基于车头时距均衡的多线路公交信号优先控制方法研究
2022-06-24 07:22陈振武王晋云罗佳晨
科学技术创新 2022年18期
陈振武 邹 莉 周 勇 王晋云 罗佳晨
(深圳城市交通规划设计研究中心,广东 深圳 518057)
1 概述
城市公共交通具有集约高效、节能环保等优点,优先发展公共交通是构建资源节约型、环境友好型社会的战略选择。可靠性对于提高公交服务水平、增强公交吸引力具有重要意义,而公交运行过程中,车头时距的均衡性是衡量可靠性的关键指标。公交车车头时距不均衡,严重时会发生“串车”现象,即同一公交线路的前后两辆或多辆车同时到达公交站点,会导致乘客的平均候车时间增加,以及车辆载客量的不均衡,公交服务水平急剧下降。公交车“串车”是一个很难避免的现象,一旦有一辆公交车因为各种随机因素行驶滞后,那么站点会聚集更多的乘客等候,乘客上下车会耗费更多的时间,总的行程时间增加,而这辆车后面的公交车,会由于站点乘客的减少而总的行程时间减少,因而引发“串车”[1]。
公交驻站时间控制是公交车头时距的控制常用方式之一。对于低频公交线路,例如城市郊区的低客流量线路,设置公交运行时刻表,公交车辆一般会提前到达公交站点停车等候,到相应的站点运行时刻表时间,才再次启动运行。对于高频公交线路,例如城市人流密集的高客流线路,公交车辆到达站点的时间间隔小,设置站点运行时刻表就变得没有意义,往往基于前后车辆的行驶情况,动态地调节公交车在站点的额外驻留时间,使得公交车和前后的车头时距尽量均衡,例如Daganzo 等[2]提出根据公交车和前车的车头时距调整控制点的驻留时间。公交驻站时间控制最明显的缺点是会增加公交车在站点的延误时间,公交运行效率低,乘客出行时间增加。公交信号优先[3]则是公交车头时距的控制的另一种更为高效的选择,Anderson[4]、陈光勤等[5]提出通过调整信号路口的信号灯,对路口范围内的公交车实施有条件的公交优先,即只对那些“晚到”的公交车给予优先通行,而对于“早到”的公交车则不实施优先,Chow 等[6]研究的方法中甚至会延长红灯以增加其在路口的延误时间。通过公交信号优先来保障公交车头时距均衡的控制方法,往往只局限在一个单一路口,车辆在驶离上游路口实现的车头时距均衡,可能在到达下游路口时被破坏掉,导致上游路口的信号优先被浪费,也很难保障车辆达到站点时仍然是均衡的状态。此外,公交车行驶速度控制[7]也是保障车头时距均衡的方式之一,但该方法受限于实际道路条件,只有在交通量极低或者有公交专用道的道路才能取得比较好的控制效果。
