
具有驱动容错性的冗余并联机构构型综合
2022-06-21 08:31单彦霞苏开兴高雪原李仕华
农业机械学报 2022年5期
单彦霞 苏开兴 高雪原 李仕华
(1.燕山大学机械工程学院, 秦皇岛 066004; 2.燕山大学里仁学院, 秦皇岛 066004;3.燕山大学河北省并联机器人与机电系统实验室, 秦皇岛 066004)
0 引言
并联机构动平台的运动依赖于所有分支的共同驱动,若并联机构某一分支的驱动出现故障,机构动平台的运动会出现失准、失控或失灵问题[1]。在机构学中,驱动容错指机构在运行过程中驱动器发生故障,仍然能完成预定工作任务,并维持其性能不变或变化很小。因此,研究并联机构的驱动容错问题对减少驱动故障造成的工程损失具有重要意义。
20世纪80年代末,MACIEJEWSKI[2]研究了串联机器人的可靠性与冗余容错问题。MONTEVERDE等[3]提出了将四层次(关节、链路、子系统与系统)容错方法应用于串并联机器人。李波[4]针对冗余驱动航天器执行机构的故障,设计了2种姿态容错控制方案。文献[5-6]研究串联机构的驱动故障容错问题时,在梯度投影法中引入了加权最小范数法优化容错轨迹规划算法,并针对串联机构提出了综合关节可操作度的容错能力评价指标。缪萍等[7]针对自由摆动类故障(其实质是驱动力失效或关节约束失效)提出一种通过优化运动轨迹规划实现驱动容错的方法,并研究了驱动容错过程中驱动关节速度突变的影响因素。闫彩霞等[8]基于故障隔离的思想分别研究了冗余并联机构的驱动器故障和非驱动关节故障对机构动力学性能的影响,并利用结构冗余和力矩再分配方法实现了冗余并联机构的故障容错。潘阳[9]针对一种双并联结构的6足并联机器人,采用优化设计的驱动控制策略,研究了在锁死故障和不可控故障下该机器人的驱动故障容错性能。YAO等[10]研究了一种基于冗余自由度的并联机构驱动容错控制策略及对应的机构工作空间边缘识测方法,并对大重型副反射镜调节并联机构进行了研究,有效提高了机构的工作可靠性和驱动容错性。QU等[11]研究了一种三平移4-UPU冗余并联机构驱动力失效问题,该机构在任一分支驱动力失效时机构移动能力不受影响,有较好驱动力失效容错性。YI等[12]研究了3种关节失效类型对并联机构运动学性能的影响,提出了一种利用工作空间和运动冗余的机构容错方法。
综上所述,关于并联机构驱动容错的研究主要集中在控制策略方面,也有通过结构冗余提高某一具体机构的驱动容错性。但是,只是针对具体机构的研究,这类机构还不够丰富,缺少具有驱动容错性的冗余并联机构构型综合方法。本文提出一种针对分支驱动力失效故障的具有驱动力失效容错性的冗余并联机构构型综合方法,综合出多种该类型的并联机构,以期为具有驱动容错性并联机构的应用奠定理论基础。
1 驱动失效度评价指标
1.1 约束空间和驱动空间
并联机构约束空间SCw为机构动平台所受到的各约束力螺旋组成的螺旋系,可求解机构自由度空间的反螺旋得到,即
(1)
机构驱动空间SAw指机构的一组驱动力螺旋组成的螺旋系,用于描述机构所受到的驱动力,即
SAw={$A1w,$A2w,…,$Anw}
(2)
一般情况下,并联机构驱动空间SAw的维数与自由度相等。若冗余并联机构的驱动空间和约束空间线性无关,则机构所选驱动空间合理,称之为“驱动合理判据”[13-14]。冗余并联机构的自由度和约束度(约束空间的秩)之和仍为6。因此,当驱动力失效故障不影响机构约束性质时,只需维持机构驱动空间和约束空间的秩和为6的关系不变,可有效降低驱动力失效对机构运行的影响,即机构具有驱动力失效容错性。
1.2 可操作性失效度指标
雅可比矩阵由驱动空间和约束空间组成。设支链型冗余并联机构的自由度为n,分支数为q,每个分支上有且仅有1个驱动副,机构雅可比矩阵可表示为

