分解方法,通过在待分析的本征模式分量(intrinsic mode function,简称IMF)中依次加入一定量的高斯白噪声,得到一系列的IMF,将得到的IMF 进行集总平均,作为总体平均经验模式分解的本征模式分量,以达到抑制模式混叠的目的。国内外相关领域专家进一步研究了EEMD 及其相应的改进算法[2-5],并将相关算法成功应用于海洋科学、车辆动力学、经济学[6]、能源价格预测[7]及生物医学等各个领域,在信号处理[8-9]、故障诊断[10-19]领域更是得到了广泛应用和发展。
EEMD 在实际应用的过程中,加噪声方式及总体平均次数的取值[2]多数情况下都需经验确定。笔者针对EEMD 方法中噪声幅值大小和集合平均次数的确定缺乏有效理论指导的问题,提出了基于协同信噪比的自适应集成经验模式分解方法,以揭示噪声添加的定量机制,实现加入噪声大小及总体平均次数的自适应选取,提高EEMD 对微弱故障特征信号的检测能力。
1 EEMD 的基本算法流程
EEMD 抑制模式混 叠[20]的算法流程如图1 所示。根据算法流程,可以得到具体分解步骤如下。
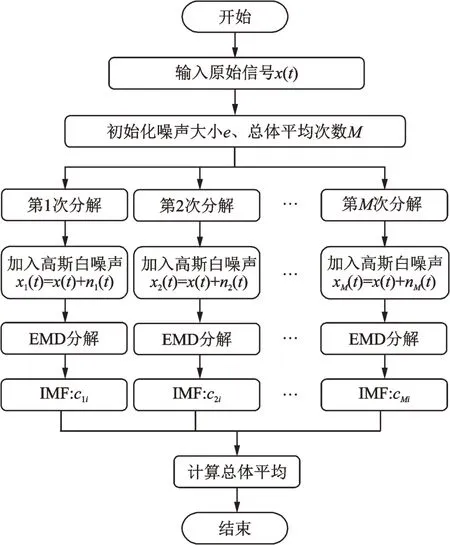
图1 EEMD 算法流程Fig.1 The flow chart of EEMD
1)假定原始采集到的振动信号为x(t),均值为零的白噪声为ni(t),其幅值标准差是一个常数值,则加噪后的信号表示为

其中:xi(t)为加入第i次噪声的信号。
2)将加噪信号xi(t)通过EMD 依次进行分解,得到每一个加噪信号xi(t)对应的一系列本征模式分量,记为cij(t),其含义为加入第i次噪声的信号通过EMD 分解得到的第j个基本模式分量,余项用ri(t)表示。
3)将第j个基本模式分量对应的加入第1 次到第N次噪声的信号cij(t)进行总体平均,计算得出最后的基本模式分量作为EEMD 的结果,即

