
五自由度磁力驱动平台的支承控制建模与试验研究
2022-06-08 07:34周峻宇阎明印孙凤金俊杰王韬宇
轴承 2022年3期
周峻宇,阎明印,孙凤,金俊杰,王韬宇
(沈阳工业大学 机械工程学院,沈阳 110870)
电磁悬浮驱动技术是磁悬浮技术的一种应用,具备响应迅速、无需润滑等优点,常应用于高精度、高速度设备的运动控制[1-2],并在国内外学者的研究中不断发展突破。文献[3]提出了一种同步平面电动机结构,对x,y,z方向3个自由度运动的悬浮力进行了仿真分析。文献[4]设计了一种新型磁悬浮定位平台,其由通电线圈提供平台的悬浮力和垂直方向上的力,降低了控制难度。文献[5]研制了一种六自由度精密定位台,由6组E型电磁铁组成悬浮平台,提高了悬浮平台的控制精度,平动行程可达毫米级,转动行程可达微米级[5-6]。文献[7]介绍了一种六自由度磁悬浮平台,其定位精度可达纳米级且系统鲁棒性好。
本文提出了一种五自由度磁力驱动平台,采用磁悬浮轴承结构形式,通过6组差动电磁铁控制平台五自由度运动[8-9],并建立动力学模型对系统竖直方向3个自由度的运动进行仿真分析和驱动试验。
1 磁力驱动平台结构及工作原理
1.1 磁力驱动平台结构
五自由度磁力驱动平台的结构如图1所示,主要由6组差动电磁铁、上顶盖、下底盖及中间起到连接作用的连接环构成[10-11]。

1—上顶盖;2—磁铁连接块;3—径向电磁铁;4—轴向电磁铁;5—浮动平台;6—下底盖;7—连接环;8—位移传感器。
1.2 磁力驱动平台工作原理
五自由度磁力驱动平台中磁力驱动器电磁铁的水平分布如图2所示:上下端盖上均匀布置4组差动电磁铁(编号1,2,3,4);中间部分的连接环上同样均匀分布着2组差动电磁铁(编号5,6)。控制1~4组差动电磁铁的电流可实现平台在z轴方向的移动;在平台稳定悬浮时,控制1,3组电磁铁可实现平台绕x轴回转运动;控制2,4组电磁铁可实现平台绕y轴回转运动;控制水平方向上的5,6组电磁铁的电流可实现悬浮物沿x轴和y轴移动。

图2 磁力驱动器电磁铁的分布Fig.2 Distribution of electromagnets for magnetic driver
2 控制系统动力学模型
五自由度磁力驱动平台的受力情况如图3所示,取平台稳定悬浮时平衡位置的质心O为坐标系原点并设立绝对坐标系;当平台在平衡位置处运动时,其质心发生了偏移,记为O′并设立相对坐标系。

