基于AlphaPose与REBA的手工搬运作业姿势风险评估方法*
2022-08-10 09:47郑颖琇陈再励何华刚
中国安全生产科学技术 2022年7期
陈 星,常 原,郑颖琇,陈再励,何华刚
(中国地质大学(武汉)工程学院,湖北 武汉 430074)
0 引言
与工作相关的肌肉骨骼疾病(Work-related Musculoskeletal Disorders,WMSDs)是一类职业性的慢性累积性疾患,是目前备受关注的职业健康问题之一[1]。WMSDs涉及各行各业,患病率较高,严重影响工人的生活质量,其中重复作业、不舒适的姿势、搬运、举重[2]均是导致WMSDs的主要原因。人工搬运作业[3]广泛存在于生产生活中,在建筑施工伤害中,因WMSDs造成的伤害占比大于37%[4],且大部分因人工搬运作业导致。WMSDs症状包括腰痛、颈、肩痛等,在各行业中搬运作业人群患病情况极为严重,主要症状常见于人体躯干的上肢和下背部区域[5-6]。据统计,从事手工搬运作业的工人中,有25%的工人存在背疼症状,23%的工人存在肌肉疼痛症状,WMSDs呈高发态势[7-8]。
评估工人作业姿势常用方法主要有自我评价法、直接测量和观察性评估[9]。自我评价法通过对工作日记、访谈、问卷的分析,收集工作场所对工人的不利因素;直接测量法通过试验对象在工作时附着人体传感器,收集工人的肌肉骨骼数据和运动角度,传感器主要由运动捕捉系统、脑电图仪和运动传感器[10]组成。自我评价法简单易行,但主观性较强,只提供最终的疲劳状态,不适用于建筑工人身体疲劳的调查。直接测量法在作业过程中可能中断正常工作活动,影响参与者试验过程中的生理和心理表现。针对人体数据收集,一般采用将职业安全与健康从业人员要求相结合的方式,但在建筑制造业中存在较大局限性。而观察性评估方法允许工人在工作过程中不受干扰地进行观察,可为人体工程学风险评估提供精确、准确的结果。