其中:cj(t)为原始振动信号通过EEMD 后计算得出的第j个IMF。
EEMD 方法通过多次分解取平均值,减小了加入的高斯白噪声对目标信号基本模式分量分解结果的影响。
EEMD 应用过程中,需要确定最佳的总体平均次数,以便既能快速实现运算结果,又能保证得到准确的基本模式分量。在分解过程中若设置不当,会增大输入信号与EEMD 分解后IMFs 的相对误差,从而导致分解结果无意义。文献[21]研究得出,EEMD 方法的应用过程中,噪声幅值比值系数和总体平均次数存在一定的关系,即

其中:N为总体平均次数;α为比值系数,即加噪后幅值标准差和原始振动信号的幅值标准差之比;e为相对误差,即期望的原始振动信号和通过EEMD方法进行分解后得到的基本模式分量之和的预期相对误差。
文献[20]指出,在EEMD 方法中加入较小的白噪声时误差也会较小。不断地提高总体平均次数值,相对误差可以减小至可接受范围。由式(3)或式(4)可以看出,期望的信号分解相对误差e设定后,一旦得到比值系数α的值,即可求出总体平均次数N的准确值。
当α过大时,相对误差增大,会淹没原信号的故障特征,使整个分解过程变得没有意义;当α过小时,不足以引起原始信号局部极值点的变化,达不到改变信号极值点分布的目的,一般建议α取0.2[20]。原则上讲,N值越大分解误差越小,但N值的增大会降低计算效率。
2 自适应集成经验模式分解方法
针对EEMD 的重要参数多数情况下都需要人为经验来设定的问题,根据待处理信号的时频特性与EEMD 原理,提出了基于协同信噪比的自适应集成经验模式分解方法,以协同信噪比指标CSNR 为测度指标,当目标频率范围内的CSNR 达到最大值时,它所对应的调节参数为最优参数,从而实现了白噪声幅值标准差系数α的最优化自适应选取,进而求得总体平均次数N。