图3 系统受力分析Fig.3 Force analysis of system
设O点的广义坐标为
O=[XYZαβ]T,
(1)
式中:X,Y,Z为平台平动上的自由度;α,β分别为平台绕x,y轴运动的自由度。
平台在运动时所处的坐标系O′相对于6组电磁铁的坐标可以表示为
O′=[Z1Z2Z3Z4X1X2Y1Y2]T,
(2)
式中:Z1,Z2,Z3,Z4为垂直方向电磁铁的自由度;X1,X2,Y1,Y2为水平方向电磁铁的自由度。
上述2个广义坐标系的变换关系为
(3)
式中:a为磁极到质心的距离。
由于平台有5个自由度的运动,控制系统的总动能由平动动能T1和转动动能T2组成,分别为
(4)
式中:m为平台质量;Jα,Jβ分别为平台绕x,y轴旋转的转动惯量。
建立的拉格朗日方程为
(5)
式中:kx,ky,kz为对应位置电磁铁的位移刚度系数;kixy,kiz为电流刚度系数;i1~i6分别为6组差动电磁铁的控制电流。
状态空间矩阵为

(6)
(7)
C=[(0)5×5(E)5×5],
式中:u为系统的输入,即控制电流;x为系统的状态;y为系统的输出;E为单位矩阵。
3 仿真分析
控制系统的基本参数见表1,PID控制原理如图4所示:输入量xd,yd为x,y方向的平动,实现离轴加工并保证焦点与辅助气体的位置关系;zd为z向平动,负责改变焦点位置;αd,βd为x,y轴的回转运动,实现激光打孔并达到激光振镜的效果[12-13]。
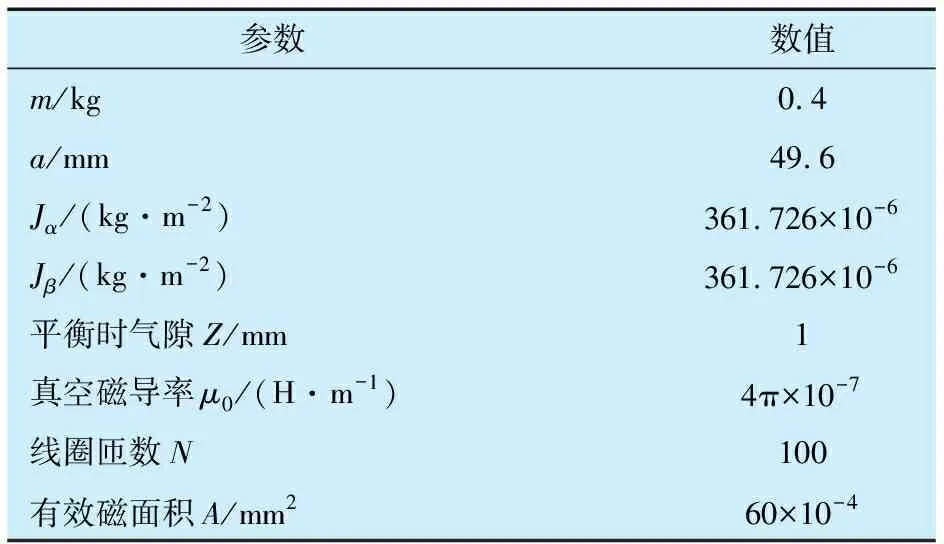
表1 控制系统的基本参数Tab.1 Basic parameters of control system
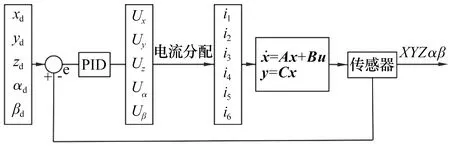
图4 PID控制原理Fig.4 Schematic diagram of PID control
使用Simulink对平台的z向移动、x轴回转和y轴回转进行仿真分析,在0.5 s时给系统z方向一个0.1 mm的连续阶跃信号,给系统x轴回转和y轴回转一个0.005 rad的连续阶跃信号,PID控制参数kP为520,kI为300,kD为3,位移输出情况如图5所示。
由图5可知:PID控制下系统沿z轴移动的响应时间为0.05 s,超调量为90%;系统绕x,y轴回转的响应时间为0.05 s,超调量为75%;在给系统连续阶跃信号情况下,平台能够迅速响应,具有较好的控制效果。