(3)


雅可比矩阵与其共轭转置矩阵积行列式的平方根为可操作性指标ω,计算式为
(4)
式中λi——雅可比矩阵的正特征值
为了量化分析驱动力失效对机构可操作性能的影响,基于雅可比矩阵,机构的可操作性失效度指标(Operability invalidity index,OII)为机构在相同空间位置或者姿态下,并联机构分支i驱动力失效后可操作性变化量与失效前的可操作性之比,其表达式为
(5)
式中ζi——机构当前瞬时位姿下的可操作性失效度
ωJ——机构所有分支驱动正常时的可操作性

由式(5)可知,ζ越大机构在该位姿下的可操作性越差。
同时,为了准确评价力矩阵和力矩矩阵受驱动力失效的影响,式(5)还可以表示为
(6)


为了进一步衡量并联机构在整个工作空间内的可操作性受驱动力失效的影响程度,定义全域可操作性失效度指标(Global operability invalidity index,GOII),表达式为
(7)


2 构型综合方法
2.1 驱动同一性条件
从驱动力螺旋的角度分析,若并联机构在结构上具有一定驱动容错性,则当机构中任一分支发生驱动力失效故障时,机构仍然能完成工作任务[15-17]。为了满足“任一分支”的条件,机构分支的驱动力螺旋应具有“同一性”,即:冗余并联机构的驱动力螺旋在固定坐标系下的表达为同一形式,且驱动空间线性无关数等于自由度,则去掉任一驱动力螺旋(驱动力失效故障)时,其驱动空间不会降秩,驱动空间具有驱动容错性。
驱动“同一性”条件,是判断机构是否具有驱动容错性的一个充分必要条件。利用驱动空间的“同一性”条件既可以判断机构是否具有驱动容错性,也可以进行机构综合,进而得到一类具有驱动容错性的并联机构。
2.2 构型综合方法
基于驱动“同一性”条件,以满足驱动力螺旋可互相替补为核心,具有驱动容错性的冗余并联机构构型综合的基本流程如图1所示,具体步骤为:
(1)确定机构自由度F、冗余驱动分支数目m和机构运动方式。
(2)确定机构自由度空间,得到机构单位自由度螺旋系St,并通过螺旋理论求得机构单位约束空间SCw。
(3)根据驱动合理判据,求解单位约束空间正交补,得到机构单位约束正交补空间SDw。对单位约束正交补空间进行扩展,得到能满足驱动“同一性”条件的初始单位驱动力螺旋,并得到对应的初始驱动力螺旋组合$Aiw表达式。
(4)基于得到的初始驱动力螺旋组合,选择对应的运动副,并从中确定驱动副。得到具体的驱动力螺旋,组成初始的驱动空间S′Aw。
(5)对初始的驱动空间进行扩展:根据冗余驱动分支数,添加满足“同一性”条件的驱动力螺旋,得到可针对驱动力失效的具有驱动容错性的驱动空间SARw。
(7)利用并联机构自由度的修正G-K公式,根据预设的自由度n、分支运动副数等,计算分支自由度ki和运动副数gi以及过约束数ν之间的关系,确定在不同分支自由度数目下,机构的过约束数ν。
(8)根据机构的自由度要求,以及螺旋之间的相关性,对分支的运动副进行布置得到具体的机构,并使其满足步骤(7)中得到的过约束数和分支自由度。
(9)应用螺旋理论综合出的并联机构具有运动瞬时性,因此对机构的过约束数和分支自由度进行全周性分析。
(10)利用提出的可操作性失效度指标对综合得到的机构进行分析,并优化机构。