2.1 协同信噪比指标
测度指标会直接影响运算算法的有效性和准确性,针对不同的系统性能需求,需要使用不同的测度指标。协同信噪比指标[22]是在经典信噪比的基础上,将目标信号频谱中最高谱峰位置、互相关系数、残余噪声方差及过零点比率等成分引入构造而成。
协同信噪比指标CSNR 的计算公式为

其中:SNR 为信噪比;C为互相关系数;Nvar为残余信号方差;z为过零点比率;A为最高谱峰与次高谱峰的幅值之差。
|C|,|SNR|和Nvar全部归一化 处理使其取值范围变为(0,1]区间。这部分可以让检测结果更加逼近真实信号的频率值,再借助A可进一步凸显目标频率的谱峰。
2.2 自适应EEMD 算法流程
基于协同信噪比CSNR 指标的自适应集成经验模式分解方法的算法流程如图2 所示。算法流程的详细步骤如下。
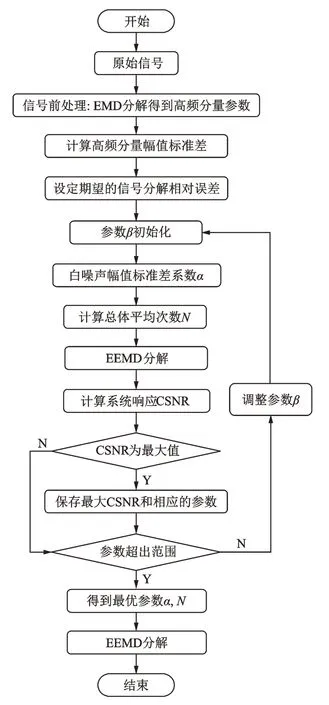
图2 基于CSNR 的自适应EEMD 算法流程Fig.2 The flow chart of the adaptive EEMD method based on the CSNR
1)信号前处理:首先用EMD 方法处理原始振动信号,并计算第1 个IMF 分量的幅值标准差,再计算这个高频分量的幅值标准差与原始信号幅值标准差的比值ε。
2)设定参数:设置期望的信号分解相对误差e,一般设置为0.5%的标准偏差。
3)参数初始化:引入调控参数β,调控参数β为噪声强度大小调节参数,是高频分量幅值标准差比值系数ε与噪声分量幅值标准差比值系数α的比值,即存在关系β=ε/α。一般设置调节参数β的初始值为1,步长为1,取值区间为[1,10]。