针对上述问题,本研究提出了车路协同环境下基于车头时距的多线路公交控制方法。在车路协同环境下,以公交站点为结点划分优化单元,公交车到达站点的车头时距均衡性为主要优化目标,建立统一的优化模型,对优化单元内所有路口的信号方案、公交车辆的行驶速度、驻站时间进行协同优化,实现公交车在全线路的实时动态精准控制。
2 总体流程
车头时距控制的总体流程图如图1 所示,首先对要优化的一条或多条公交线路所在的路网进行优化单元的分割,以减小问题规模;车路协同环境下实时获取公交车辆的位置信息、交叉口信号灯的状态、道路排队等相关数据;判断路网内是否存在目标公交车辆,若存在,则调用优化模型,求解最优的交叉口信号配时方案、公交车在站点的驻站时间、公交车的最优行驶速度等,并将最优方案下发到信号机和公交车车载端;滚动优化方案直至路网内的目标公交车全部驶离路网。

图1 方法流程图
3 优化模型建立
3.1 优化单元分割
以公交站点为结点,对公交线路所在路网进行分割,分割完成后的每个单元独立优化求解,以减小问题规模。以图2 中的公交线路B 和C 为例,线路B 的站点1到站点2(包括路口4 和路口5)组成一个优化单元;线路B 的站点2 到站点3、线路C 的站点4 到站点5 有共同的信号控制交叉口6,因此将这两条线路单元划分为一个优化单元,该优化单元包括信号路口3 和6。

图2 优化单元分割示意图
3.2 优化模型概述
模型解析公交车的行驶轨迹和公交车行驶速度、站点驻站时间、信号路口配时方案之间的关系,对公交车轨迹进行精准建模。分割完成后的优化单元用Φ 表示,包含一条或多条公交线路(公交线路用符号φ 表示),公交线路φ 中对应一个或多个信号控制交叉口,用符号m表示其在线路中的顺序,公交线路φ 的第m 个交叉口对应着编号为i 的交叉口,用符号iφm记录其对应关系。由于一个优化单元内存在一条或多条公交线路,可能会有共同的交叉口,则不同的(φ,m)可能对应同一个i。
模型对公交车的运行轨迹进行建模,建立二次混合整数规划模型,由目标函数式(1)和相关约束式(2)-(17)组成,输入变量包括优化单元Φ 内全部信号交叉口的信号配时方案及其约束,公交站点和信号控制交叉口的位置关系,当前时刻的全部公交车辆的位置、行驶速度约束、驻站时间约束等。决策变量包括优化单元Φ 内全部信号交叉口的当前周期的配时方案和下一周期的配时方案,公交车在优化单元内剩余路段的行驶速度,还未离开公交站点的公交车的驻站时间,以及对公交车优化后的轨迹进行描述的相关变量。如图3 所示,优化单元Φ 内线路φ,有两个信号控制交叉口m 和m+1,折线是公交车辆的优化轨迹,从当前时刻所在位置一直到行驶至下游公交站点。