计算机视觉技术在安全风险防控方面的应用比较广泛[11],本文采用人体姿态识别AlphaPose模型检测作业姿势,根据关节点的位置坐标信息计算关节角度,依据快速全身评估方法(Rapid Entire Body Assessment,REBA)[12]评分规则,评估搬运作业姿势风险大小,便于及时修正工人的高风险动作,预防职业性肌肉骨骼疾患。该方法通过非接触式对采集视频进行识别检测,可计算视频中每一帧的骨骼信息、关节夹角、REBA评分情况以及该动作风险程度,评估过程中不影响正常作业过程,可广泛应用于作业现场。
1 AlphaPose模型与REBA方法
1.1 人体姿态识别AlphaPose模型
AlphaPose为分阶段检测模型[13],采用自顶向下的方法,利用目标检测算法检测人体,通过单人姿势估计(Single Person Pose Estimation,SPPE)算法对检测到的人体进行姿态估计,选取18个关键关节点构建人体骨架结构,骨骼关节点检测示意如图1所示。
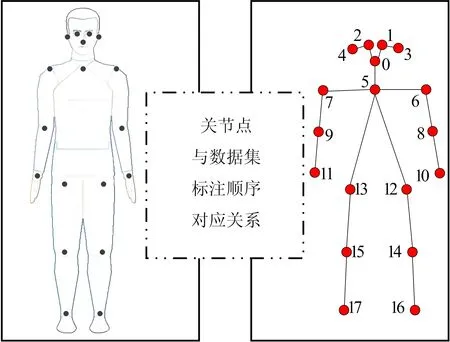
注:0-鼻子;1-左眼;2-右眼;3-左耳;4-右耳;5-肩中心;6-左肩;7-右肩;8-左手肘;9-右手肘;10-左手腕;11-右手腕;12-左臀部;13-右臀部;14-左膝盖;15-右膝盖;16-左脚踝;17-右脚踝
针对已有骨骼模型存在2个主要问题:定位错误和产生冗余检测结果[14]。AlphaPose模型添加3个模块:对称空间变换网络(Symmetric Space Transformation Network,SSTN)、姿态引导的样本生成器(Pose-guided Proposals Generator,PGPG)与姿态非极大值抑制器(Parametric Pose Non-Maximum Suppression,PPNMS)。SSTN通过自动调整检测框使目标检测结果更准确;PGPG对已有数据进行姿态引导扩充,达到数据增强目的;PPNMS通过定义姿态距离计算姿态相似度,可消除冗余的检测框,实现更精确的姿态识别与骨骼关节点检测。在MPII数据集上对模型进行训练,保证算法的检测精度满足试验要求,采用AlphaPose对人体关节点进行检测,得到18个骨骼关节点在每帧图像中的坐标(x,y),进而计算出该帧图像人体各个关节的夹角。
