基于失调理论的曲轴扭转减振器参数优化研究*
2022-05-21 03:10谭小东杨少波杨金才李凤琴艾晓玉冉绍伯
振动、测试与诊断 2022年2期
谭小东,杨少波,杨金才,余 波,李凤琴,郝 涛,艾晓玉,冉绍伯,李 捷
(1.重庆长安汽车股份有限公司汽车研究总院 重庆,400020)
(2.汽车噪声振动和安全技术国家重点实验室 重庆,400020)
引言
发动机曲轴的扭振会使曲轴产生附加应力,在共振转速范围内引起较大噪声,影响到发动机的NVH 性能与曲轴和轮系附件的疲劳耐久性。对P0混动架构而言,曲轴前端较大的扭振会调制电机产生边频阶次噪声,也关乎电机的运行效率与使用寿命。随着发动机朝大功率高转速迈进与P0 混动技术的蓬勃发展,曲轴的扭振控制技术受到了工程技术人员越来越多的关注。
在曲轴前端安装TVD 是抑制曲轴扭转共振最常用的方法,目前已有大量学者对安装在发动机曲轴上TVD 的优化匹配问题进行了比较深入的研究[1-5]。TVD 的参数设计方法有多种,由于其原理与动力吸振器(dynamic vibration absorber,简称DVA)和调谐质量阻尼器(tuned mass damper,简称TMD)相同,故在设计时可以参照DVA 和TMD 的研究方法。在与多自由度主振系统相匹配的减振器参数优化中,目标函数的选择有多种形式,大致可分为:极小化其中一个自由度的共振峰值或最大加速度[6-7];极小化所有自由度共振峰值的加权或平方和[8-9];极小化某两个自由度之间的最大传递率[10-11];极小化主振系统的最大功率流[12-13]。
针对曲轴TVD 的参数优化,最简单与常见的方法为模态惯量法,即将曲轴多自由度系统在前端等效成一个单自由度系统,再利用最优同调公式计算出TVD 的参数[14]。这种方法的核心思想是通过在等效后的单自由度主振系上附加一个质量(惯量)系统,将原系统的一个共振峰分成两个较低且等高(最优同调)的共振峰。该方法虽然简单快捷,但存在以下几种因素,导致使用该方法优化的TVD 仅在等效后的单自由度主振系统中最优同调,而在实际的曲轴多自由度系统中并不同调:①Den Hartog 的最优同调公式是基于无阻尼主振系推导得到的,而实际的多自由度主振系是存在阻尼的;②当前TVD 的橡胶所能提供的最大阻尼值无法达到用Den Hartog最优同调公式计算出的最优阻尼值;③Den Hartog在推导最优同调公式时假定激励力(力矩)的幅值是固定不变的,但发动机输出的各阶次交变力矩幅值是随转速变化的。
当前针对TVD,DVA 与TMD 的所有参数设计方法研究大多是围绕优化系统能量、位移、速度、加速度、传递率及功率等目标展开,目标函数大多是将最大目标值最小化,其结果均是将原系统的一个高峰分成两个等高度的低峰。以上方法均能设计出具有一定减振效果的TVD,但在实际的工程应用中,通常希望将曲轴与TVD 耦合后较低的共振峰留在常规转速区间,将较高的共振峰推向发动机转速较少到达的高转速区间,而最优同调设计是得到两个相等高度的共振峰,显然无法实现这一愿望。此外,发动机前端的响应由各个阶次的响应叠加后得到,多个阶次的激励均会激发起曲轴系统共振,而最优同调公式只是在一个阶次激励下推导得到,故无法有效调整曲轴前端Overall 峰值高低。因此,对TVD 的参数进行设计时若直接应用Den Hartog 的最优同调理论明显存在不足之处,无法实现TVD与曲轴的合理匹配。
笔者以某款发动机的曲轴为扭振模型,通过对Den Hartog 的最优同调理论进行研究推广,以安装TVD 后曲轴Hub 端在全转速段的Overall 角加速度曲线与理想直线的最大相对误差最小化为目标函数,提出了一种能够更好实现TVD 与曲轴合理匹配的新方法。试验测试结果表明,用本方法设计出的TVD 能够更好地控制发动机的前端扭振与加速噪声。
1 Den Hartog 最优同调理论简介
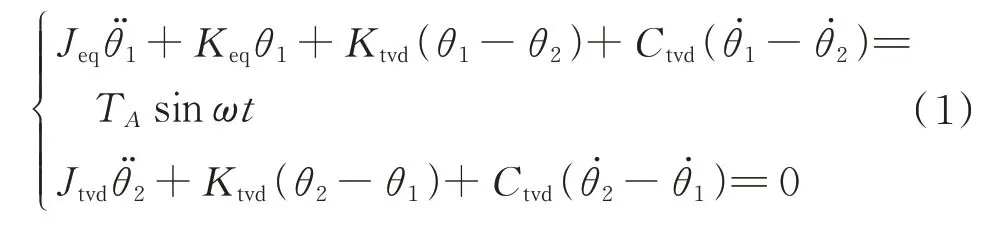
在图1 所示的二自由度扭振系统中:Jeq为主振系统的惯量;Keq为主振系的刚度;Jtvd为TVD的惯量;Ktvd为TVD 的刚度;Ctvd为TVD 的阻尼系数;TA为激励力矩幅值;ω为激励频率;t为时间。