图1 构型综合流程图Fig.1 Process of type synthesis
根据该类机构的综合方法,可对不同自由度的具有驱动力失效容错性的冗余并联机构进行分析与综合。
3 具有驱动容错性的三转动冗余并联机构构型综合
三转动并联机构在医疗康复和空间指向等领域应用较为广泛,其自由度均为转动,容易满足驱动同一性条件[18-19]。以任意1个分支驱动力失效容错的4分支三转动类型并联机构综合为例,根据提出的机构综合方法,其构型综合过程如下:
(1)设机构自由度为3,取分支数目q为4,机构进行球面转动,并且动平台绕定点转动。
(2)由设定自由度得到单位自由度空间为
(8)
求反螺旋得到单位约束空间为
(9)
(3)机构约束为3个约束力,限制机构的3个移动自由度。根据驱动合理判据,计算单位约束空间的正交补,得到机构约束正交补空间为
(10)
(4)确定运动副应为R副、U副或S副,并选择其中与定平台相连的R副为驱动副。
(5)对式(10)驱动力螺旋添加冗余驱动螺旋,得到具有驱动容错性的驱动空间为
(11)
其中
(6)由式(11)驱动空间得到机构约束空间为
(12)
由式(12)可知,机构约束力螺旋为空间汇交于一点的3个约束力线矢,限制机构的移动自由度。
机构运动副全部为R副时,R副对动平台的驱动力螺旋为力偶,力偶方向可根据R副轴线方向确定。为了满足驱动同一性条件,R副的轴线应汇交于一点,保证驱动失效时的“可替性”。
(7)自由度分析。由G-K自由度公式可得

(13)
得到的分支组合存在5种情况,如表1所示。为避免累述,以第1种情况为例进行详细描述。

表1 分支运动副布置情况Tab.1 Layout of branch joints
当分支数为4且分支结构相同,设分支自由度为3,即分支有3个R副。根据前述分析,机构有12个约束力,约束了3个移动自由度,存在9个过约束。由线几何判据,空间汇交于一点的约束力,其线性无关度为3。为保证同一性,该点到各个R副的距离应相等,相应地有以下3种方案:
(1) R副轴线汇交于定、动平台中心点连线的中点,该点到各个R副的距离一致,记为Ⅰ型,如图2a所示。
(2) R副轴线汇交于定平台中心,但4个分支的布置为空间分散布置,记为Ⅱ型,如图2b所示。
(3) R副轴线汇交于动定平台之外的某定点,记为Ⅲ型,如图2c所示。

