
手持式名优茶嫩梢采摘机械手设计与试验优化
2022-06-21 08:20贾江鸣叶玉泽程培林朱赢鹏傅霞萍陈建能
农业机械学报 2022年5期
贾江鸣 叶玉泽 程培林 朱赢鹏 傅霞萍 陈建能
(1.浙江理工大学机械与自动控制学院, 杭州 310018; 2.浙江省种植装备技术重点实验室, 杭州 310018)
0 引言
近年来,我国人口老龄化加重[1-3],导致在较短的采茶期内采茶工缺乏,且采茶工的劳动强度大,劳动成本高,制约茶叶的产量和效益[4-10]。
针对以上问题,国内外学者开展茶叶采摘机械化的研究,以缓解茶叶采摘用工难的现状。文献[11]设计一种剪刀式茶叶采摘机,该采茶机由曲柄滑块机构、弹簧剪和螺纹丝杠等部件组成,具有结构简单、成本低和易维护的优点。文献[12]将茶叶采摘末端执行器安装在Delta并联机械臂末端,设计一种并联式茶叶采摘机器人,借助并联机械臂操作灵活的优点提升机械化茶叶采摘的效率。文献[13]开发一种自走式茶叶采摘机器人,适应多地形、多垄宽的茶叶种植环境。文献[14]模拟人手采茶动作设计一种6自由度拉拔式的茶叶采摘机械臂,虽然该机械臂有运动灵活的优点,但其控制难度较高。以上提出的采茶机器人结构较大,均需安装在自走平台上完成茶叶采摘作业。因此,面对我国茶叶种植区多为坡度较大的丘陵地带,这些茶叶采摘机器人难以大范围推广。
为提升我国丘陵地带茶叶种植区的机械化采摘水平,部分学者对便携式茶叶采摘机进行研究。文献[15-18]依据往复切割收获农作物的原理设计多种便携往复切割式采茶机,这些采茶机由单人或双人操作,可在丘陵地带茶叶种植区进行作业,采茶效率高。但便携往复切割式采茶机以“收割”的方式采摘茶叶,只适合经济效益较低的大宗茶采摘,难以对品相(长短、大小、完整度等)要求较高的名优茶进行采摘。针对名优茶的采摘,文献[19]在研究茶叶形状的基础上设计一种名优茶剪切采摘机械手,但在剪切过程中,茶叶组织细胞破裂,细胞液中茶多酚成分与空气氧化形成黑色物质,茶叶断口呈现黑色,降低了名优茶的经济效益。
为了实现丘陵山区名优茶的低损采摘,减少茶农劳动强度,本文模拟人手采摘茶叶的方式,设计一种手持式名优茶嫩梢采摘机械手。采用三因素三水平的Box-Behnken响应面分析方法研究各因素对采摘成功率的交互影响,运用Design-Expert 11.0软件对该机械手的工作参数进行二次回归模型优化,最后进行试验验证。
1 采茶机械手设计
1.1 采茶机械手整体设计
目前最好的名优茶采摘工艺仍为手工采摘,手工采摘的名优茶具有质量高、品相好的优点[20-22]。采茶过程中,拇指和食指夹紧茶梗,折弯提拉后使其断裂,对芽叶没有损伤,能够保持名优茶的品相和经济效益。本文模拟图1所示的手工采摘茶叶的动作设计手持式名优茶嫩梢采摘机械手,对手工采茶动作分解如下:①如图1a所示,拇指和食指张开一定距离,运动到茶叶上方并夹紧茶梗,此时夹紧位置为断梗位置。②如图1b所示,逆时针转动手腕,被夹紧的茶梗跟随手指转动,茶梗被折弯。③如图1c所示,折弯茶梗后,手臂向上拉动迫使茶梗在夹紧点断裂。④如图1d所示,将断裂的茶叶放至随身携带的茶叶采收筐中,完成茶叶采摘过程。