图1 TVD 与单自由度无阻尼系统匹配模型Fig.1 TVD and an undamped single degree of freedom system
主振系统与TVD 的角位移分别用θ1和θ2表示,则系统的振动方程为
求得主振系统稳态解的振幅为

为便于理论分析,引入下列无量纲符号,如表1所示。

表1 参数符号及物理意义Tab.1 Definitions of the different parameter symbols
主振系统的振幅与静变形之比(振幅比)可以表示为

当主振系振幅曲线中的两个峰值同时降至最低时,TVD 处于最优同调状态。利用定点定理可以求得最优同调状态下TVD 的频率与阻尼计算公式。
当TVD 的刚度与惯量不变时,无论TVD 的阻尼系数如何变化,无阻尼主振系的频响曲线均通过两个定点。定点P与Q可以通过在式(3)中分别令ξ=0 与ξ=∞使两条曲线相交得到,如图2 所示。

图2 定点P 和Q 的定义Fig.2 Definition of fixed points of P and Q
当ζ=0 时,主振系振幅比的平方为

当ζ=∞时,主振系振幅比的平方为

联立式(4)与式(5),可得P和Q两点所在的方程,利用等比定理可得

将式(6)两边同时开方可得

故无论ζ如何变化,P和Q两点均在无阻尼主振系的振幅曲线上,此为定点定理。当这两个定点等高且恰好分别处于两个共振峰顶点时,TVD 具有最好的减振效果。
将式(4)与式(5)联立可得

根据韦达定理,P和Q两点满足函数关系

当P和Q两点等高时,由于这两点都在ζ=∞的振幅比曲线上,由式(5)可以得到

将式(9)与式(11)联立,可得两定点等高时的频率比为

将式(12)代入式(8)中可以求得P和Q两点的频率比gP与gQ,在式(3)中通过调整TVD 的阻尼系数让振幅倍率曲线在通过P和Q两点时导数近似为0,以此确保P和Q两点恰好处于振幅倍率曲线的峰值位置。通过计算,最后得到TVD 的最优阻尼比[14]为

2 失调与过调理论
在实际工程应用中,针对某些特殊情况需要对最优同调理论加以推广。如当主振系统的原固有频率靠近激励频率的上限时,由于激励频率激发起安装TVD 后左侧峰值的概率远大于右侧,此时可以通过调整TVD 的参数使左侧峰值低于右侧峰值,即采用失调设计。
利用定点定理,可以推导出失调与过调理论,详细证明过程如下。
令左侧定点P低于右侧定点Q,式(10)变为