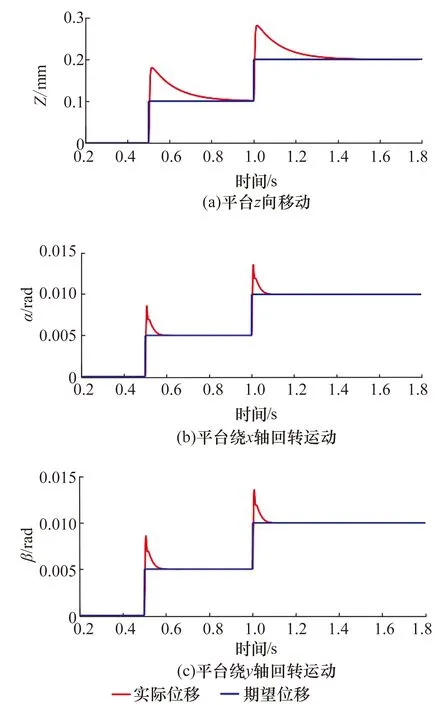
图5 PID控制下系统的位移输出Fig.5 Displacement output of system under PID control
4 五自由度磁力驱动平台样机的搭建
为验证z向移动以及x,y轴回转这3个自由度的驱动特性和理论模型的准确性,搭建五自由度磁力驱动平台进行试验验证。
电磁悬浮驱动器如图6所示,竖直方向的4组轴向差动电磁铁与控制器之间采用中间块连接,2组径向电磁铁则直接与中间连接环连接,通过这6组电磁铁控制悬浮平台实现5个自由度的运动。

图6 五自由度磁力驱动平台样机Fig.6 5-DOF magnetic driving platform prototype
根据五自由度磁力驱动平台工作原理搭建的试验装置如图7所示。dSPACE控制器的电压信号输入范围为0~10 V。电涡流位移传感器的量程为0~2 mm,精度为0.05 mm,输出电压为0~6 V,可检测系统的位置输出。功率放大器电压信号的工作量程为0~10 V,输出电流为0~6 A,可放大输出信号。

图7 五自由度磁力驱动平台试验装置Fig.7 Experimental device of 5-DOF magneticdriving platform
根据驱动平台构建控制系统单元,给悬浮物一个阶跃信号作为期望位移值,电涡流位移传感器检测到位移信号后通过dSPACE进行数模转换并传递给控制器,将反馈值与期望位移的计算偏差作为控制器输出信号,通过dSPACE转换为电压信号并经功率放大器转换为电流信号输入线圈,使悬浮物达到稳定位置:上述过程形成一个闭合回路。通过调试试验装置实现对差动电磁铁的磁力控制,最终分别对z轴平动特性和x,y轴回转特性进行控制试验。
5 磁力驱动平台特性分析
试验中,各参数条件与仿真分析保持一致,在理论基础上调节PD和PID参数并进行磁力驱动平台特性分析,PD控制参数kP为520,kD为3;PID控制参数kP为520,kI为300,kD为3。
5.1 起浮特性
为实现磁力驱动平台5个自由度的运动,应对驱动平台进行起浮试验以验证其能否实现稳定悬浮[14]。向竖直方向上的4组电磁铁输入一个偏置电流使磁力驱动平台有一定的电流刚度,给系统提供一个平衡位置位移信号,竖直方向上端4个电磁铁的电流增大,下端4个电磁铁的电流减小,从而使悬浮物达到平衡位置。