1.2 快速全身评估方法(REBA)
REBA方法于2000年由Hignett等研发,广泛应用于制造业、农业等行业的肌肉骨骼疾患评估。其基本原理是通过检测作业行为中的6种身体关节角度(躯干、上臂、下肢、颈部、下臂、手腕)以及3种影响因素(负荷、抓握、活动频率),对照评分表[12]获得相应分数,累计相加得到总分,分值高低代表该作业姿势的危害程度大小。
REBA方法评估流程如图2所示。分数查询表A~C具体见文献[12],且分数A由表A得出,分数B由表B得出,分数A与负荷分数之和得到分数C,分数B与抓握工具分数之和得到分数D,分数C与分数D共同得到表C,并最终得到分数E,最终结合活动频率分数(现在所进行的动作频率)得到作业姿势的REBA总分。在搬运过程中搬运动作的颈部和手腕2个部位处于相对静止状态,为排除非必要部位影响,将颈部及手腕在试验动作中的夹角限制为特定范围。根据REBA得分情况,基于表1中REBA与风险水平的对应关系,评估搬运作业姿势的风险等级。
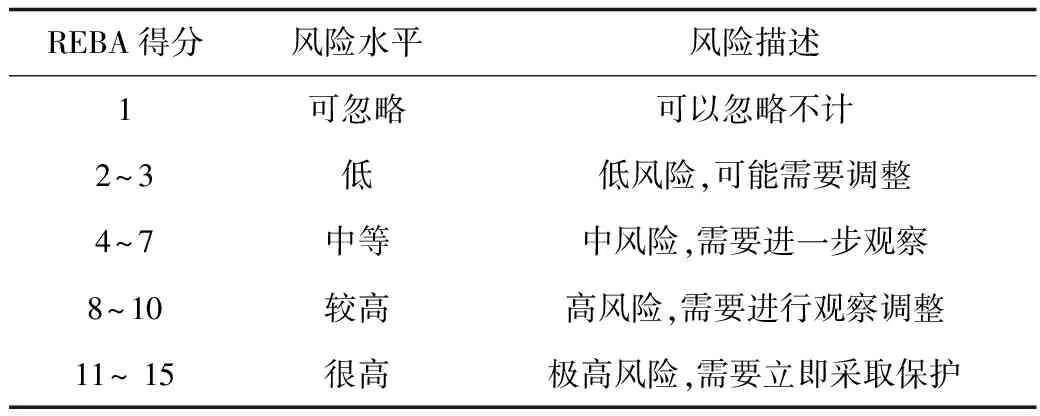
表1 REBA总分与风险等级
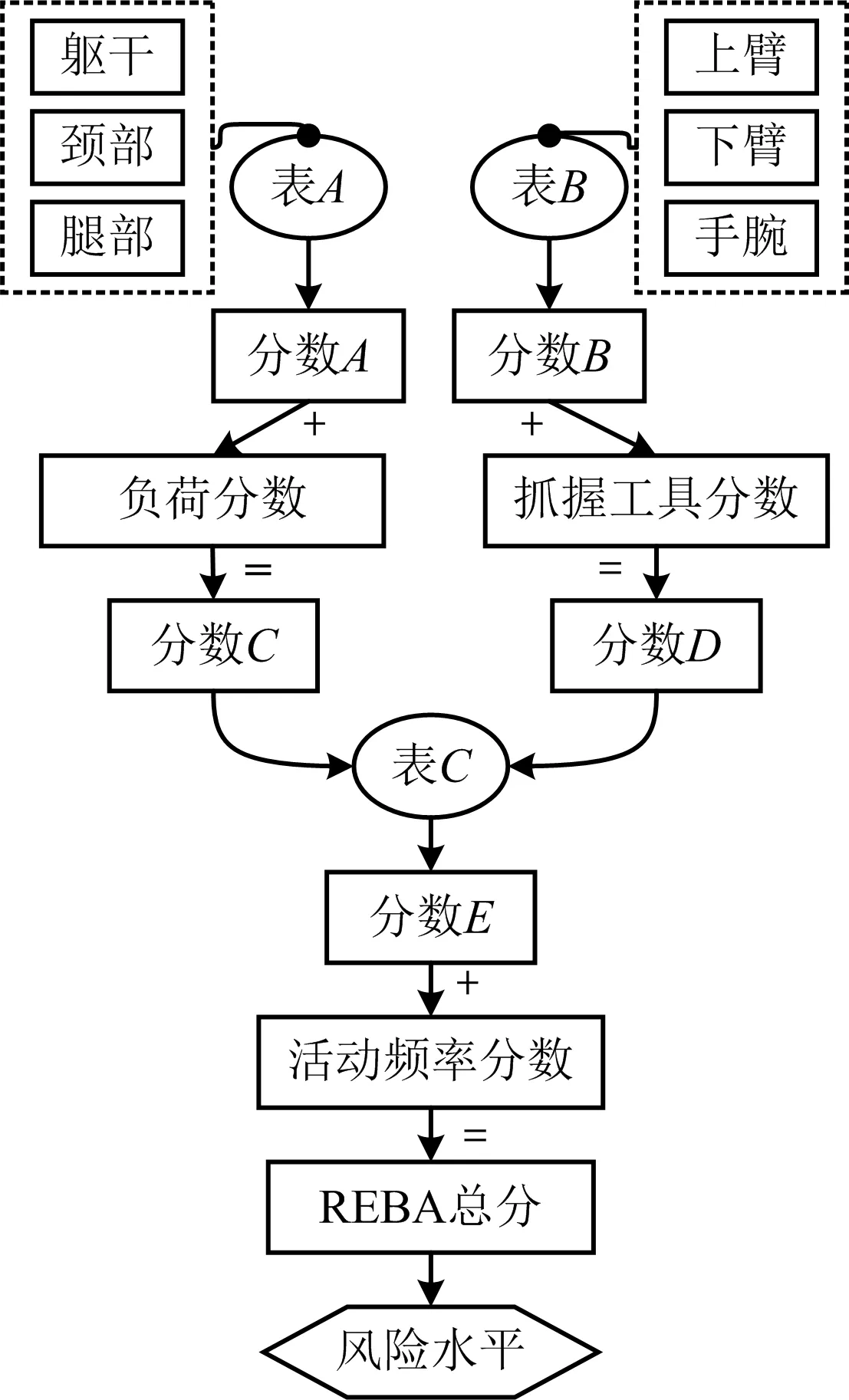
图2 REBA评估流程
负荷分数、抓握分数与活动频率分数是试验前设定的先验条件,需要在程序运行前作为已知变量进行手动设定。通过将AlphaPose模型与REBA方法结合,避免角度观测与人工打分的主观性,简化中间处理过程,结果以图表的形式输出,更加直观地针对视频动作进行分析评估,可准确检测人体骨骼框架,自动连续评估研究对象动作,评估效率高。
本文选取常见手工搬运作业作为研究对象,在试验室进行视频采集与数据分析工作。