将式(15)与式(9)联立得

同理可得,若左侧定点P高于右侧定点Q,需满足

在保持TVD 惯量与阻尼系数不变的情况下,降低TVD 频率,使主振系统左侧峰值降低,右侧峰值升高,称为失调;反之,增大TVD 频率,使主振系统左侧峰值升高,右侧峰值降低,称为过调。
在图3 所示的模型中,令μ=0.3。当主振系统的固有频率靠近激励频率的下边界时,可以采用过调设计使左侧峰值略高于右侧峰值,将TVD 的频率调整至同调频率的1.1 倍,此时主振系统的振幅倍率曲线如图4(a)所示。当主振系统的固有频率靠近激励频率的上边界时,可以采用失调设计使左侧峰值略低于右侧峰值,将TVD 的频率调整至同调频率的0.9 倍,此时主振系统的振幅倍率曲线如图4(b)所示。通过以上计算可知,在工程上可以根据实际情况,通过调整TVD 的频率来改变主振系统的左右峰值。
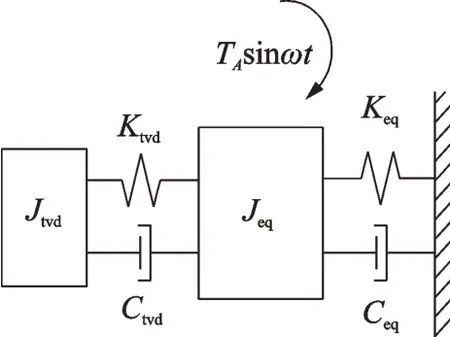
图3 TVD 与单自由度阻尼系统匹配模型Fig.3 TVD and a damped single degree of freedom system
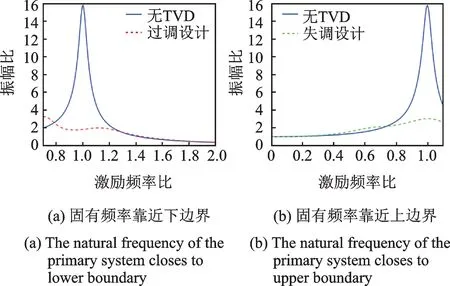
图4 主振系的固有频率靠近激励频率边界时的TVD参数优化Fig.4 TVD parameters optimization for the conditions that the natural frequencies of the primary system close to boundaries of excitation frequency
3 TVD 参数优化分析
3.1 曲轴扭振模型的建立
笔者采用集中质量法建立曲轴扭振模型。根据简化原理及等效计算方法[15],建立包含7 个自由度的扭振模型,如图5 所示。扭振模型中各个自由度所代表的零部件名称如表2 所示。
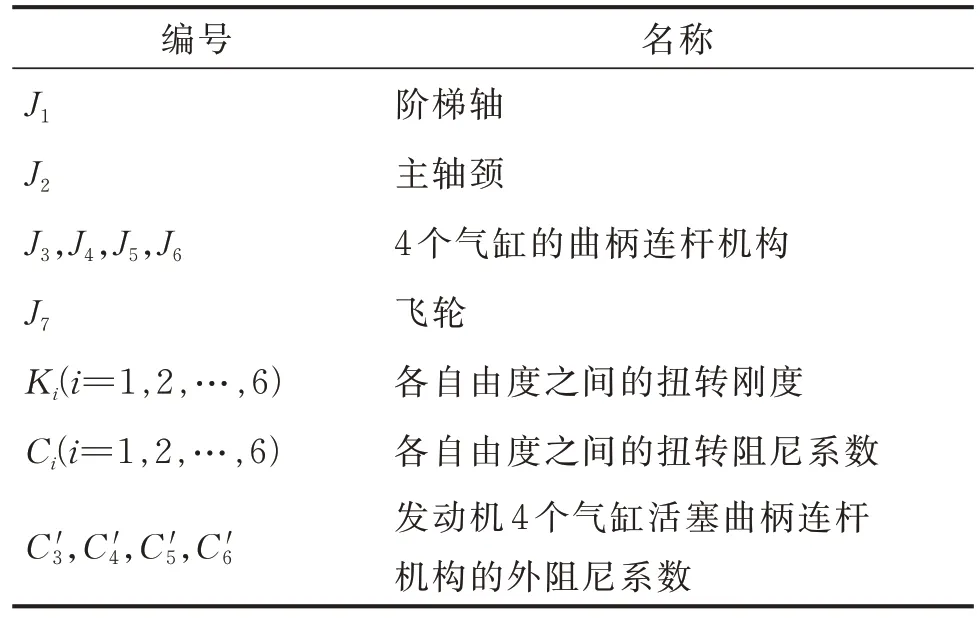
表2 扭振模型各自由度含义Tab.2 Definitions of the different degree of freedom in the torsional vibration model
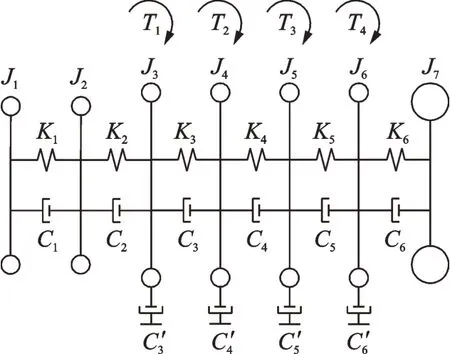
图5 发动机曲轴扭振模型Fig.5 Torsional vibration model of the crankshaft
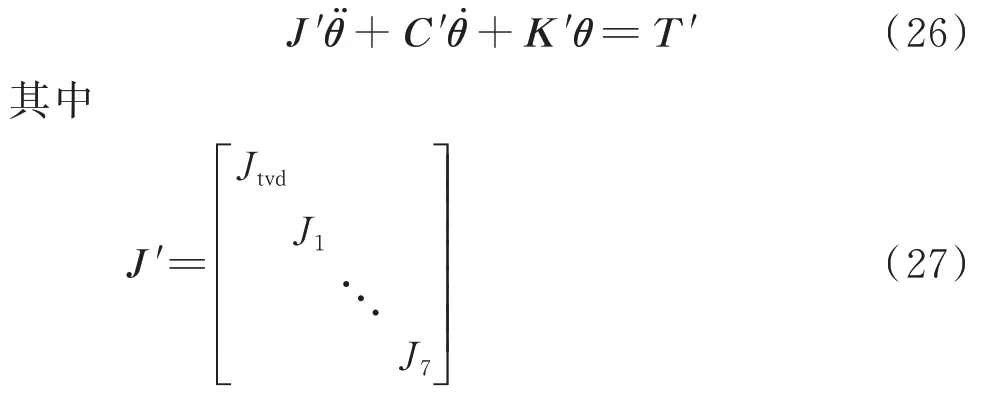
曲轴扭振方程为