图2 R副布置方案Fig.2 Arrangements of rotating pairs
当分支存在U副时,分支过约束要求为9,此时无论如何布置都不能使得机构的过约束满足条件,因此情况1时分支无U副。
分析可知,不能满足自由度条件的情况为:① 分支中含有2个及以上U副。② 分支的过约束度小于0。③ 分支运动副数最多与最少的差值超过2。
对所有满足自由度性质的分支进行排列组合并进行全周性分析,即分支自由度性质不会随着机构的运动而发生变换。可综合得满足布置要求(约束螺旋汇交一点)的机构有39种,如表2所示。部分机构结构简图如图3所示。
由表2可知,综合出的分支构型组合只有5种完全对称,其驱动容错性也最理想,选择(4-RRR)Ⅰ冗余并联机构作为实例进行驱动容错性分析。
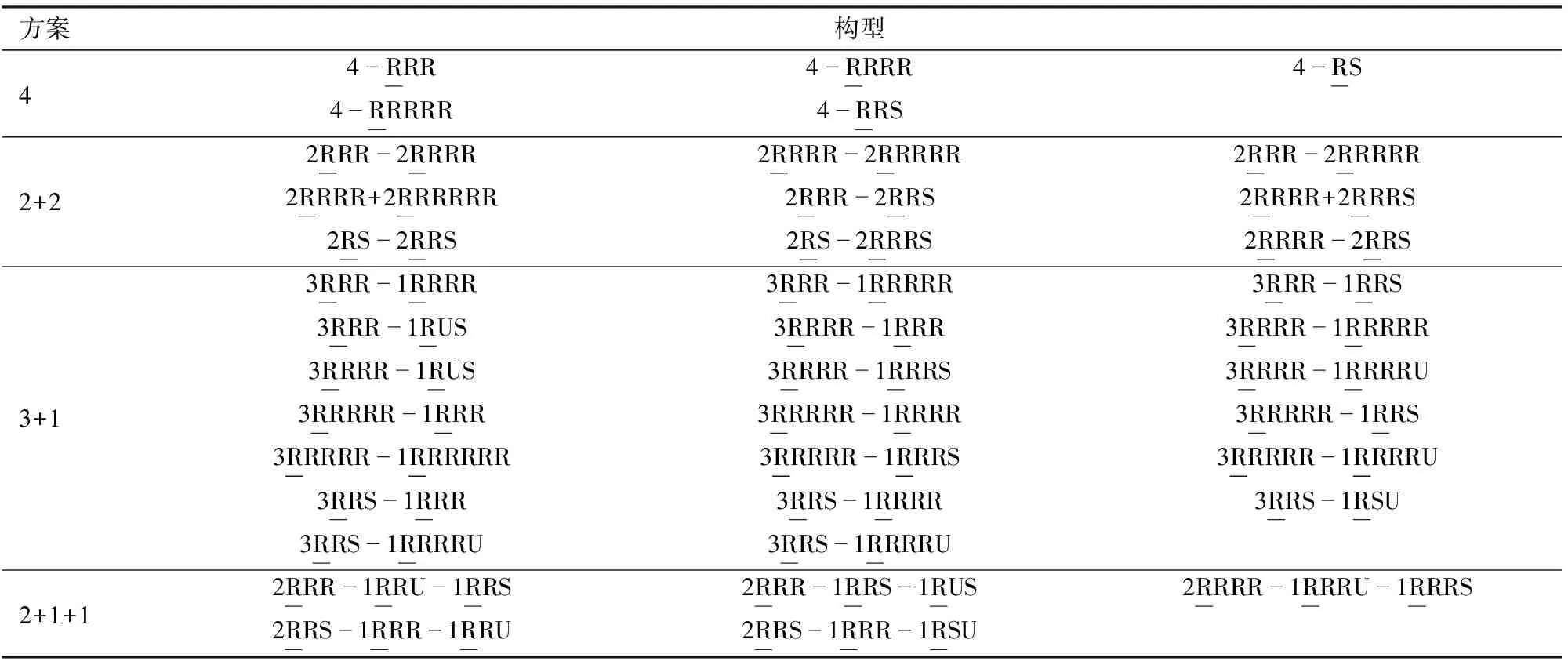
表2 具有驱动容错性的三转动冗余并联机构Tab.2 3R DOF redundant PMs with actuation fault tolerance

图3 综合得到的部分冗余并联机构结构简图Fig.3 Synthesized partial redundant PMs
4 (4-RRR)Ⅰ机构驱动容错性分析
4.1 运动学分析
(4-RRR)Ⅰ冗余并联机构由2个大小不等的圆形平台以及4个完全相同的RRR分支构成。所有R副的轴线汇交于动定平台中心点连线的中点处;以与定平台相连的4个R副为驱动副;每个分支的3个R副的中心点依次标记为Ai、Bi、Ci(i=1,2,3)。(4-RRR)Ⅰ机构三维模型和建立的基坐标系OXYZ、动坐标系OpXpYpZp如图4所示。