2 手工搬运作业姿势风险分析
2.1 搬运作业WMSDs影响因素分析
人工搬运作业广泛存在于建筑和土木工程领域,施工工人一般从事搬运物料等高强度作业,具有连续性和重复性,作业过程中可能因为姿势不当、物料过重、长时间劳动等原因引起身体不适,导致WMSDs风险增加[15],其中最常见的是背伤,事故发生原因主要是人们对背部安全缺乏重视。依据《生产过程危险和有害因素分类与代码》(GB/T 13861—2009)[16],结合近年关于WMSDs的问卷调查结果,筛选搬运作业可能导致WMSDs的因素,分析手工搬运作业WMSDs主要影响因素,如图3所示。

图3 手工搬运作业WMSDs影响因素
WMSDs的影响因素主要体现在人、物、环境、管理4个方面。人的因素包括生理(年龄、身高及体质等)和心理(情绪压力等)因素,通常搬运工龄越长,患病概率越大;动作的实现都要经过自身心理过渡,消极的情绪可能会导致工作被动、效率下降,甚至产生不安全行为。物的因素主要包括物料重量、物料可抓握性,物料过重导致工人重体力负荷作业;可抓握性小、作业空间狭小,可能导致工人采用不良的搬运姿势。环境因素中,工人所处环境决定工作效率与安全性,应尽量减少在恶劣天气下的工作时间,长时间工作导致工人操作能力下降,更容易疲劳。管理因素中应坚持“安全第一、预防为主、综合管理”的原则,提高工人安全防护意识,确保个体防护到位,有轻症及时处理,搬运作业姿势培训尤为重要,可从根本上降低WMSDs发生概率。
不良的搬运作业姿势是手工搬运作业WMSDs最为重要的影响因素,其它因素都直接或间接导致不良作业姿势的产生,进而导致WMSDs患病概率增大。手工搬运作业目前主要管控方法为现场安全督察,包括个体安全防护、突发情况应急等,不能自动实时评估工人作业姿势的风险大小,不能现场快速评判动作姿势的危险性并及时提出改善意见。
2.2 手工搬运作业姿势分析