4)加入的白噪声幅值标准差比值系数α的自适应提取:用网格搜索算法,以CSNR 为目标函数,得到最优参数β。具体计算过程为:对噪声强度大小调节参数β的每一个值,用第1 个IMF 的幅值标准差比值系数ε除以β,得到对应的α,再利用式(3)计算总体平均次数N;用求得的每一组(α,N)进行EEMD 分解,得到一系列总体平均后的IMF。
针对每一组IMF,计算其协同信噪比CSNR,在参数β的搜索范围内寻找最大值,将最大的协同信噪比CSNR 值及其相应的最优β值进行存储;进而利用α=ε/β的关系计算得到最优的白噪声幅值标准差系数α。当噪声强度调节参数β超出搜索范围时,改变参数β,并转回第2 步,重新设定β的初始值及相应的搜索范围和搜索步长。
5)输出优化结果:用最优的噪声强度调节参数β得到最优参数(α,N),再次进行EEMD 分解,从而实现了目标信号特征频率的自适应提取和有效检测。
3 数值仿真与工程应用
3.1 数值仿真
首先构造一组仿真信号进行仿真实验进行验证。考虑到工程实际中旋转机械出现故障时的故障信号主要由各种频率的谐波成分与冲击响应成分构成,为此构造包含谐波成分与冲击响应成分的仿真信号来验证。
仿真信号表示为

冲击响应信号分量为

高频谐波信号分量为

低频谐波信号分量为

其中:j为阻尼系数;Wn为固有频率。
此信号中j=0.035,Wn=1 500 Hz,采样频率fs=20 kHz,数据长度为N0=2 048,高频频率f2=160 Hz,低频频率f3=50 Hz。由4 个分量构成的仿真信号如图3 所示。

图3 仿真信号的组成图Fig.3 The composition diagram of the simulation signal
应用所提方法对构造的仿真信号进行分解。首先,通过经验模式分解对原始仿真振动信号分解,获得的第1 个高频成分基本模式分量的比值系数ε=0.217 8;其次,设置期望的信号分解相对误差的值为e=0.005,设置调节参数β的初始值为1,步长为1,取值区间为[1,10];然后,以协同信噪比指标为目标函数,经过上述算法流程,可自动计算出β=1 