其中:J,C,K分别为7×7 阶的转动惯量矩阵、扭转阻尼矩阵和扭转刚度矩阵;分别为7 维的扭振角位移、扭振角速度、扭振角加速度的列向量;T为激励力矩列向量。


以发动机全油门(wide open throttle,简称WOT)加速工况为例,在不同转速下气缸的缸压不同,输出力矩亦不同,故需将多个转速下的缸压作为仿真时的输入,从1~5.3 kr/min,约每隔250 r/min取1 组缸压,每个转速所对应的角速度记为ωi,i=1,2,…,18。以某一角速度ωi为例,将各个气缸的输出力矩通过傅里叶级数展开得到各谐次激励力矩,考虑到气缸点火顺序为1—3—4—2,各气缸的输出力矩可以表示为
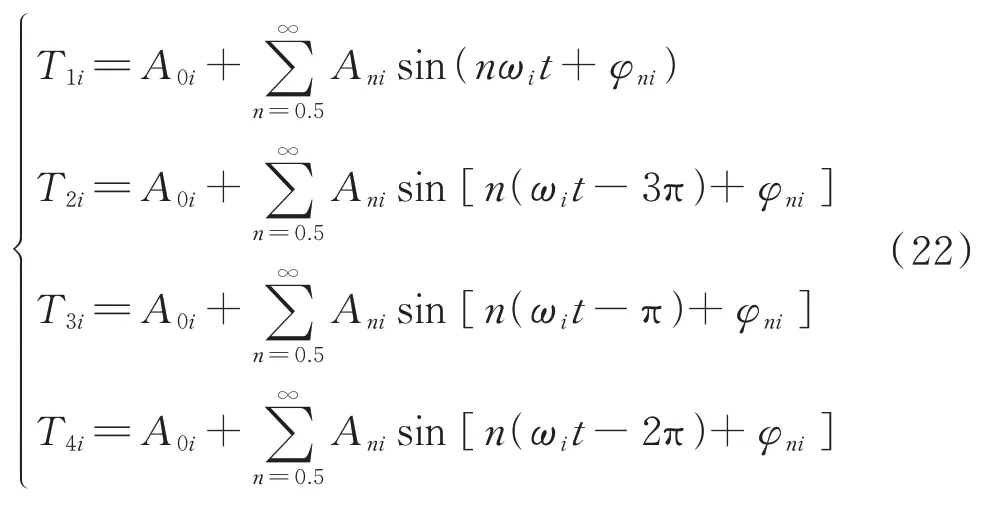
其中:A0i为单个气缸输出的平均力矩;Ani为各谐次力矩的幅值;φni为第1 个气缸中各谐次力矩的相位;n=0.5,1,1.5,…。
故在角速度ωi下的激励力矩列向量为Tωi=。对每一个转速下的气缸输出力矩均完成上述计算,作为不同转速下的激励,有T=[Tω1,Tω2,…,Tω18]。
3.2 自由振动分析及单自由度系统的等效
对扭振系统进行固有特性分析,通常用无阻尼自由振动模型来简化计算,即