通过实地调研、问卷调查及专家访谈等方式,总结手工搬运物料常规动作流程如图4所示,首先观察货物具体情况,不能提取超过自己承受重量的物品;靠近货物采取屈膝下蹲的姿势,背部挺直提取货物;提取货物时腿部用力,身体微向前倾贴近货物,货物重的一侧靠近身体,不要扭动身体以免拉伤,缓慢起身;将货物放到指定位置,放下与提取顺序相反。
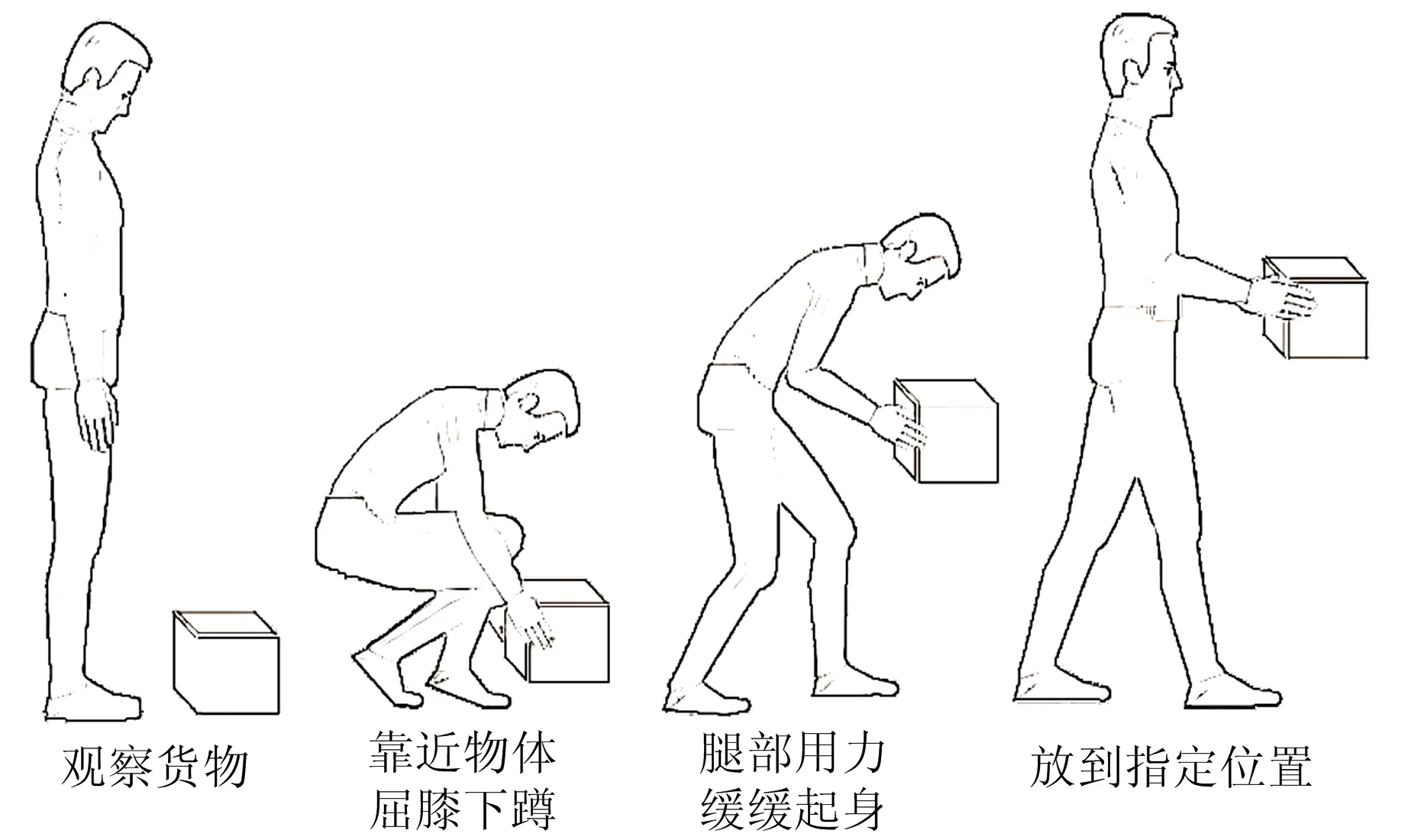
图4 手工搬运重物动作流程
搬运过程中经常出现的问题包括搬运的物品较重、采取错误的搬运动作、将物品从地面抬起时迅速扭转身体、搬运物品时物品距离身体过远、仅用身体一侧承受重物等。工人搬运动作不当是导致WMSDs的主要原因,下蹲拾取物品过程中最容易出现问题,应采取屈膝蹲坐的姿势保持背部挺直,但大部分工人一般弯腰直腿搬运重物,会加重背部肌肉负担。本文从人体工效率学角度对2种取物动作进行分析,讨论其导致职业性肌肉骨骼疾患的风险大小。
2.3 作业姿势风险评估框架构建
利用AlphaPose模型与REBA方法,构建手工搬运作业的WMSDs风险评估框架,如图5所示。将REBA的评分内容应用于骨骼数据处理阶段,对姿势的最终总得分进行风险分级,实现输出关节夹角的同时输出身体各部位REBA的总得分,生成随视频图像帧数不断变化的关节夹角、REBA总分以及作业姿势风险等级曲线图。经过实地考察发现,搬运动作的颈部和手腕处于相对静止状态,将3种预先输入变量(负荷、活动频率、手握工具)暂定为0,试验动作为搬运重物的行为。作业姿势风险评估框架主要由4部分组成,即图像和数据采集、基于AlphaPose的人体骨骼识别、基于REBA方法的作业姿势风险计算以及人体工效学风险评估报告生成。后续对评价过程进行详细讨论,主要包括计算人体姿态角度、REBA评分和确定WMSDs风险等级3个方面。
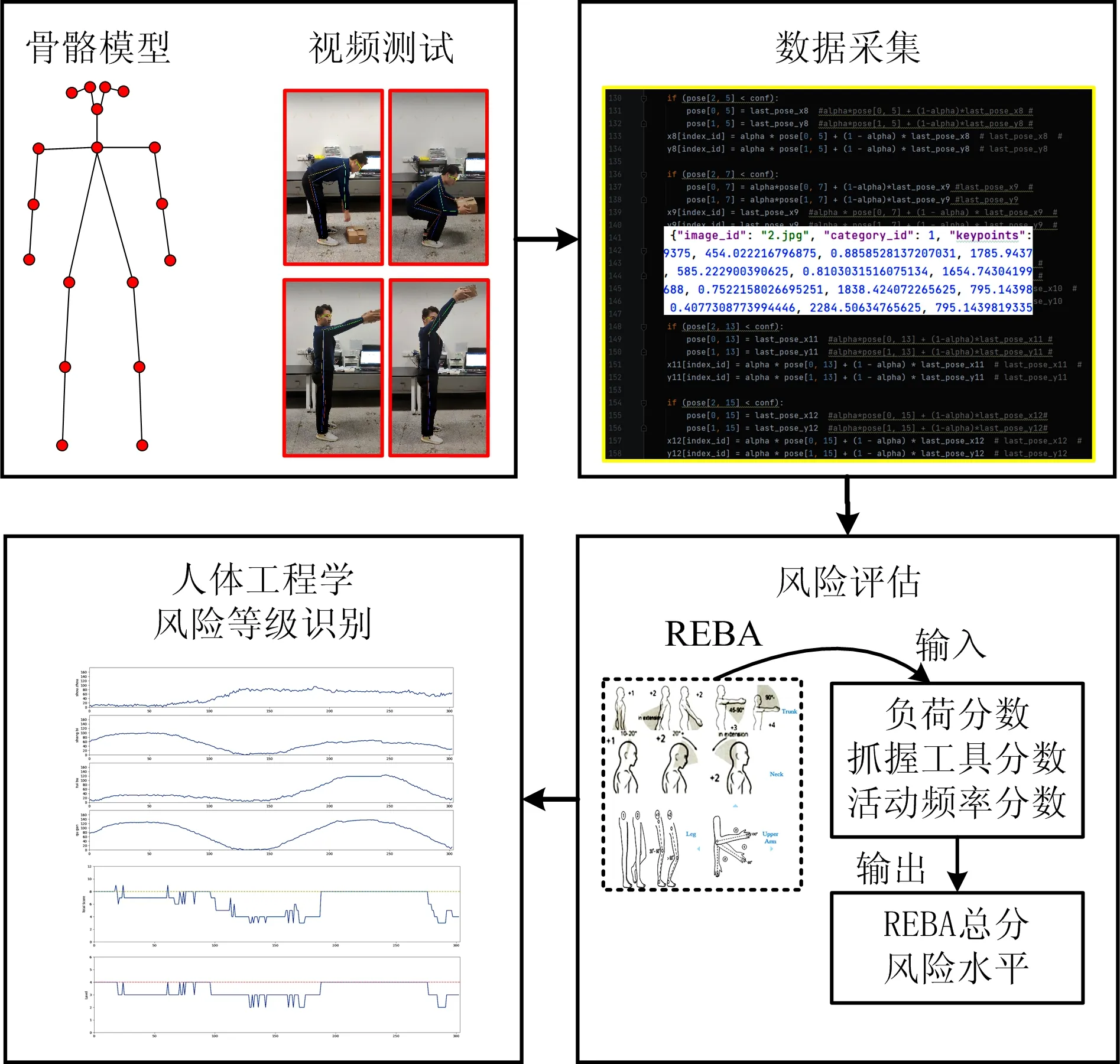
图5 手工搬运作业WMSDs风险评估框架
3 人体关节点数据处理
3.1 关节夹角计算