图3 优化单元Φ 中的一条优化线路φ 的变量示意图
3.3 目标函数
优化模型的目标函数如式(1),主要目标是让公交车到站的车头时距和目标值差距尽量小,且离公交站点越近、系数越大,次要目标让信号配时方案的变化尽量小,以减少信号优化调整对其他社会车辆造成的负面影响。其中,是到下游站点的距离,是车辆n 到达站点的时间,Hnφ是目标车头时距,是优化后的当前周期和下一周期的配时,是不考虑公交优先的配时方案。

3.4 相关约束
公交车在路段中间的行驶轨迹的相关约束如式(2)-(6)。当前时刻t,如果车辆n 下游是信号控制交叉口,那么车辆到达交叉口的时间等于离开交叉口的时间减去车辆在交叉口的延误,如式(2),其中变量是路段的行驶时间,是在站点的驻站时间。路段行驶时间和驻站时间都需要满足最大最小值的约束,如式(3)和(6)。公交车离开上游路口的时间加下游路段的行驶时间和在下游交叉口的延误,等于离开下游交叉口的时间,如式(4)。若当前交叉口是优化单元内的最后一个路口,则离开当前路口的时间加下游路段的行驶时间,则等于到达下游站点的时间,用符号表示,如式(5)所示。

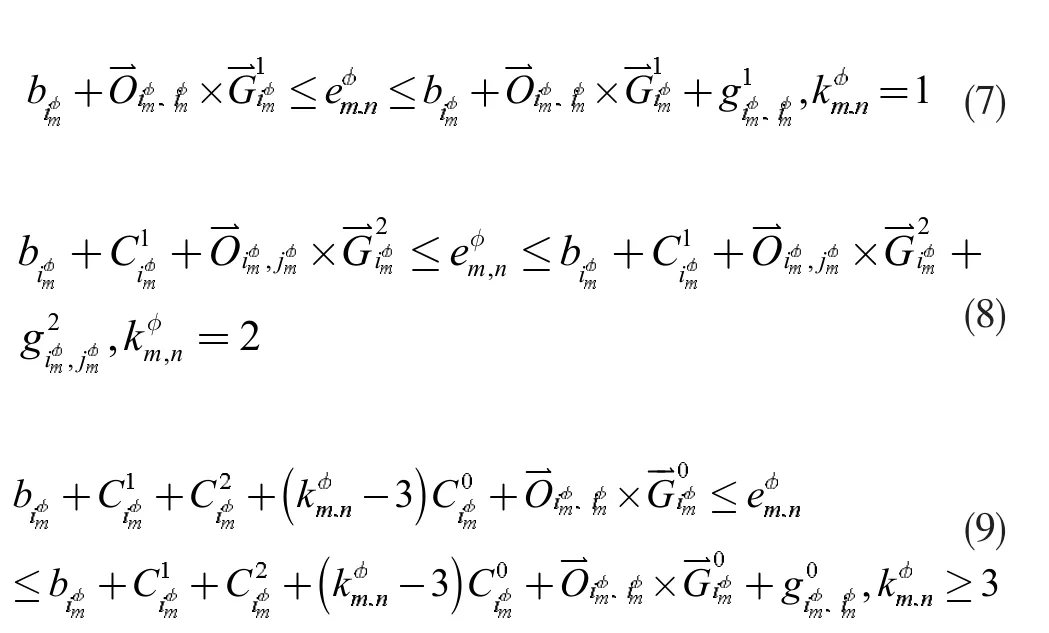
公交车离开交叉口的时间的相关约束如式(7)-(9)。公交车离开信号控制交叉口停车线的时间须在绿灯期间,若公交车辆n 在交叉口m 的当前周期离开,即,需满足式(7);若公交车辆n 从当前周期的下一周期离开,即,需满足式(8);若公交车辆n 从当前周期的下一周期的之后的周期离开,即,需满足式(9)。其中,bi是当前时刻对应周期的开始时间,是当前周期和下一周期的绿灯时间矩阵,是绿灯开始时间矩阵,即为当前周期相位j 的周期绿灯开始时间。交叉口i 不考虑公交车的信号方案周期是优化的当前周期和下一周期的周期时长。约束(7)-(9)为非线性的约束,为方便求解,需要将其做线性化的转换。