求解特征方程得到第1 阶固有频率ωn为423 Hz,所对应的振型如图6 所示。可以看出,当这一阶模态发生共振时曲轴前端的振动较剧烈,从前往后振动逐渐减小,在后端飞轮处振动降到最低。

图6 曲轴扭振第1 阶模态振型Fig.6 First order mode shape of the torsional vibration model of the crankshaft
在多自由度振动系统中,TVD 应当安装在共振时振幅最大的自由度上以吸收尽可能多的能量。由图6 可知,TVD 应当安装在曲轴前端,即第1 个自由度上。在第1 阶模态上,曲轴在第1 个自由度处的模态惯量为

其中:[y1…yj…y7]T为振型。
模态刚度Keq可以由下式求出

3.3 TVD 同调参数计算
TVD 与曲轴耦合后的力学模型如图7 所示。

图7 TVD 安装在曲轴上的力学模型Fig.7 Torsional vibration model of the crankshaft equipped with a TVD
振动方程为

由式(24)计算得到Jeq=0.010 3 kg·m2,通常惯量比μ取0.3,具体原因如下。
在图1 所示的二自由度系统中,当TVD 处于最优同调状态时,主振系振幅比的峰值为,与惯量比μ的关系曲线如图8 所示。

图8 TVD 最优同调时主振系的最大振幅比与μ 的关系曲线Fig.8 Relation of the largest vibration amplitude ratio of a primary system and μ with an optimally tuned TVD
由图8 可以看出,若μ在0.4 的基础上增大,主振系的最大振幅比降幅不大;若μ在0.2 的基础上减小,最大振幅比增幅较大。在工程上需综合考虑减振效果、轻量化设计与可实施性等因素,故μ通常取0.3 左右。本研究所述三元乙丙(ethylene propylene diene monomer,简称EPDM)橡胶TVD 无法提供最优同调时所需的阻尼比,需要更大的TVD 惯量才能达到最优同调时的效果,但考虑到曲轴的轻量化设计与工程上的可实施性,μ仍然取0.3。
在对曲轴的TVD 进行参数设计时,常以曲轴前端的角加速度作为评价TVD 减振性能的标准。关于主振系统加速度同调的TVD 参数计算公式[14]为

由式(31)与式(32)计算得到ωtvd为371 Hz,ζ为0.27。在工程上不同橡胶TVD 的阻尼比不同,如EPDM 橡胶TVD 的阻尼比在0.06 左右,具体数值可由试验测试结果反推得到。
当使用EPDM 橡胶TVD 时,曲轴前端(TVD的Hub 端)的各阶次角加速度与Overall 角加速度如图9 所示。可以看出,4 阶激励激发起的TVD 与曲轴耦合系统的第1 阶模态共振在Overall 曲线中贡献较大,Overall 曲线线性度较差,需对TVD 进行参数优化。根据本研究所提理论,应适当降低TVD频率使其进一步失调,即降低各阶次激励激发的第1 阶模态共振峰,提升第2 阶模态共振峰,使Overall曲线随转速呈近似线性增长。

图9 曲轴Hub 端各阶次及Overall 角加速度曲线Fig.9 Angular acceleration responses for each order and Overall levels of the Hub
3.4 TVD 参数优化设计
设TVD 的频率调整因子为β,则实际频率为初始值371 Hz 乘以β。以β为优化变量,以安装TVD后曲轴Hub 端的Overall 角加速度曲线与理想直线的最大相对误差最小化为目标函数。优化模型为