因为人体姿态识别模型输出的是人体18个骨骼关节点的空间相对坐标及置信度,关节点位置坐标不能直接输入REBA,需要将坐标信息转换为对应部位的身体姿势角度。相邻2个关节点可构成对应的肢体结构,采用空间向量的方法进行计算。
(1)
式中:θLE表示左臂肘关节角度,(°);L1表示左下臂关节向量长度;L2表示左上臂关节向量长度。
考虑到人体对称结构,上下臂及腿部关节角度分别为左右2组,结合REBA评分原则,为精确进行评分确定作业姿势风险,取身体左右对应部位的关节夹角最大值,如式(2)所示:
θ=max[θL,θR]
(2)
式中:θ表示身体关节角度,(°);θL为左侧身体关节角度,(°);θR为右侧身体关节角度,(°)。
3.2 数据滤波处理
加权滤波法(Savitzky Golay,SG)的核心思想是对窗口内的数据进行加权滤波,加权权重是对给定的高阶多项式进行最小二乘拟合得到[16]。经过SG滤波处理后,可有效保留数据变化信息,同时消除数据突变。SG计算原理如下:
对当前时刻前后共2n+1个观测值进行滤波,用k-1阶多项式进行拟合,如式(3)所示:
xt=a0+a1t+a2t2++ak-1tk-1
(3)
式中:t表示某时刻;xt表示t时刻的观测值;a0,a1,…ak-1表示参数,通过最小二乘法确定。
同理,对于前后时刻的预测值用式(3)进行计算,共得到2n+1个式子,构成矩阵,矩阵简化后如式(4)所示:
X(2n+1)×1=T(2n+1)×k+Ak×1+E(2n+1)×1
(4)
式中:X(2n+1)×1表示2n+1行1列的矩阵X;T(2n+1)×k表示2n+1行k列的矩阵T;Ak×1表示k行1列的矩阵A;E(2n+1)×1表示2n+1行1列的矩阵E。
通过最小二乘法求得A(k×1)的解如式(5)所示:
A=(Ttrans·T)-1·Ttrans·X
(5)
式中:上标trans表示转置;()-1表示矩阵的逆矩阵。
模型的滤波值如式(6)所示:
P=T·A=T·(Ttrans·T)-1·Ttrans·X=B·X