如图8所示,电磁驱动平台在上、下端盖4组电磁铁(Z1,Z2,Z3,Z4)的共同作用下,经过0.20 s的调节时间(PD控制)使平台回到平衡位置。

图8 磁力驱动平台的起浮情况Fig.8 Undulation of magnetic driving platform
5.2 z轴平动特性
系统稳定悬浮时,给系统幅值为0.1 mm的连续阶跃信号, PD和PID控制试验下的z向位移输出曲线如图9所示:PD控制的响应时间为0.10 s,调节时间为0.20 s,超调量为100%,稳态误差为0.05 mm;PID控制的响应时间为0.25 s,调节时间为1.25 s,超调量为120%,稳态误差为0。PD控制的响应时间和调节时间快,但存在稳态误差,悬浮物在z向的移动通过4组差动电磁铁共同控制实现,由图8也可以明显看出4组电磁铁的位移变化不一致,控制精度低。相较于PD控制,PID控制的响应时间慢,但消除了稳态误差,保证4组差动电磁铁与悬浮物间的气隙始终一致,具有较高的控制精度,能够精准确定焦点位置,实现调焦功能。
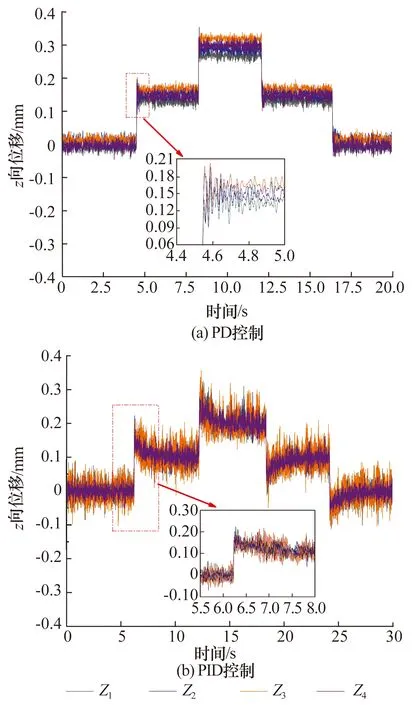
图9 系统的z向平动Fig.9 Translational motion of system along z-axis
5.3 x轴回转特性
系统稳定悬浮时,给系统幅值为0.001 rad的连续阶跃信号,观察系统的位移输出响应情况。PD和PID控制试验下x轴回转情况如图10所示:PD控制的响应时间为0.20 s,调节时间为1.20 s,超调量为70%,稳态误差为0.001 2 rad;PID控制的响应时间为0.30 s,调节时间为1.80 s,超调量为230%,稳态误差为0。在相同试验条件下,PD控制响应快,响应过程中比较稳定,但存在稳态误差;对于PID控制,虽然响应过程中电磁铁气隙波动较大,但由于积分的引入,有效消除了稳态误差,具有较高的控制精度。
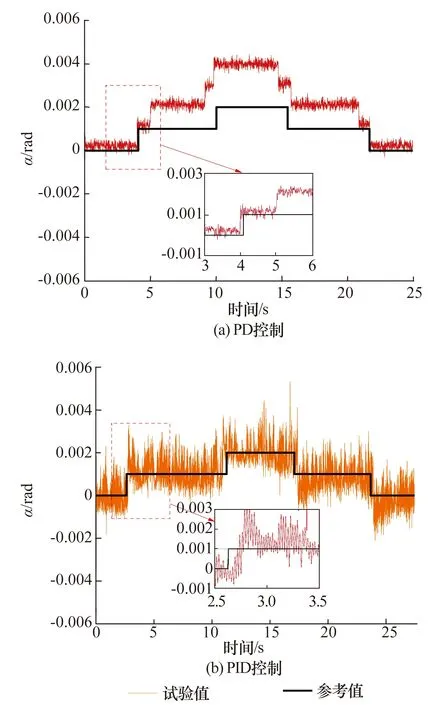
图10 系统绕x轴的回转运动Fig.10 Rotation of system around x-axis
5.4 y轴回转特性