图4 (4-RRR)Ⅰ冗余并联机构Fig.4 (4-RRR)Ⅰ redundant PM
定平台中心点为OA,设OOA和OOp长度分别为rA、rp。设与定平台相连的R副轴线与定平台平面夹角为φR,与动平台相连的R副轴线与动平台平面夹角为φr;分支各杆件半径为RL、杆弧度为φL,动、定平台半径为r、R。
为防止机构奇异位形,动定平台形状相同但半径不同,设机构参数之间的关系如表3所示。

表3 (4-RRR)Ⅰ冗余并联机构结构参数关系Tab.3 Structural parameters of (4-RRR)Ⅰ redundant PM
由机构位置可知,各分支的点Bi2与Ai1、Ci3之间存在几何关系:lOAi1与lOBi2垂直,lOCi3与lOBi2垂直。
各分支第1个R副在基坐标系下单位运动螺旋为
(14)
各分支第2个R副在基坐标系下的单位运动螺旋为
(15)
其中
式中li2、mi2、ni2——各个分支中间R副轴线方向单位向量
各分支第3个R副在基坐标系下的单位运动螺旋为
(16)
其中
式中li3、mi3、ni3——各个分支与动平台相连的R副轴线方向单位向量
求反螺旋易得该机构在基坐标系下的单位约束空间为
(17)
设机构动平台的3个姿态角为α、β、γ,利用Z-Y-X描述,得到机构姿态矩阵TO为
TO=rot(γ,z)rot(β,y)rot(α,x)=

(18)
式中s表示正弦函数,c表示余弦函数。
根据选定的驱动副,即与定平台相连的R副为驱动副,求得机构单位驱动空间为
(19)
其中
式中li、mi、ni——各分支驱动力单位方向向量
各分支的单位驱动力力螺旋为同时垂直于lOBi与lOCi方向的单位力偶。
设分支的输入值为θi(i=1,2,3,4),进而结合机构的单位驱动螺旋系和单位约束螺旋系得到机构的雅可比矩阵为
(20)
4.2 驱动容错性分析
由式(20)可知,当机构任一驱动力螺旋失效时,机构雅可比矩阵秩恒定不变。即机构自由度不发生变化,机构可正常工作。
根据1.2节可操作性失效度指标的定义,利用雅可比矩阵,由式(6)计算得到机构的可操作性失效度图谱,即FOII图谱和MOII图谱,分别如图5、6所示。

图5 FOII图谱Fig.5 FOII atlas
由图5可知,(4-RRR)Ⅰ机构的FOII在单分支驱动力失效后无变化。机构的MOII在个别位置变化较大,这与该位置姿态角和R副轴线角度有关。该MOII图谱表明单个分支的驱动力失效对机构动平台的可操作性影响较小。

图6 MOII图谱Fig.6 MOII atlas
(4-RRR)Ⅰ机构的GOII为22.628 3%,以OII和GOII不高于30%为具有驱动容错性的标准[20],(4-RRR)Ⅰ机构具有驱动容错性。但是,(4-RRR)Ⅰ机构在某些位置下的MOII起伏较大,整体性能较差,可优化R副轴线角度、机构转动中心点位置,连杆弧度等结构以进一步提高机构性能。
5 结论
(1)针对驱动力失效故障,提出了一种具有驱动容错性的冗余并联机构构型综合方法。
(2)从理论上解释了机构如何针对驱动力失效进行容错的条件,即驱动“同一性”条件。
(3)利用提出的构型综合方法综合了一类三转动冗余并联机构,得到了39种构型。
(4)通过评价综合出的(4-RRR)Ⅰ机构的驱动容错性,验证了所综合出的冗余并联机构针对驱动力失效具有驱动容错性。
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
计算机系统应用(2021年10期)2022-01-06
商用汽车(2021年12期)2021-07-14
上海师范大学学报·自然科学版(2018年3期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
智富时代(2017年7期)2017-09-05
智富时代(2017年7期)2017-09-05
商业经济(2016年3期)2016-12-23
科教导刊·电子版(2016年20期)2016-10-20
疯狂英语·口语版(2013年1期)2013-01-31