(6)
式中:P表示模型滤波值;B表示关系矩阵。
最终得到滤波值与观测值的关系矩阵,如式(7)所示:
B=T·(Ttrans·T)-1·Ttrans
(7)
通过计算B矩阵就可以将观测值转换为滤波值。
比对施工现场常见搬运动作,将其分解成相关度较高的3个动作即下蹲、小臂屈曲、手臂抬升,针对动作活动最频繁的4个关节(上臂、下臂、躯干、腿部)进行分析。考虑到视觉偏差及视频遮挡对结果的影响,对下臂肘关节进行测试,拍摄肘关节的规则运动如图6所示,将原始数据曲线与 SG平滑滤波处理后的数据曲线进行对比分析。

图6 肘关节规则运动
肘部关节夹角运动范围为20°~150°,角度变化序列如图7所示,虽然曲线变化趋势符合预期效果,但经过局部放大可以发现,夹角波动存在突变。经SG滤波处理后的关节变化曲线可以直观看出角度变化的曲线更符合人体运动规律,过渡更加平滑,没有明显突变。
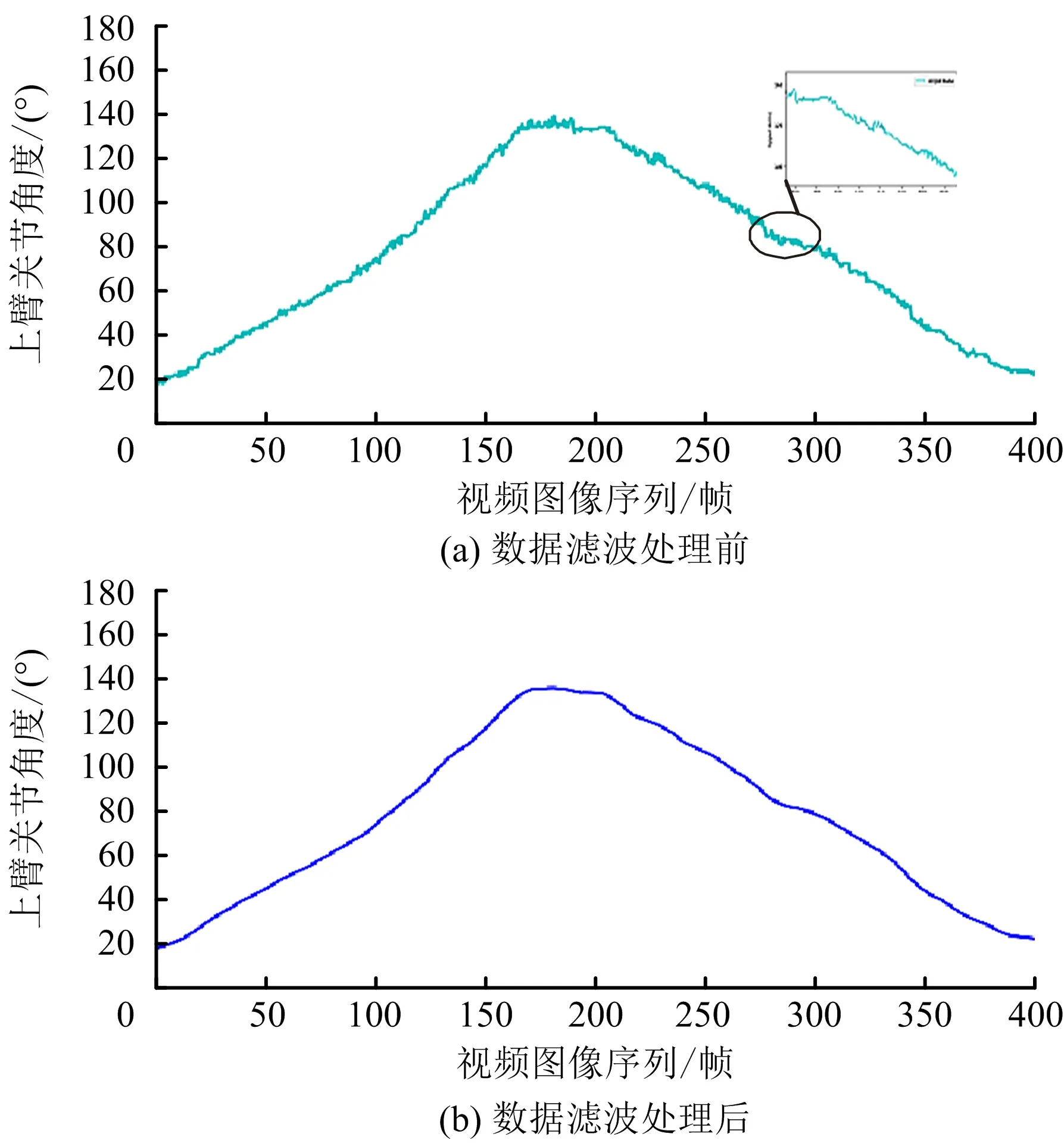
图7 肘关节运动角度序列
综上,算法提取的人体骨骼框架和视频中人体的耦合度较高,经过人工测量验证,算法计算精度与实际夹角差距可忽略不计。关节夹角的评分依据REBA方法,每个关节的分级跨度均较大,对于关节实际角度和算法计算角度在10°以内是可以接受的,对最终的评判结果影响较小。
4 试验分析
在试验室对工人搬运动作进行分阶段测试,测试试验对象完成拿起重物的行为,试验物品采用重量为500 g的长方形物块。试验第1阶段是经过专家调查证明该动作具有一定骨骼肌肉疾患风险的弯腰直腿取物;第2阶段是正常屈膝下蹲拾取物品,如图8所示。

图8 典型搬运姿势测试
试验共采集到312帧图像,对采集的视频进行作业姿势评估。试验对象身体主要部位夹角变化如图9所示。由图9可知,在第1阶段,弯腰直腿俯身取物的躯干夹角和腿部夹角变化不同步,而第2阶段的2个关节同步变化且角度相差甚较小。腿部和躯干夹角有明显相关联系,可应用于施工现场监测视频,判断监测对象进行搬运动作拿起时,是否有不舒适姿势的出现。