系统稳定悬浮时,给系统幅值为0.001 rad的连续阶跃信号,观察系统的位移输出响应情况。PD和PID控制试验下y轴回转情况如图11所示:PD控制的响应时间为0.20 s,调节时间为1.20 s,超调量为75%,稳态误差为0.07 mm;PID控制的响应时间为0.30 s,调节时间为2.00 s,超调量为80%,稳态误差为0。在相同试验条件下,PD控制的响应时间和调节时间快但存在稳态误差,PID控制消除了稳态误差,具有较好的控制精度,可以精准确定激光打孔位置,达到激光振镜的效果。

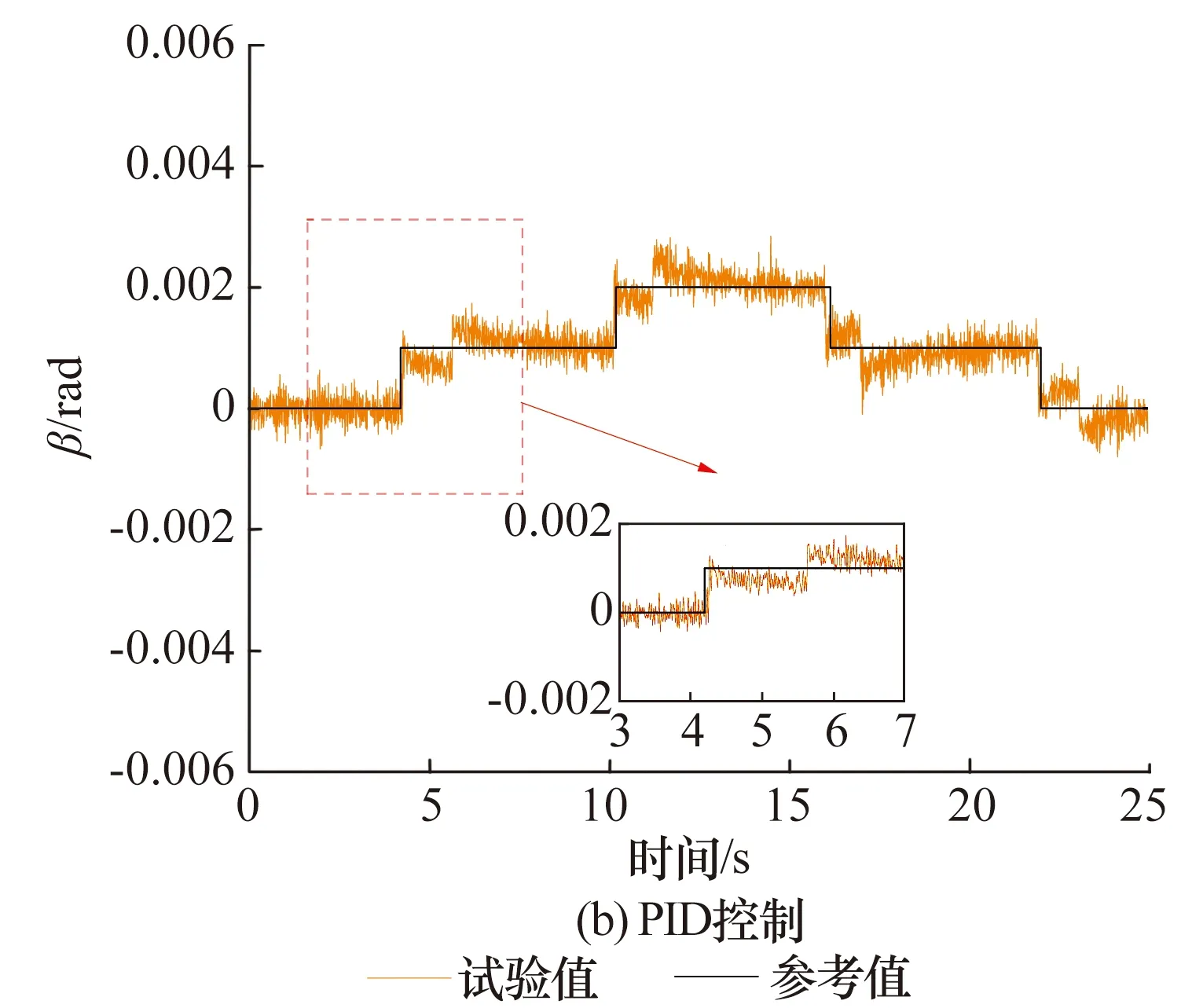
图11 系统绕y轴的回转运动Fig.11 Rotation of system around y-axis
5.5 小结
仿真与试验结果的对比见表2:试验结果的响应时间比仿真结果略长,控制系统存在时滞性;由于悬浮物质量分布不均匀,试验的超调量也比仿真结果大。
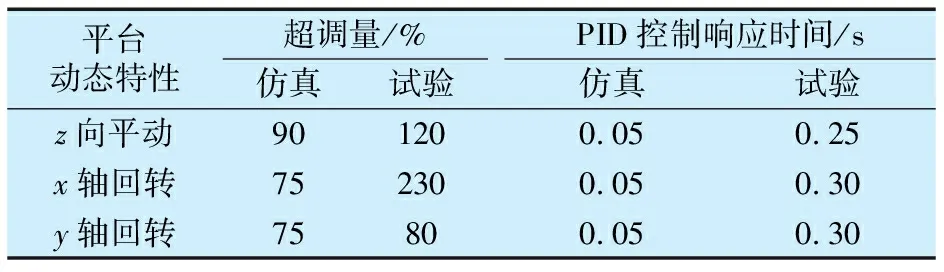
表2 仿真与试验结果的对比Tab.2 Comparison of simulation and experimental results
6 结论
提出了一种五自由度磁悬浮驱动平台,建立动力学模型并使用Simulink进行仿真分析,通过对控制系统的z向平动和x,y轴回转运动的控制试验得出以下结论:
1)五自由度驱动平台能实现稳定悬浮,验证了z向平动和x,y轴回转这3个自由度的驱动特性和理论模型的准确性。
2)相对于PD控制,PID控制应用于五自由度驱动平台能更好地消除稳态误差。
研究成果为激光加工的调焦功能和精密打孔奠定了基础,接下来将进行x,y轴移动试验以实现离轴式激光切割,并使用更高级的算法对控制系统进行验证。
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
电力与能源(2022年4期)2022-10-13
机床与液压(2022年11期)2022-09-15
格言·校园版(2021年22期)2021-09-27
智慧少年·故事叮当(2021年3期)2021-06-29
初中生世界·七年级(2021年12期)2021-01-21
科学导报·科学工程与电力(2019年8期)2019-09-10
学苑创造·B版(2019年8期)2019-08-09
科学与财富(2017年33期)2017-12-19
中学生数理化·中考版(2017年1期)2017-03-29
