
果蝇优化模糊PI控制CLLLC谐振变换器
2022-05-26 13:00刘春喜朱双蕊
制造业自动化 2022年5期
刘春喜,朱双蕊,崔 正
(1.辽宁工程技术大学 电气与控制工程学院,辽宁 125105;2.北京机械工业自动化研究所,北京 100120)
0 引言
CLLLC谐振变换器因具有功率密度高、可双向传输,易于实现软开关等优势,在车载充电机、分布式发电以及燃料电池管理系统等领域获得了广泛应用[1,2]。这些领域对于变换器的动态性能有较高的要求,所以要选取合适的控制策略,以保证系统安全高效运行。
CLLLC谐振变换器通常采用PI控制,但由于系统的非线性和时变性较强,数学模型搭建比较困难,无法精准获取PI控制参数[3]。因此,许多研究学者开始采用智能控制策略,如模糊PI控制[4,5]。文献[4]非隔离高增益DC-DC变换器利用模糊PID控制使其系统在负载变化较大的情况下减小了输出电压的超调量。文献[5]Buck-Boost变换器利用模糊PID控制使其系统在多次扰动下,输出电压仍能跟踪参考电压。但各自都存在一定的缺陷,如神经网络收敛速度慢;模糊PI控制参数选取复杂,若选取不当将导致系统动态响应速度变慢。
果蝇优化算法是一种模拟果蝇觅食行为的群体优化算法,因具有算法实现简单、收敛速度快且全局寻优能力强等优势,在控制参数优化中得到了广泛应用[6,7]。为此,提出了一种果蝇优化模糊PI控制的方法,对模糊PI控制参数进行优化。首先分析了CLLLC谐振变换器的基本工作原理,其次介绍了果蝇算法的具体实现过程,然后针对选取模糊PI控制参数不当导致系统动态响应速度变慢的问题,利用果蝇优化算法对模糊PI控制的量化因子和比例因子进行优化,以降低模糊PI控制对参数选取的敏感性,采用闭环系统的性能指标为果蝇优化算法的适应度函数,算法迭代寻优找到性能指标最小时模糊PI控制参数的最优解,最后通过仿真与模糊PI控制进行分析比较来验证所提方法的有效性。
1 CLLLC谐振变换器
图1为CLLLC谐振变换器主电路拓扑。

图1 变换器主电路拓扑结构
图中Vin和Vo为变换器输入、输出侧直流电压,Ci和Co分别为输入、输出侧的滤波电容。Q1~Q8为主电路的8个开关管,D1~D8为其体二极管;Lm为变压器的励磁电感,变压器变比为n;Lr1和Lr2分别为原边侧和副边侧的谐振电感,Cr1和Cr2分别为原边侧和副边侧的谐振电容。因其正、反向工作时特性一致,故该文只针对其正向进行控制研究。
2 果蝇优化算法
果蝇优化算法是由潘文超博士提出的一种新型的群体智能优化算法,该算法源于对果蝇觅食行为的模拟[8]。果蝇觅食行为的实质就是果蝇从味道浓度小的位置飞向味道浓度大的位置的过程。果蝇优化算法大致分为以下这几个步骤:
Step 1:初始化果蝇群体位置信息,当个体利用嗅觉搜索食物,个体i位置更新为:

式(1)中,KPaxis、KIaxis、KEaxis和KECaxis为果蝇群体初始位置,randomvalue为果蝇个体搜索距离。
Step 2:根据下式得出当前果蝇个体位置的味道浓度值Ssmelli。

式(2)中,Si为果蝇个体味道浓度判定值,fitness表示味道浓度判断函数,其对应到CLLLC谐振变换器闭环系统中即为适应度函数,该文选用时间乘绝对误差准则(ITAE)作为果蝇优化算法的适应度函数,公式如下:

Step 3:找出当前味道浓度最优值bbestSmell以及对应果蝇个体的位置信息,群体中的其他果蝇均利用视觉飞向该位置,进行位置更新,形成新的果蝇种群中心。

经过不断迭代寻优,判断当前味道浓度最优值是否优于前一代味道浓度最优值,并且当前迭代次数是否达到最大迭代次数,是则输出最优参数,否则执行Step 2。
3 基于果蝇优化的模糊PI控制
3.1 模糊PI控制
CLLLC谐振变换器采用PI控制时无法精准地获取其控制参数,因此很难使整个闭环系统具有较好的控制效果。故而引入模糊PI控制,对PI控制参数进行调整,充分发挥模糊PI控制对非线性系统进行快速整定的优点。
图2为模糊PI控制的CLLLC谐振变换器闭环系统结构图。其中,Vref为CLLLC谐振变换器的参考电压,Vo为变换器的实际输出电压,e和ec为变换器闭环系统输出电压实际值与期望值之间的误差和误差变化率。ke、kec为量化因子,kp、ki为比例因子,ΔKp和ΔKi为PI控制器比例和积分参数的修正系数,vgs为开关管的驱动脉冲信号。

图2 系统模糊PI控制结构
模糊PI控制器以CLLLC谐振变换器闭环系统的误差e和误差变化率ec作为模糊PI控制的输入变量,PI控制器比例和积分参数的修正系数ΔKp和ΔKi为输出变量,将输入语言变量e、ec和输出变量ΔKp、ΔKi定义为{NB,NM,NS,Z,PS,PM,PB}这7个模糊子集。从文献[9,10]中总结经验制定模糊规则表,经模糊化、模糊推理和反模糊化,输出参数ΔKp和ΔKi,重新调整电压回路PI参数,修正为[11]:

3.2 果蝇优化模糊PI控制
模糊PI控制在控制参数选取过程中若选取不当将导致系统动态响应速度变慢。为此利用果蝇优化算法对模糊PI控制的量化因子和比例因子进行优化,以改善系统的动态响应速度。
图3为果蝇优化模糊PI控制结构框图。
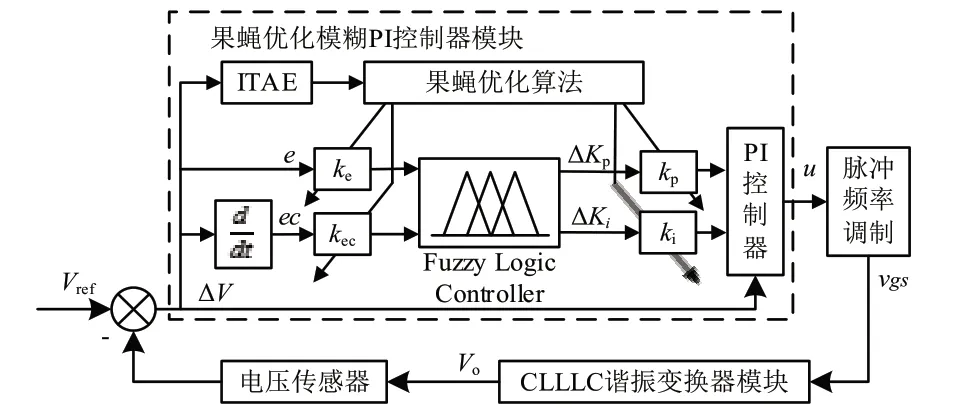
图3 果蝇优化模糊PI控制结构
选取CLLLC谐振变换器闭环系统的性能指标ITAE作为果蝇优化算法的适应度函数J,利用果蝇的寻优能力,根据系统反馈信息对模糊PI控制的量化因子ke、kec和比例因子kp、ki进行全局寻优,当系统的性能指标最小时可得到模糊PI参数ke、kec、kp和ki的最优解,从而提高系统的动态响应速度,其具体流程如图4所示。

图4 果蝇寻优流程
4 仿真实验
为了验证果蝇优化模糊PI控制的CLLLC谐振变换器闭环控制系统具有动态响应速度快等优点,本文分别采用模糊PI控制和果蝇优化模糊PI控制方式,在相同的CLLLC谐振变换器外部参数条件下,在以下三种工况下进行仿真分析:
1)输入电压恒定、负载不变,系统启动;
2)输入电压恒定,改变负载;
3)负载恒定,改变输入电压。
4.1 仿真条件设置
CLLLC谐振变换器主要参数如下:输入侧额定电压为400V,输出侧额定电压为48V,额定功率为1000W,谐振频率为100kHz,开关频率为50kHz~120kHz,其谐振回路参数如表1所示。模糊PI控制的量化因子和比例因子分别为0.1、0.63和0.9、0.09,设置果蝇优化算法的果蝇初始种群数量为30,最大迭代次数为20。

表1 谐振回路参数
4.2 仿真结果及分析
图6为输入电压400V满载启动时两种控制方式作用下的输出电压波形。

图6 系统启动时输出电压波形对比
图中虚线为模糊PI控制方式作用下的输出电压波形,实线为果蝇优化模糊PI控制方式作用下的输出电压波形。可以看出,虚线的输出电压最大值为49.47V,达到稳定状态大概需要1.83ms;而实线输出电压最大值为48.05V,达到稳定状态大概需要0.68ms。由此可见,果蝇优化模糊PI控制方式下系统的超调更小,启动时间更快并且达到稳定状态的时间更短。
图7为系统输入电压400V,0.003s和0.004s处负载调整率分别为-50%和+50%时,两种控制方式下的输出电压。

图7 负载突变动态响应对比
从图中可以看出,当负载突变时,果蝇优化模糊PI控制系统输出电压的动态压降更小,恢复时间也更短。由此可见,果蝇优化模糊PI控制方式下系统的动态响应速度更快。
图8为负载为2.304Ù,0.04s和0.07s处电压调整率分别为-50%和+50%时,两种控制方式下的输出电压。

图8 输入电压波动动态响应对比
从图中可以看出,当输入电压波动时,果蝇优化模糊PI控制系统输出电压的动态压降、超调尖峰更小,恢复时间也更短。由此可见,果蝇优化模糊PI控制方式下系统的动态响应速度更快。
5 结语
本文提出了一种果蝇优化模糊PI控制方法,仿真结果表明,提出的果蝇优化模糊PI控制在CLLLC谐振变换器控制中得到了较好的性能,具体表现如下:
1)在不同工况下,解决了模糊PI控制参数选取不当导致系统动态响应速度变慢的问题。
2)当系统满载启动时,系统的超调量减小了96.59%,达到稳态的时间缩短了62.84%。
3)当负载突变时,系统输出电压的动态压降减小了66.03%,恢复时间缩短了14.79%,动态响应速度更快了;输入电压波动时,系统输出电压的动态压降减小了51.19%,恢复时间缩短了72.14%,系统的动态响应速度更快了。
另外,该方法可用于电力电子其它变换器中,如DC-DC变换器。
猜你喜欢
学苑创造·A版(2022年3期)2022-03-29
烟台果树(2021年2期)2021-07-21
学苑创造·A版(2019年6期)2019-07-11
科技创新与应用(2019年17期)2019-06-09
福建基础教育研究(2019年2期)2019-05-28
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
城市建设理论研究(2014年11期)2014-04-21
科技致富向导(2013年21期)2013-12-10