注:散点表示由原始数据计算每一帧图像的关节夹角;实线表示经滤波处理后的夹角变化曲线
作业姿势REBA得分如图10所示。经SG滤波平滑处理的数据,避免因角度范围微小变化而引起的评分突变,有效提高评分准确度。整个试验过程中,REBA总分最低为2,最高为7,风险水平为中,作业姿势有一定危害,应避免长时间连续工作,需要适当改善作业姿势。
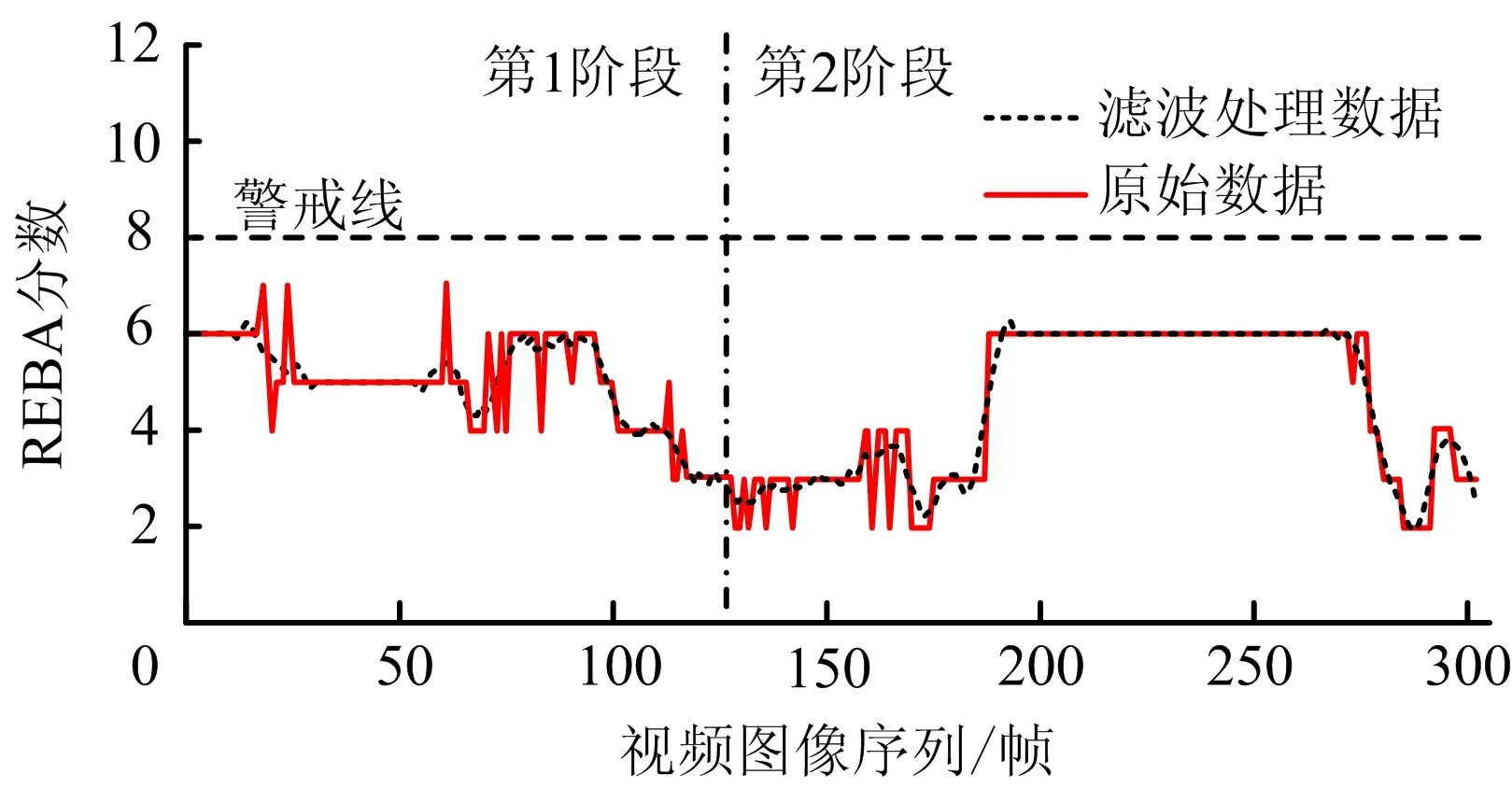
图10 作业姿势REBA得分
作业姿势的REBA总分低于警戒线,第1阶段REBA得分波动较大,相对于第2阶段得分更高,第1阶段隐含危险性更大,在提升试验物品时身体重心未下降,向前弯腰时腰部负担加重,易扭伤。在进行搬运作业时,应该监测现场工人身体各部位风险,明确指出其作业行为中的危险姿势,针对性地提出改善作业姿势建议。
5 结论
1)利用AlphaPose模型与REBA方法,提出一种非侵入式的作业姿势风险评估方法,通过采集视频数据对搬运作业姿势系统性评估分析,可输出监测对象身体的关节角度变化与REBA动态打分,为改善作业姿势提供参考。
2)本文研究方法对于视频的关节角度计算准确,数据滤波处理降低对视频采集质量的要求,适用于复杂多变的作业现场观测环境,可推广到对特定的动作进行分析评价。
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
文苑(2020年5期)2020-06-16
小学生学习指导(低年级)(2020年3期)2020-06-02
中国生殖健康(2019年10期)2019-01-07
电子制作(2018年16期)2018-09-26
中学生数理化·高一版(2018年5期)2018-06-04
新高考·高二数学(2017年8期)2018-03-13
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11