图1 手工采茶过程动作分解Fig.1 Decomposition of actions of manual tea picking
模仿图1所示的手工采茶动作,设计如图2所示的手持式名优茶嫩梢采摘机械手。该机械手由送料机构、采摘机构和舵机组成。舵机驱动采摘机构完成茶叶采摘,如图3所示,主要由主动手指、从动手指、柔性夹紧块、对射光电开关、一对相互吸合的磁钢和磁钢安装板构成。其中,主动手指和从动手指相对安装,从动手指下端设置有弧形凹槽,与弧形凹槽对应的柔性夹紧块固定在主动手指下端,在两手指夹紧状态下柔性夹紧块与弧形凹槽贴合,柔性夹紧块由与人手指硬度相近的硅胶材料制成;对射光电开关分别安装在主动手指和从动手指中部,以点射光源是否被遮挡来检测待采区是否有茶叶;一对相互吸合的磁钢分别安装在磁钢安装板和从动手指上,以磁钢的吸合力作为茶梗的拉断力。

图2 采茶机械手结构示意图Fig.2 Schematics of tea picking manipulator1.送料机构 2.对射光电开关 3.采摘机构 4.舵机
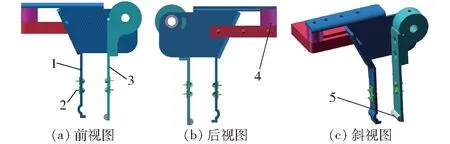
图3 采摘机构图Fig.3 Picking mechanism diagrams1.从动手指 2.对射光电开关 3.主动手指 4.磁钢 5.柔性夹紧块
1.2 采茶机械手工作原理
如图4所示,手持式名优茶嫩梢采摘机械手模拟人工采茶的动作采摘茶叶,主要包括采摘检测、柔性夹紧和折弯、提拉断梗和送料3个动作:①图4a、4b所示为采摘检测,机械手放置在茶叶上方,对射光电开关检测待采区是否有茶叶。机械手上下移动过程中,若待采区有茶叶,触发光电开关,舵机驱动采摘机构采摘茶叶。②图4c所示为柔性夹紧和折弯,舵机带动主动手指沿顺时针转动,柔性夹紧块将茶梗夹紧在从动手指下端的弧形凹槽内,同时被夹紧的茶梗在弧形凹槽内被折弯。③图4d、4e所示为提拉断梗和送料,茶梗被夹紧并折弯后,舵机带动主动手指继续沿顺时针转动,主动手指推动从动手指随动,安装在磁钢安装板和从动手指左端的一对磁钢从相互吸合的状态分离,茶梗被拉断。主动手指和从动手指继续沿顺时针转动,茶叶被送至采收盒内,完成茶叶采摘动作。如图4f所示,完成茶叶采摘后,舵机驱动主动手指和从动手指沿逆时针旋转回复到初始位置,并准备继续执行下一次采摘动作。

图4 茶叶采摘过程Fig.4 Tea picking process
2 茶叶采摘影响因素确定与实现
通过对图4所示手持式名优茶嫩梢采摘机械手采茶动作的分析,确定影响该机械手采茶成功率的因素主要为磁钢安装点与主动手指旋转轴的距离(磁钢距离)、主动手指角速度和主动手指转角。
2.1 磁钢距离
为了控制主动手指与从动手指之间的夹紧力,根据手持式名优茶嫩梢采摘机械手模拟人工采茶的动作分析可知,主动手指在转动过程中克服一对磁钢的吸合力而拉断茶梗。图5a为拉断茶梗过程中的运动分析,对从动手指关于旋转轴的力矩平衡有
FMlM-FNlN=0
(1)
式中FM——磁钢吸合力,测得为4.16 N
lM——磁钢安装点到主动手指旋转轴距离
FN——柔性夹紧块对茶梗挤压力
lN——夹紧点到主动手指旋转轴垂直距离,为58 mm
若茶梗断裂,则有
μFN=FB≥Fb
(2)
式中μ——柔性夹紧块与茶梗的摩擦因数,为1.3
FB——柔性夹紧块与茶梗之间摩擦力
Fb——茶梗拉断力

图5 采摘机构运动分析Fig.5 Motion analysis diagrams of picking mechanism
为计算磁钢安装点到主动手指旋转轴的距离lM,需对茶梗拉断力Fb进行测量。如图6a所示,使用单轴拉伸试验机(QT-6203S型,苏州谦通仪器设备有限公司)测量茶梗的拉断力Fb。试验对象为在杭州茶叶研究所内采摘的带梗茶叶(龙井43),拉伸数量为200根新鲜茶梗。为避免夹持器对茶叶的夹持损伤,在茶梗两端的夹持位置包裹一层硅橡胶,拉伸速度均为0.1 mm/s。试验结果如图6b所示,200根茶梗的拉断力呈正态分布,最大拉断力为3.6 N。将最大拉断力代入式(1)、(2)可得磁钢安装点到主动手指旋转轴的距离lM≥38.61 mm,lM的最小值取为40 mm。由预试验可知,当lM大于58 mm时,茶梗会因柔性夹紧块的挤压力过大而损坏。因此,磁钢安装点到主动手指旋转轴的可行距离(磁钢距离)范围为40 mm≤lM≤58 mm。