时,协同信噪比指标取得最大值,最大值为CSNR=55.02,这时对应的白噪声幅值标准差为α=0.337 0,进而计算得到最优的总体平均次数为N=4 542;最后,对原始仿真信号用EEMD 重新分解,可得如图4所示的结果。自适应集成经验模式分解方法分解得到 的c2,c5,c6这3 个IMF 分量很好地 对应了仿真 信号的3 个频率成分,分别是冲击响应分量、高频谐波分量和低频谐波分量。可看出,自适应集成经验模式分解方法能很好地将仿真信号中3 个分量准确地分离出来。
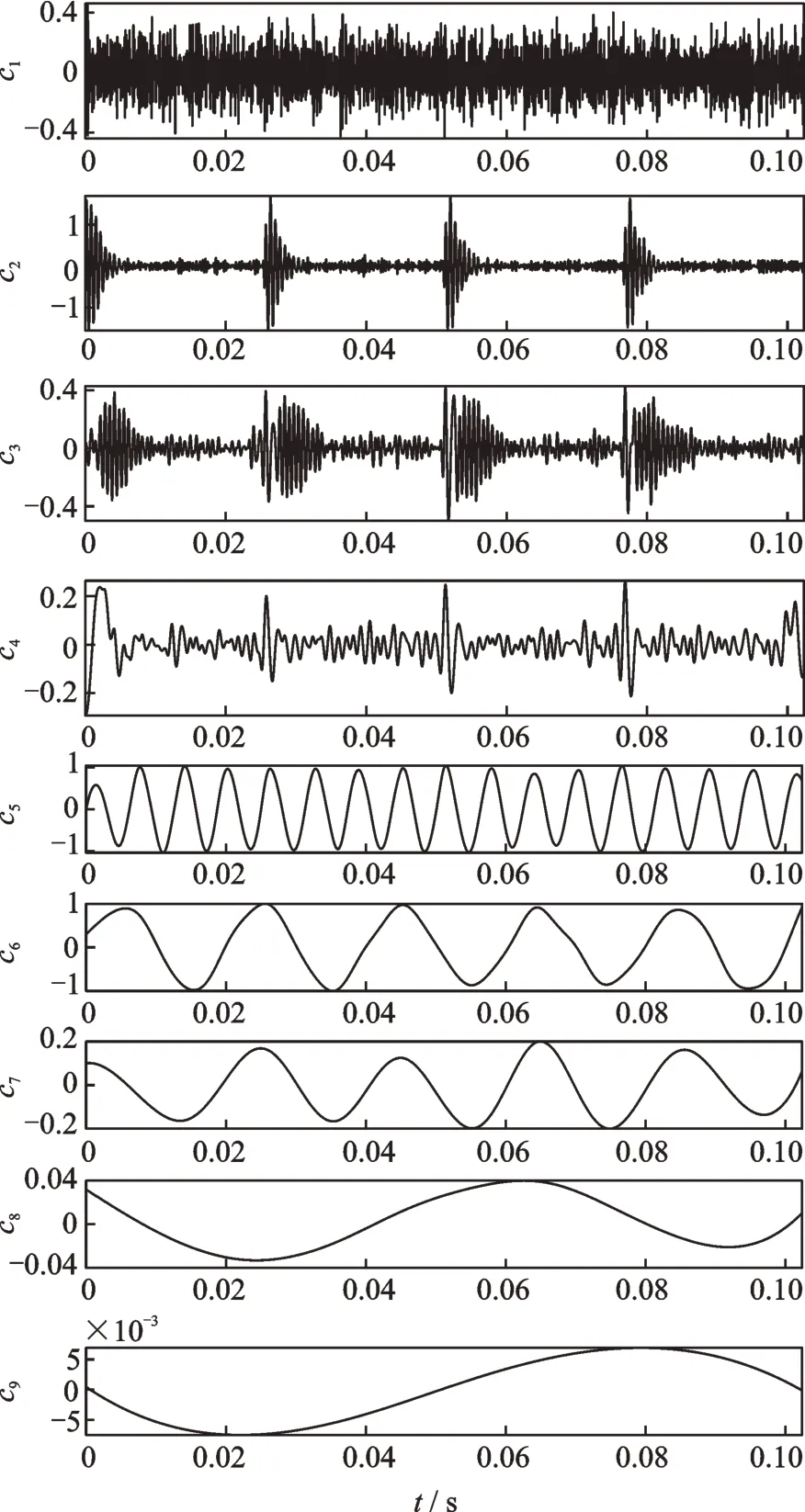
图4 原始仿真信号所提方法的分解结果Fig.4 The analyzed results for the simulation signal based on the proposed method
3.2 工程应用
笔者选取某风场振动异常的6#风电机组发电机振动信号进行工程应用验证。6#风电机组发电机的结构简图及传感器测点分布如图5 所示,其中:①~⑦均为振动加速度传感器;⑧为高速轴转速的接近开关。
6#风电机组高速轴与发电机的联轴器和现场传感器安装位置如图6 所示。
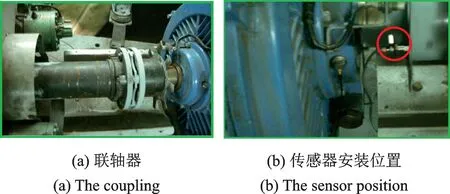
图6 风电机组联轴器及传感器Fig.6 The coupling and the sensor position
选择图5 中测点6 发电机前轴承振动信号进行分析验证,振动信号基本情况如图7 所示。
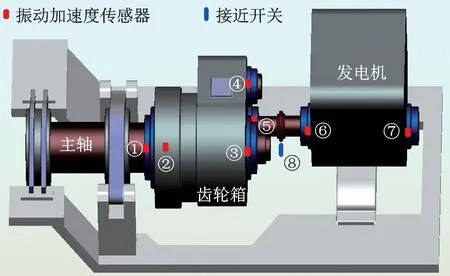
图5 风电机组结构示意图及相应测点分布Fig.5 The structure diagram and distribution corresponding to measurement points on the wind turbine
