
基于扩张观测器的重载机械臂自适应鲁棒控制
2022-05-26 13:00常景岚张高峰曹秀芳杨秀萍王收军
制造业自动化 2022年5期
常景岚,张高峰,曹秀芳,杨秀萍*,王收军
(1.天津理工大学 天津市先进机电系统设计与智能控制重点实验室,天津 300384;2.天津理工大学 机电工程国家级实验教学示范中心,天津 300384;3.南京晨光集团有限责任公司,南京 210006)
0 引言
随着科技水平的发展,机器人技术与我们的生活息息相关,而重载机械臂作为机器人的重要分支,凭借其可以大负载作业、人工成本低、生产效率高和安全等特点被广泛应用在矿山机械、治金炼金等领域[1]。
为了提高机械臂的控制精度,学者们通过建立机械臂动力学模型,采用模型预测、自适应PID、神经网络自适应、轨迹跟踪自适应、滑模变结构以及鲁棒自适应等控制策略[2~4]。电液伺服系统作为机械臂中重要的传动系统,其中存在大量非线性特性和模型不确定性[5],文献[6]联合两个观测器与PID模块作为控制器应用在两关节机械臂,但未考虑机械臂变负载情况。文献[7]采用自适应滑模法控制两关节机械臂,但电液系统模型忽略了液压缸的许多干扰因素。文献[8]采用三阶自抗扰控制方案应用在6自由度机械臂后臂液压缸上,相对于传统PID控制有了很大性能提升。
因此,本文针对重载机械臂电液伺服系统受摩擦影响大、变负载、存在不匹配干扰等特点,设计了一种基于扩张状态观测器的自适应鲁棒控制器。其中,扩张状态观测器用于估计系统不匹配干扰并在控制器中前馈补偿,自适应鲁棒控制器通过参数自适应既保证系统具有良好稳态、瞬态性能,又减少了控制器对高增益反馈的依赖。
1 重载机械臂简介
本文提及的重载机械臂包含7个自由度,其中3三个关节由液压缸驱动,其余关节由液压马达驱动。通过SolidWorks对机械臂各零件建模,装配完成后如图1所示。其中,回转马达驱动机械臂主体在平面内做圆周运动;两个俯仰缸驱动机械臂大臂俯仰运动;伸缩缸驱动机械臂腕部伸缩运动;平摆马达实现机械臂腕部的左右摆动;进退缸、滚摆马达和俯仰马达分别驱动机械手做前后进退运动、左右滚摆运动和上下俯仰运动。
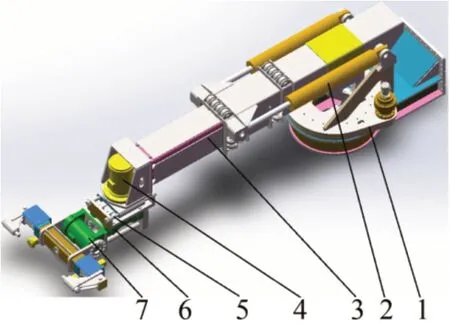
图1 重载机械臂模型
2 电液系统模型的建立
限于篇幅原因,本文给出俯仰缸的数学模型,其他液压缸和液压马达可根据各自数学模型应用本控制器达到相同控制效果。俯仰缸为单杆活塞缸,行程为795mm,速度为0~40mm/s,额定负载为227KN。由于重载和低速运动情况下系统的摩擦力影响是非常大的,本文采用Stribeck摩擦模型[9],对于造成的误差以及其余未建模部分可以归属到不确定扰动中。Stribeck摩擦模型如下:

式(1)中:v为运动速度;B、Af、Fj分别为粘性阻尼系数、库伦摩擦系数、最大静摩擦力,vs为Stribeck速度,θ为经验参数。
将Stribeck摩擦模型进行线性化[10]:

式(2)中:Fs为Stribeck摩擦参数。
俯仰缸电液伺服系统运动学方程为:

式(3)中:m为负载质量;y为液压缸输出位移;为p1、p2液压缸左右两腔压力;A1、A2为液压缸左右两腔活塞的工作面积;Sf()、d(x,t)分别为类似于sgn(y˙)的可微连续函数、建模误差和未建模部分。
对于液压缸两腔的压力:

式(4)中:V1、V2分别为液压缸左右两腔实际容积;E为液压油弹性模量;Ct为液压缸泄露系数;pL=p1-p2为液压缸左右两腔压差;q1、q2分别为伺服阀流入和流出液压缸左右两腔的流量。
假设1:伺服阀对称匹配,伺服阀频宽远大于系统频宽,则对于伺服阀流量有:


假设3:系统参考的指令信号x1d(t)三阶连续有界。
3 含扩张状态观测器的自适应鲁棒控制器
3.1 扩张状态观测器设计
将式(6)中的d(x,t)扩张为冗余状态xe,并令xe=-d(x,t)/m,设计扩张状态观测器为:

3.2 控制器设计
定义如下不连续映射:

式(10)中:Γ>0为自适应增益,且为正定对角矩阵,τ为自适应函数。通过分析可知,参数的范围可控,且相同于式(7)中φ的范围,可得出如下性质:

定义下面误差变量:

式(12)中:e1表示系统跟踪误差。
由式(6)、式(12)可得:

为了使e2趋于0,将x3看做式(13)中的一个控制输入,并设计控制函数α2:

式(16)中:σ1为大于零的控制器设计参数;k2s2>0为非线性反馈增益[5]。
由e3定义以及式(6)得知:

式(18)中:k3s1为控制器参数,且k3s1>0;ua是模型补偿项;ub为系统线性稳定反馈;uc为非线性反馈。
将式(18)代入式(17)可得:

选择合适的uc从而满足如下条件:

式(20)中:σ2为大于零的控制器设计参数;k3s2>0为非线性反馈增益[5]。
4 控制器性能及稳定性分析
设计参数k1,k2s1,k3s1,使下面矩阵Λ为正定矩阵:

令自适应函数τ=η2e2+η3e3,设计的控制器u具有如下性质:①系统中所有信号皆为有界信号。②经过某一时刻后,干扰准确估计,即−xe=0,则此时控制器u在保证结论①的同时,还可以获得渐近跟踪性能,即。
证明:对于性质①设置如下李雅普诺夫函数:

对式(22)中李雅普诺夫函数微分,结合式(12)、式(15)、式(19)可得:
根据式(16)、式(20)和正定矩阵式(21)可得:

因此V有界,结合式(22)可证明性质①。
对于性质②,当−xe=0时,即=0,则可定义如下李雅普诺夫函数:


图2 控制器结构框图
5 仿真验证


Stribeck摩擦模型如图3所示。
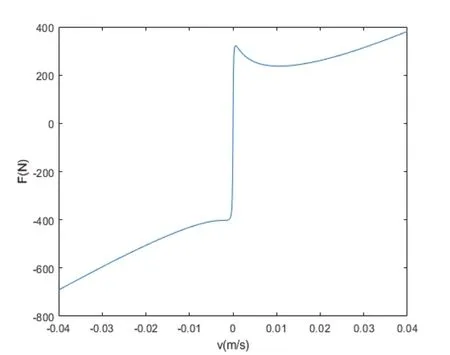
图3 Stribeck摩擦模型
控制器参数参数如下:
1 )基于扩张状态观测器的自适应鲁棒控制器(ESOARC):k1=2 5 0,k2s1+k2s2=2 6 0,k3s1+k3s2=80,Γ=diag[50,20,200,1×10-25] 1 ×10−25],φmin=[12000,450,1500,1×10-12],φmax=[13000,550,2500,1×10-11],φ(0)=[12000,450,1500,4×10-12],观测器参数ω0=2000。
2)自适应鲁棒控制器(ARC)。不包含干扰估计部分,系统参数与基于扩张状态观测器的自适应鲁棒控制器相同。
工作条件如下:0~20s机械臂为空载运动,2个俯仰液压缸各负载机械臂自重m=2000kg一半质量,建模误差和未建模部分d(x,t)=200sin(t);20s后机械臂负载增加1000kg,由于负载增加会导致d(x,t)随之增加,d(x,t)=500sin(t)。仿真期间液压缸在额定速度下伸缩3个周期,x1d=0.1sin(0.4t)。
仿真指令信号如图4所示。分析图5,0s~20s期间ARC的跟踪误差为-1.3mm~0.3mm,ESOARC的跟踪误差为-0.4mm~0.1mm,20s后由于负载突然的增大,ARC的跟踪误差突然增大到10mm,通过图4也可发现20s时ARC轨迹明显偏离指令信号,相比之下ESOARC仍能很好的跟踪指令信号,突然的变负载对其影响很小,因此ESOARC鲁棒性更加优越。分析图6,可以看出ESOARC的输出信号更加平滑,适合于实际系统中应用。图7验证了设计的观测器可以有效对系统中不确定性干扰进行估计。

图4 指令信号

图5 跟踪误差

图6 控制信号

图7 观测器干扰估计
6 结语
本文针对重载机械臂电液伺服系统的特点,建立了考虑Stribeck摩擦模型的重载机械臂俯仰缸电液伺服系统数学模型,设计了基于扩张观测器的自适应鲁棒控制器。将扩张状态观测器和采用反演法设计的自适应鲁棒控制器相融合,对系统中存在的不匹配干扰和未知参数进行估计。利用Lyapunov稳定性理论验证了控制器的稳定性,并在MATLAB仿真中测试了控制器在空载和负载条件下的控制性能。结果表明,和ARC相比,ESOARC具有更好的鲁棒性和跟踪性能,更加适合于重载机械臂上的应用。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
铁道通信信号(2020年4期)2020-09-21
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年8期)2017-12-20
计算技术与自动化(2016年4期)2017-01-11
北京航空航天大学学报(2016年7期)2016-11-16
兵器装备工程学报(2016年5期)2016-06-15
专用汽车(2016年4期)2016-03-01