图6 茶梗拉伸试验与拉断力统计Fig.6 Tensile test and breaking force statistics of tea stem
2.2 主动手指角速度
主动手指的角速度越大,采茶机械手的工作效率越高。主动手指角速度由舵机的角速度决定,受限于舵机性能,主动手指角速度ω最大为3.39 rad/s。由预试验可知,当主动手指的角速度ω小于2.62 rad/s时,茶叶易从两手指的侧面空隙掉落,降低采茶成功率。因此,机械手主动手指的可行角速度范围为2.62 rad/s≤ω≤3.39 rad/s。
2.3 主动手指转角
主动手指的转角决定了茶叶是否能够从两手指末端掉落进茶叶采收盒,从而影响该机械手的采茶成功率。图5b所示为茶叶从两手指末端掉落进茶叶采收盒的临界状态,主动手指的转角为θ,茶叶在两手指之间的待采区内的运动路线呈抛物线。若主动手指的转角过小时,茶叶的落点仍在主动手指上,且手指回转复位的速度较快,导致茶叶较难进入采收盒,降低采茶成功率。在图5b所示状态下,忽略茶叶掉落过程中的空气阻力,则其在竖直方向和水平方向的位移为
(3)
Rcosαsinθ=v0tcosθ
(4)
式中R——主动手指末端转动半径
α——主动手指末端到轴心的连线与主动手指平面之间的夹角
v0——主动手指末端线速度
t——茶叶从抛出到进入茶叶采收盒的时动手指末端线速度v0与主动手指角速度ω的关系为
v0=ωR
(5)
式中,受限于手持采摘机械手的尺寸R=62.5 mm,主动手指的最大角速度为ω=3.39 rad/s。将以上参数代入式(3)~(5),可得临界状态下θ=140°。由于转角θ>170°时,从动手指与茶叶收集盒发生干涉,因此可行的转角范围为140°≤θ<170°。
3 影响因素试验优化
3.1 试验设计
对该机械手进行三因素三水平Box-Behnken茶叶采摘试验,试验因素编码如表1。

表1 试验因素编码Tab.1 Experimental factors
3.2 试验指标
以手持式名优茶嫩梢采摘机械手的采摘成功率为试验指标,其计算公式为
(6)
式中Nt——采摘茶叶总数
Ns——成功落入茶叶采收盒的茶叶数量
3.3 试验方案与结果
使用手持式名优茶嫩梢采摘机械手样机在杭州茶叶研究所进行名优茶(龙井43)采摘试验。该试验采用三因素三水平的Box-Behnken试验,共进行17组。每组试验采摘茶叶总数为100个,并统计成功采摘的名优茶数量,代入式(6)计算采摘成功率。为减小测量误差,每组试验进行3次取平均值,试验结果见表2。

表2 试验方案与结果Tab.2 Experiment design and results
3.4 结果分析
3.4.1回归模型建立与检验
利用Design-Expert软件对试验所得的数据进行分析处理得到采摘成功率的回归模型,方差分析见表3(A、B、C为因素编码值),采摘成功率φ的回归模型P<0.05,表明该模型显著;模型的决定系数R2为0.883,表明该模型可以解释88.3%以上响应值变化,预测值与实际值之间具有高度的相关性,试验误差较小。其中A、C、AB对采摘成功率φ影响显著,BC对采摘成功率φ影响极显著,说明磁钢距离、主动手指角速度和主动手指转角对茶叶采摘成功率存在交互影响。因此采用多元回归拟合的方式对试验结果进行处理,得到磁钢距离、主动手指角速度和主动手指转角对采摘成功率φ影响的回归方程为
φ=40.80+6.62A-3.13B-6.25C+9.25AB-
6.00AC+13.50BC+7.98A2+6.48B2+7.22C2
(7)