图7 的时域波形、频谱图及包络谱图中均未观测到明显的轴承故障特征,难以确定发电机前轴承的状态。图7(b)所示的频谱图中,因强噪声的影响,能量集中在高频区域,在低频区域可以看到明显的转频25 Hz。根据现场技术人员的描述,结合轴承松动故障特征,可依稀看到不太明显的转频谐波分量。
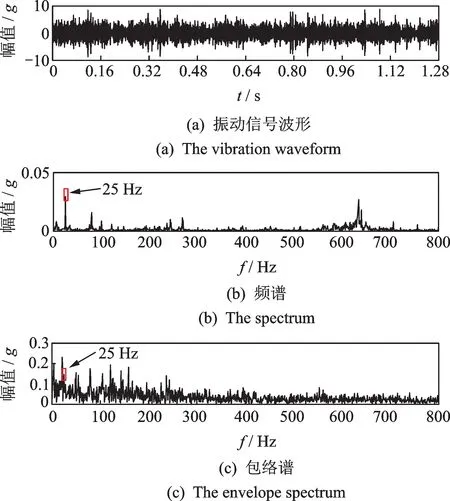
图7 发电机前轴承振动信号波形频谱及其包络谱Fig.7 The vibration waveform and spectrum and envelope spectrum of the generator front bearing
采用笔者所提方法对此振动信号进行分析,根据算法流程,首先得到第1 个IMF 的幅值标准差比值系数ε为1.004 1,设置相对误差e=0.005,可计算出β=1 时,CSNR 取得最大值,为1.011 1,对应的白噪声幅值标准差比值系数α=1.004 1,进而计算得到最优总体平均次数N=40 327,最后得到分解结果,如图8 所示。
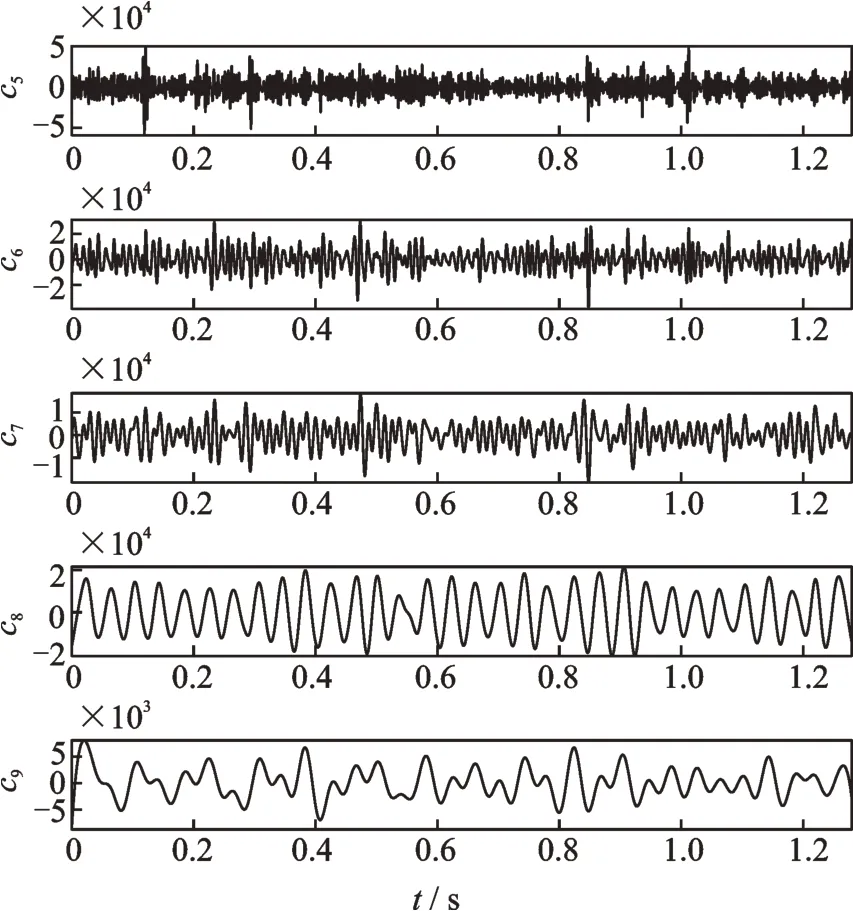
图8 发电机前轴承振动信号所提方法分解结果Fig.8 The analyzed results for the vibration signal of the generator front bearing based on the proposed method
分解结果的频谱如图9 所示。可以清楚地看到,c7基本模式分量的频谱图中很好地包含了转频特征频率25 Hz 及其谐波频率50 Hz 和75 Hz,系统响应频谱中相应的目标信号频率谱峰突出。