公交车到达交叉口的时间、离开交叉的时间、延误时间、清空时间等变量之间的相互约束如式(10)-(13)。不同的到达时间段,对应变量,其值为1 时,当车辆在当前周期的绿灯结束之前到达;其值为2 时,当车辆在当前周期的下一周期的绿灯结束之前到达;其值为3 时,当车辆在当前周期的下一周期的下一的周期的绿灯结束之前到达;其值大于等于4 时,当车辆在当前周期的下一周期的下一周期的之后的周期的绿灯结束之前到达。当时,公交车辆n 到达交叉口m 的时间满足约束式(10),对应不同的离开时间段,即的不同取值,有相应的约束如式(11)-(13),其中,是清空排在公交车辆n 前面的所有车辆需要的时间,是0-1 变量,值为0 是表示公交车无停车,值为1 是表示公交车有停车,E 是足够大的常数。

交叉口信号控制方案的相关约束如式(14)-(17)。绿灯的调整时间不能过大,需要满足最大绿最小绿的约束,如式(14)和(15)。此外,各相位的绿灯时间需要满足相位结构的相关约束,如式(16)和(17)所示。

4 案例分析
为验证上述优化模型的有效性,以深圳市公交线路M390 路(颂德花园公交总站→石厦南总站)在福田中心区内路径为例,基于VISSIM 微观仿真模型及其COM 接口,搭建“软件在环”的测试框架,对模型进行仿真分析。
4.1 数据输入
对测试公交线路及其所在的路网建立VISSIM 微观仿真模型,如图4 所示,该路网范围内,公交线路M390全长约4.5 公里,沿途共经过8 个公交站点和11 个信号控制交叉口。为避免对公交实施信号优先对其他社会车辆造成过大的影响,优化过程中约束各信号交叉口的各相位绿灯时间调整不超过10 秒。

图4 测试案例的VISSIM 仿真模型
仿真相关的参数设置如下:
预热时间:15min;
公交车发车数量:8 辆;
公交车发车间隔150s,站点驻站时间服从均值为60s的正态分布;
输入流量为改路网区域平峰时段的流量;
仿真时长:从0s 至最后一辆公交车驶离路网。
4.2 结果分析
通过VISSIM 输出公交车的相关运行情况,对模型优化的效果进行评价。若不对公交进行优化控制,那么8辆公交车的运行轨迹时空图如图5 所示,其中横坐标是以秒为单位的仿真时间,纵坐标是公交线路途径的信号路口的站点的距离,图中曲线为公交车运行轨迹,信号交叉口所在位置深浅灰色块对应公交相位的红灯和绿灯在信号交叉口所在位置,标注了每一时刻公交车通行相位的信号灯颜色。单辆车的全程的平均行程时间1163.75 秒(从进入路网到行驶至最后一个站点),其中第2 辆和第3 辆、第7 辆和第8 辆存在严重的串车现象,基本上是全程紧邻行驶。
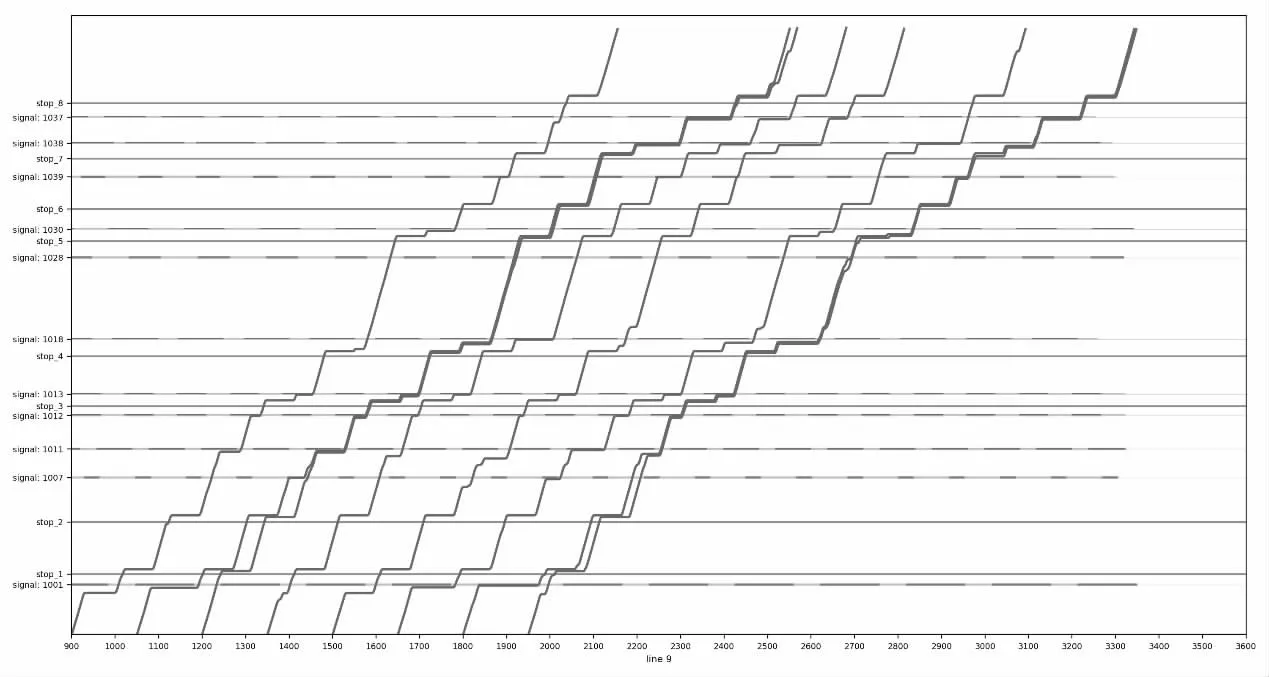