表3 采摘成功率方差分析Tab.3 Variance analysis of picking success rate
根据模型方差的分析知主动手指转角对采摘成功率影响不显著,原因是两手指在夹紧茶叶后形成一个几乎封闭的通道,尽管主动手指转角对茶叶掉落有影响,但不显著。
3.4.2交互因素对试验指标影响分析
Design-Expert 11.0软件分析表明,主动手指角速度、主动手指转角和磁钢距离存在交互影响,需要进一步深入的分析各因素对采摘成功率的影响。为了直观了解各交互因素对试验指标的影响,忽略不显著的交互影响因素,通过Design-Expert 11.0软件得到交互因素对采摘成功率影响的响应面图,如图7所示。

图7 因素交互作用对成功率的响应曲面Fig.7 Response surfaces of factor interacting on success rate
图7a为磁钢距离位于中心水平(49 mm)时,主动手指角速度与转角对茶叶采摘成功率交互影响的响应面图。当主动手指角速度较低时,随着转角的减小采摘成功率有所提升,原因是茶叶刚拉断时具有较大的速度,易从两手指间掉落到收集盒,如转角增大反而不易掉落到收集盒。当转角较大时,随着角速度的增大采摘成功率增大,原因是较大的角速度带动茶叶具有较大的切向速度,有效提高采摘成功率。
图7b为主动手指角速度位于中心水平(3.00 rad/s)时,磁钢距离与主动手指转角影响采摘成功率的响应面图。当主动手指转角较小时,磁钢距离越小,茶叶采摘的成功率越大,原因是若磁钢距离太大,手指转动所需的力矩过大,茶叶具有过大的运动速度,易从两指缝中甩出,不能掉落到收集盒。
3.4.3参数优化与试验验证
茶叶采摘成功率是衡量采茶机械手作业效果的重要指标,运用Design-Expert 11软件中Optimization功能,以采摘成功率最大为目标函数,对各参数进行优化得最优参数为:lM=40.038 mm,θ=152.994°,ω=3.379 rad/s,采摘成功率φ=75.43%。受限于加工精度将上述优化后的参数近似处理并进行采摘试验,其中磁钢距离lM=40.04 mm、主动手指转角θ=153.0°、主动手指角速度ω=3.38 rad/s。试验重复3次,试验结果分别为72%、74%、77%。试验现场作业与采摘过程分别见图8、9。采摘成功率的相对误差小于5%,表明响应面仿真试验能够有效实现优化。由于采摘过程中有很多不可控的因素,如茶叶嫩梢的生长姿态不同;采摘点不断变化;采摘过程中,茶叶采摘点和采摘角度在自然环境下会随机变动,因此采摘成功率有待进一步提高。在3次采摘试验中,采摘时间均为10 min,对每次试验采摘的嫩梢个数进行统计并计算采摘速度为25.4、26.2、24.0个/min,3次采摘平均速度为25.2个/min。整机质量209 g,可进行长时间作业,有效降低了手工采茶劳动强度。

图8 现场作业Fig.8 Field operation

图9 采摘过程Fig.9 Tea picking process
4 结论
(1)设计了一种模拟人手采摘茶叶的手持式名优茶嫩梢采摘机械手,通过初步试验和理论计算确定了影响该机械手采摘成功率的影响因素。
(2)运用Design-Expert 11.0软件进行了三因素三水平的Box-Behnken试验,确定了各因素对采摘成功的影响由大到小为:主动手指角速度、磁钢距离、主动手指转角。
(3)运用Design-Expert 11.0软件,以采摘成功率最高为优化目标,确定优化参数为磁钢距离lM=40.04 mm、主动手指转角θ=153.0°、主动手指角速度ω=3.38 rad/s。现场采摘试验表明,以优化后参数实现的采摘机械手3次试验的平均采摘速度为25.2个/min,采摘成功率为74.3%,试验值与预测值的误差小于5%。
猜你喜欢
林业科技(2022年2期)2022-04-27
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
学校教育研究(2019年19期)2019-11-23
计算机与网络(2019年10期)2019-09-10
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中学课程辅导·教师通讯(2018年10期)2018-09-04
中国建筑金属结构(2018年4期)2018-05-23
中学生数理化·高一版(2017年3期)2017-07-08
少年科学(2015年8期)2015-08-13