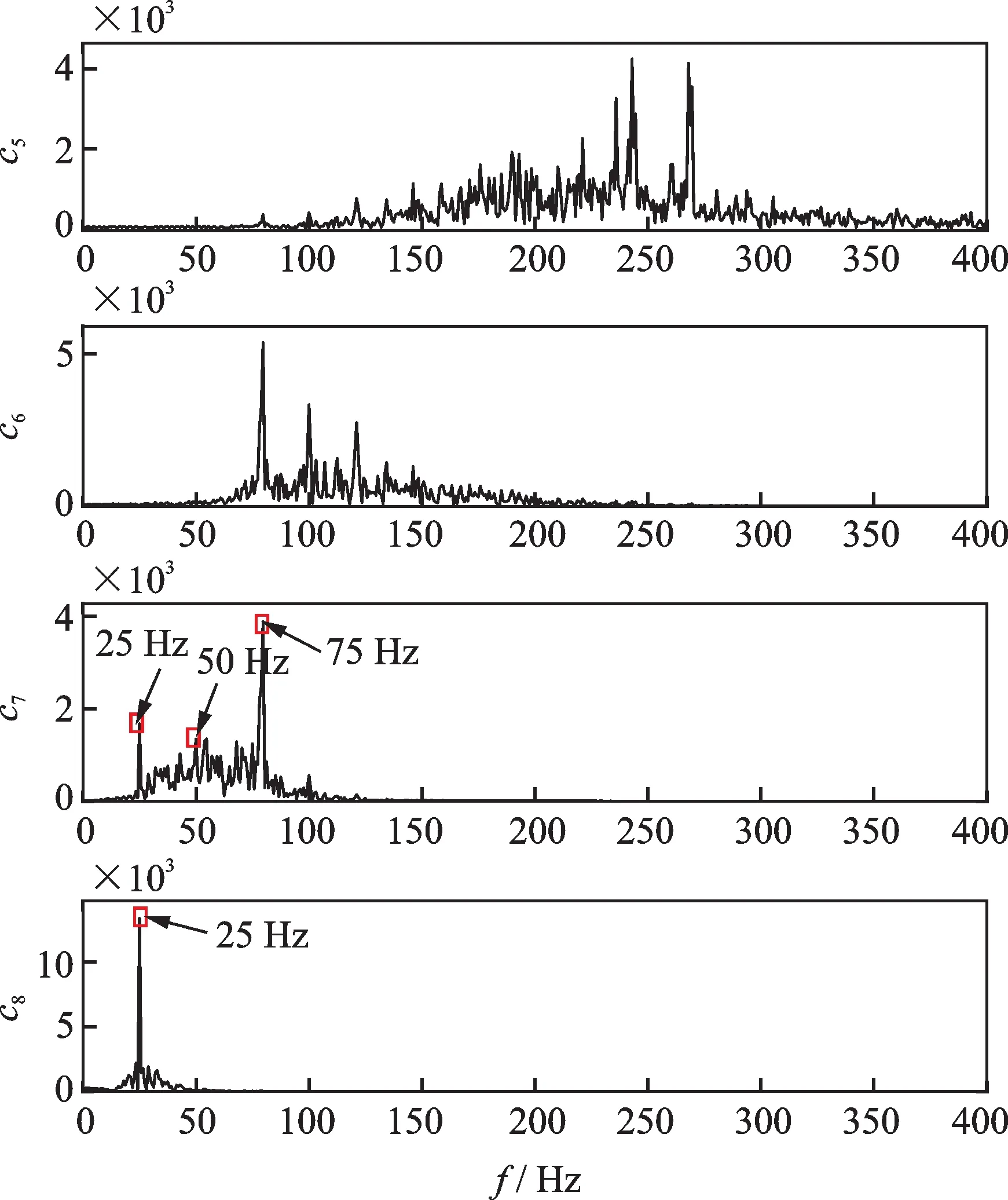
图9 发电机前轴承振动信号所提方法分解频谱图Fig.9 the spectrogram of the analyzed results for the vibration signal of the generator front bearing based on the proposed method
进一步对测点5 齿轮箱高速轴承进行分析,其振动信号的时域波形、频谱及其包络谱如图10 所示。由图可以看出,时域波形杂乱无章,虽能看到一些较为明显的冲击成分,但不规则,无法进行判断;频谱图中,能量主要集中在前中频段,在低频处看到不太明显的25 Hz 转频及其倍频谐波分量,但也没有明显的故障特征信息,无法判断齿轮箱高速轴的情况;包络谱中能看到明显的25 Hz 的转频信息,但并未观察到故障特征信息。
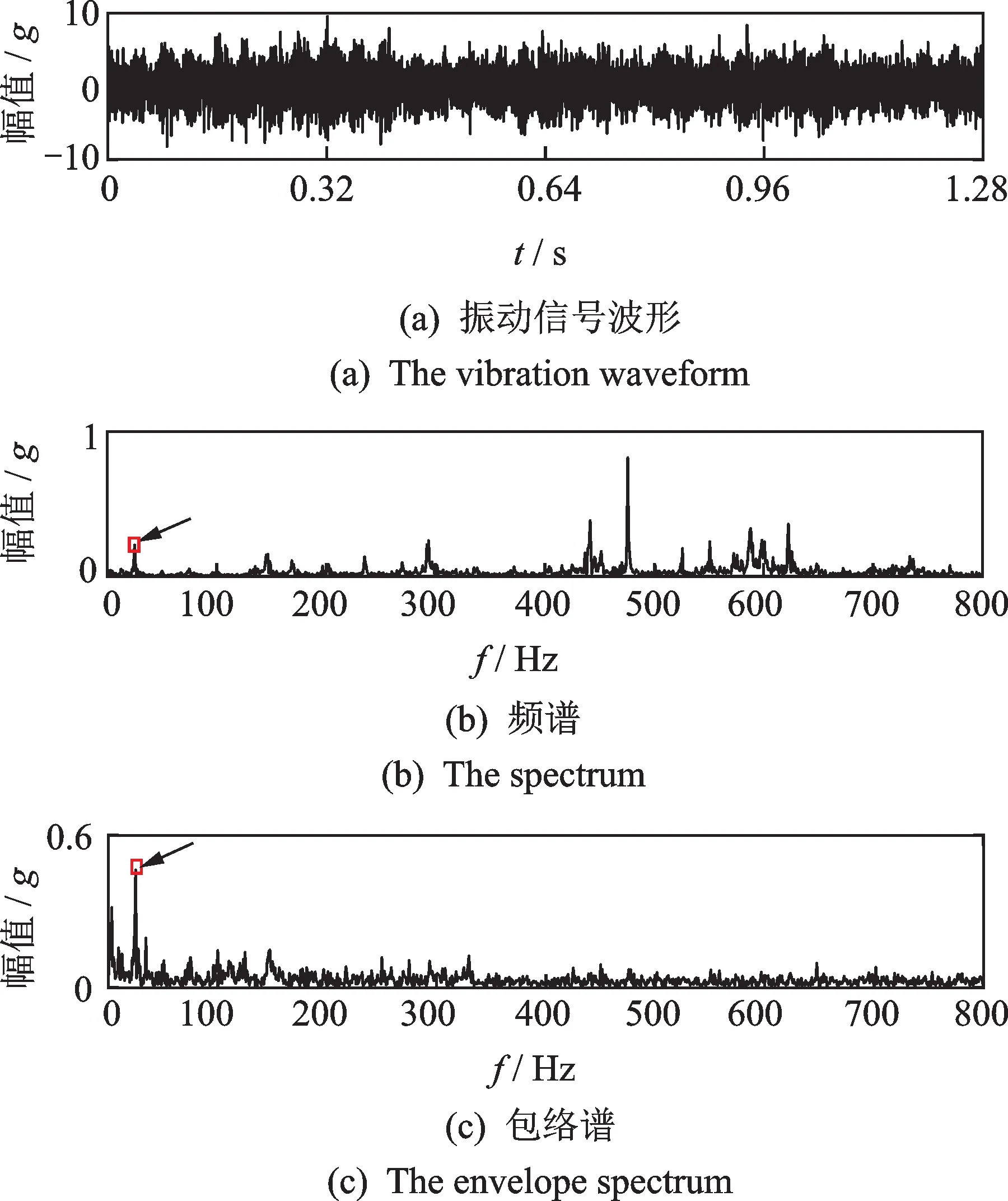
图10 齿轮箱高速轴振动信号波形及其频谱包络谱Fig.10 The vibration waveform and spectrum and envelope spectrum of the gearbox high-speed shaft
图11 所示为用本研究所提方法对齿轮箱高速轴的振动信号进行分解后的基本模式分量。其频谱图如图12 所示。可以看出,c6IMF 分量中转频的3倍 频75 Hz 谱峰明显,c7IMF分量中转频25 Hz谱峰突出。

图11 齿轮箱高速轴振动信号所提方法分解结果Fig.11 The analyzed results for the vibration signal of gearbox high-speed shaft based on the proposed method