图5 无优化控制的公交运行轨迹图
保持VISSIM 的相关输入不变,利用本研究提出的优化模型,实时优化公交途径的信号交叉口控制方案等,得到这8 辆公交车的运行轨迹时空图如图6 所示,全部公交车辆的到达站点的车头时距保持间隔均匀的状态,车头时距标准差从101.88 秒降至16.69 秒,车头时距的均衡性提升83.62%,此外,公交车在全线路的平均行程时间也降至1024.25 秒,延误减少了11.99%。由于优化过程中,各信号交叉口各相位的绿灯调整时间不超过10 秒,从公交轨迹的排队情况也可以看出,实施公交信号优先并未对其他社会交通造成过大的负面影响,本研究提出的优化模型显著提高了道路交通总体效益。
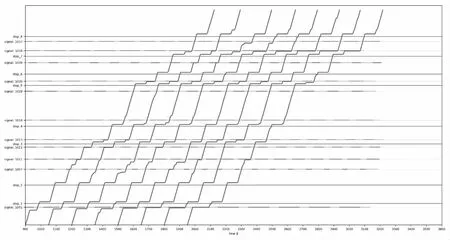
图6 进行优化控制的公交运行轨迹图
统计每辆公交车的进行优化控制和不进行优化控制的全线路行程时间,如图7 所示,不进行优化控制公交车的总体行程时间大于进行优化控制的场景,此外,不进行优化控制时,各公交车的行程时间有较为明显的波动,而进行优化控制时,各公交车在全线路的行程时间则相对稳定。
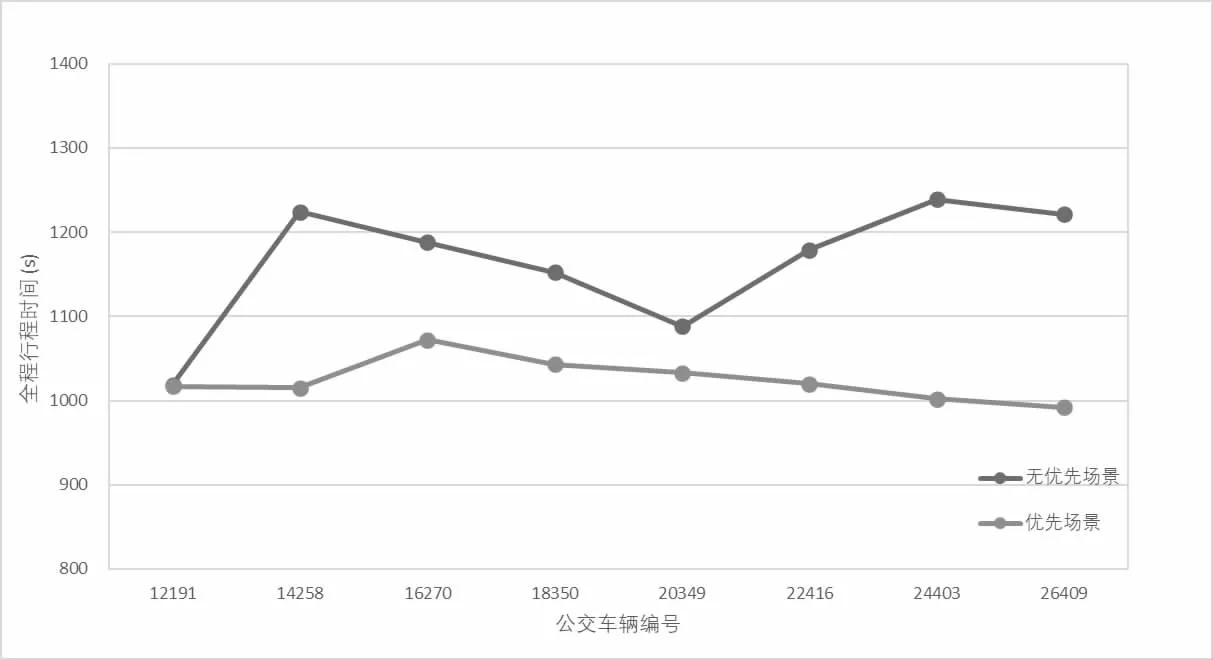
图7 公交车全线路行程时间对比
5 结论
本研究融合公交信号优先、公交驻站时间控制、车速引导等多种控制手段,在车路协同环境下对公交车进行实时动态的精准控制,以公交车车头时距均衡性为主要优化目标,同时提高公交运行效率,并尽量避免对其他社会车辆形成过多的影响。案例结果表明,在对其他社会车辆影响较小的情况下(相位绿灯调整时间不超过10s),本研究建立的优化模型能够显著提高公交车头时距的均衡性,车头时距的标准差降低83.62%,此外公交车的整体延误也有所降低,为11.99%,各公交车在全线路行程时间也更为稳定。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
建材发展导向(2021年19期)2021-12-06
文萃报·周五版(2021年11期)2021-06-23
党的生活·党员电教与远程教育(2019年9期)2019-12-02
中国工人(2019年4期)2019-09-10
党的生活·党员电教与远程教育(2017年9期)2017-10-17
故事会(2016年21期)2016-11-10
党的生活·党员电教与远程教育(2014年12期)2015-02-09