其中:F(β)为Overall 角加速度曲线与理想直线相对误差的最大值;x(ω)为Hub 端Overall 角加速度频率响应;Xn(n=2,4,…,10)为各阶次角加速度频率响应;φn(n=2,4,…,10)为各阶次角加速度相位角;L(ω)为1 kr/min 与5.3 kr/min 两个边界转速(频率)对应的角加速度连成的线性函数;δ(ω)为Overall 角加速度曲线与理想直线的相对误差;ω为角速度。
调用Matlab 软件中的fmincon 优化求解器,通过优化得到β为0.81,优化后TVD 的Hub 端Overall角加速度与优化之前对比如图10 所示。可以看出,优化后各阶次激励激发起的第1 阶共振峰明显降低,从整体来看线性度更好,有“削峰填谷”之效,故可以认为优化是合理的。
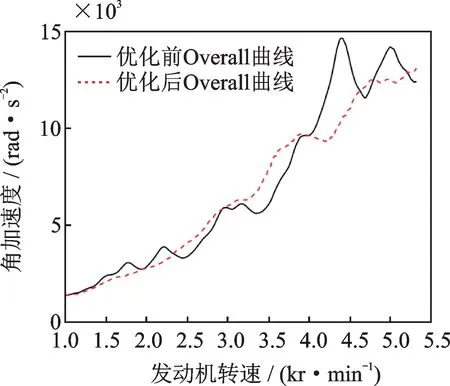
图10 TVD 优化前后的Hub 端Overall 角加速度曲线对比Fig.10 Comparison of the Overall angular acceleration responses of the Hub prior to and after optimization
4 试验测试
4.1 TVD 频率对NVH 性能影响测试
为了研究优化前后两个TVD 对扭振与噪声的影响,验证本优化方法的正确性,在半消声室内发动机台架上对曲轴Hub 端进行扭振测试,在发动机进气侧、排气侧、前端轮系侧与顶部距离发动机1 m 位置处布置麦克风测试声压级。Hub 端扭振传感器布置如图11 所示,麦克风布置如图12 所示。

图11 Hub 端扭振测试Fig.11 Testing of the torsional vibration responses of Hub

图12 发动机1 m 声压级测试Fig.12 Testing of the 1 meter sound pressure level of engine
TVD 优化前后的Hub 端扭振实测结果对比如图13 所示,可以看出4,6,8,10 阶激励激发的TVD与曲轴耦合后的第1 阶共振峰出现大幅度降低,TVD 优化后减振效果明显提升。1 m 平均声压级测试结果对比如图14 所示,优化前1 m 平均声级在1 800,2 350,3 150,4 500 r/min 附近超标,这些声压级峰值与扭振峰值相对应,TVD 经过优化后这些峰值全部降至目标线以下。

图13 TVD 优化前后Hub 端Overall扭振响应测试结果对比Fig.13 Comparison of the testing results of the torsional vibration Overall responses of Hub prior to and after optimization

图14 TVD 优化前后1 m 平均声压级测试结果对比Fig.14 Comparison of the testing results of the 1 meter average sound pressure level prior to and after optimization
4.2 TVD 阻尼比的测试方法
在发动机台架测试时,分别测试Ring 端与Hub端的扭振响应,测试时需确保Ring 端不连接皮带。此时Ring 端的振动方程为

可得Ring 端与Hub 端的振幅比为

当激励频率等于TVD 的固有频率,即ω=ωtvd时,有

其中:ζ1为阻尼比(不同于表1 中的ζ),大小为Ctvd/(2Jtvdωtvd)。
分别导出某阶次(通常是6 阶,需要激发起TVD 的固有频率)的Ring 端与Hub 端频响数据,按式(36)进行运算,当实部大小为1 时,所对应的频率即为TVD 的固有频率,根据虚部大小即可反推得到阻尼比ζ1。
通过对不同频率、不同类型橡胶的TVD 进行测试,发现EPDM 橡胶TVD 的阻尼比在0.06 左右,而乙烯丙烯酸酯(acrylate ethylene monomer,简称AEM)橡胶TVD 的阻尼比在0.11 左右。此研究结果可以作为仿真时TVD 阻尼的输入参数,提升了仿真结果的准确性。
5 结论
1)本研究所提方法能够使Hub 端Overall 角加速度与发动机1 m 平均声压级随转速呈近似线性增长,实现了TVD 与曲轴的合理匹配。
2)提出了选择TVD 惯量大小的方法,即通过计算Hub 端的模态惯量,在综合考虑减振效果、轻量化设计、可实施性等因素下选取适当的惯量比。
3)建立了TVD 阻尼的测试方法,通过此方法能够准确测试得到不同橡胶TVD 的阻尼大小,将此作为仿真时TVD 阻尼的输入参数,提升了仿真结果的准确性。
4)对于P0 混合动力系统,通过TVD 控制发动机前端扭振,能够降低扭振对电机阶次的调制深度,从而有效抑制电机的边频阶次噪声。
猜你喜欢
电力系统保护与控制(2022年19期)2022-10-21
现代电力(2022年2期)2022-05-23
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电子技术与软件工程(2019年5期)2019-06-20
汽车工程(2019年4期)2019-05-07
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
中国水运(2015年1期)2015-02-02
科技致富向导(2013年23期)2014-01-09