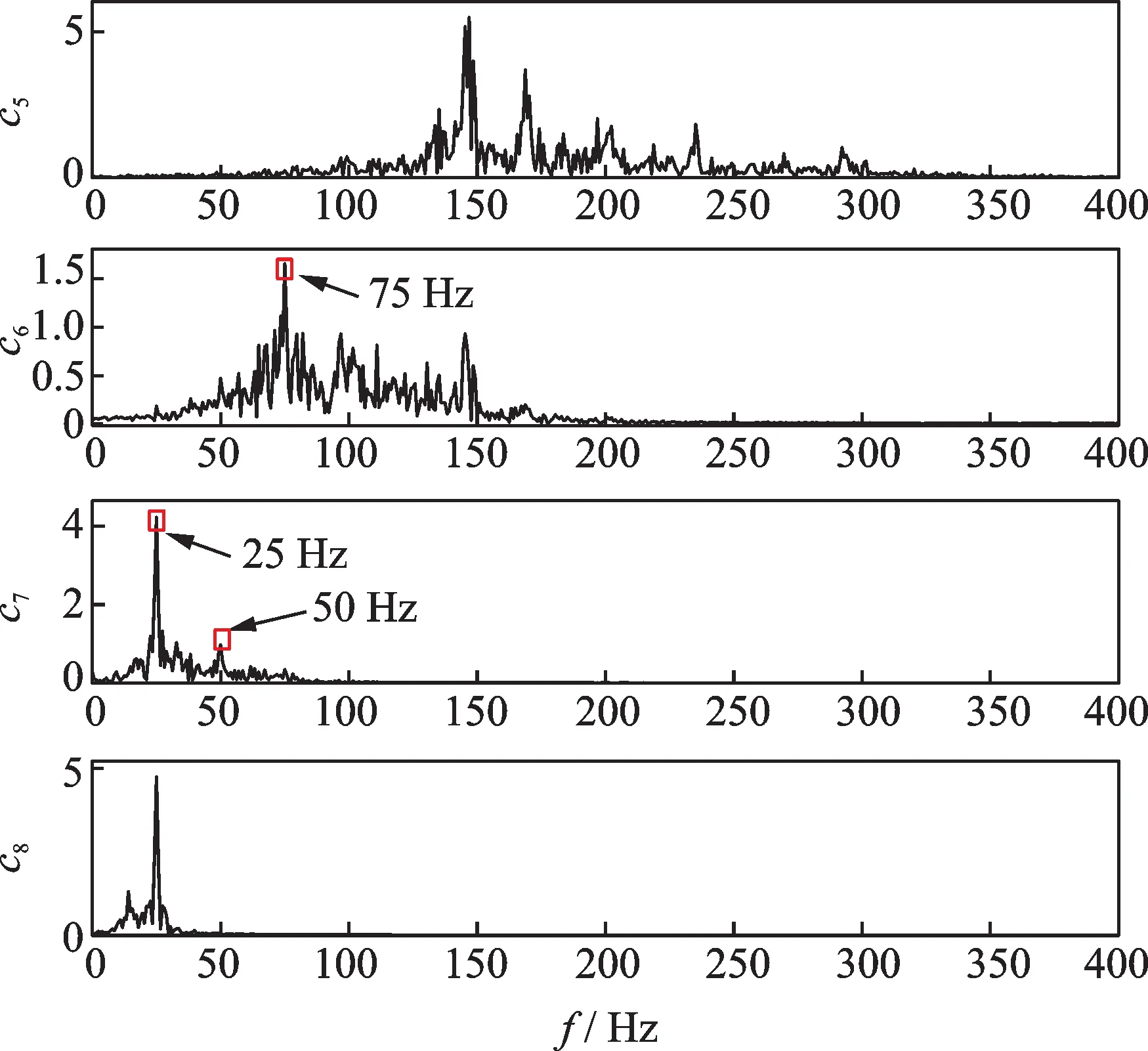
图12 高速轴振动信号所提方法分解频谱图Fig.12 The spectrogram of the analyzed results for the vibration signal of gearbox high-speed shaft based on the proposed method
由测点5 齿轮箱高速轴和测点6 发电机前轴承的振动分析来看,两者的振动信号中均含有相同的转频25 Hz 及其谐波频率50 Hz 和75 Hz 成分,结合现场工作人员的观察,验证了测点5 和测点6 之间即齿轮箱高速轴和发电机前轴承之间的联轴器发生松动故障。
4 结束语
基于协同信噪比CSNR 指标的参数自适应选取,提出了自适应集成经验模式分解的算法流程,揭示了噪声添加的定量机制,基于协同信噪比指标的最优化自适应地求解出其对应的最优参数,从而实现添加精确幅值的噪声及精确的集合平均次数,有效解决了人为设定加噪方式及幅值大小与集合平均次数的不合理问题,实现了故障特征频率的自适应提取,提高了EEMD 方法对微弱故障特征信号的检测能力。数值仿真数据及风场风机联轴器故障的工程应用均验证了该方法的有效性。
猜你喜欢
振动与冲击(2022年22期)2022-12-01
装备维修技术(2022年7期)2022-07-01
现代仪器与医疗(2022年1期)2022-04-19
计算机技术与发展(2020年9期)2020-11-26
World Journal of Cardiology(2020年10期)2020-11-25
舰船电子对抗(2020年1期)2020-04-27
北京航空航天大学学报(2019年9期)2019-10-26
雷达学报(2017年3期)2018-01-19
电子制作(2017年7期)2017-06-05