一种新型轮履耦合机构的研究及其运用
2022-08-18 08:12金承珂张晓龙温秀平纪宇刘林伟
机械制造与自动化 2022年4期
金承珂,张晓龙,温秀平,纪宇,刘林伟
(南京工程学院 创新创业学院,江苏 南京 211167)
0 引言
轮履变换是近期提出的新型运动方式之一[1-3],尤其适用于以平地为主偶有台阶、楼梯的城市环境。传统的轮履结合依靠叠加机构,结构臃肿且体积大,已经不适合现在的环境;而轮履耦合机器人只需要一套轮履耦合机构,其结构紧凑、可快速完成轮式行走和履带式行走的切换,兼备轮式机器人和履带式机器人的优点[4]。当遇到不易下陷的路面时,机器人以轮式行走[5];遇到沼泽、泥潭等地形时,机器人则以履带方式行走[6-7];当遇到垂直障碍时,机器人利用履带结构中较高的诱导轮进行越障。该技术可以应用在小型地面移动机器人[8]、越障爬楼轮椅[9-11]以及需要快速进行轮履变换的场合。比如,需要更换三角履带轮的军用越野车或民用重型越野车辆在更换三角轮时大约需要20min,而采用轮履变换方案可在短短几秒内完成切换,大大提高了更换效率。现在的研究大多只是针对大型车辆设计的轮履耦合结构,而对于小型机器人的研究还很少见[12]。
因此,本文针对小型机器人提出了一种轮履耦合结构设计的新思路。该结构的特色之处在于,这种新型结构不局限于橡胶履带,而是采用强度和耐磨性更高、阻力更小的金属履带。在遇到障碍时,较高的诱导轮会帮助其越障。当越野机器人在较平坦的路面进行移动时,越野机器人的移动机构为轮式;而当越野机器人遇到沼泽、废墟和台阶时,其轮子内部两根叉臂带动履带展开,转化为履带式移动。这样可以将轮式移动的高速、高效和履带式移动高越障性的优点有效地组合,从而使越野机器人的可行驶范围得到大幅度拓展。同时,该越野机器人在履带状态下受到冲击时叉臂会向内略微收紧,以此来缓解冲击,保护其内部的结构。
1 轮履耦合传动机构的设计
1.1 通用部分设计
本系统可采用普通直流电机或步进电机驱动。车体内部主要有电机、传动带、主轴、离合器和内侧车轮板等。离合器配有离合器拨叉、舵机齿轮;内侧车轮板配有拉索、板弹簧。电机利用中间挠性件(同步带)将动力传递到主轴上。车体横截面图如图1所示。
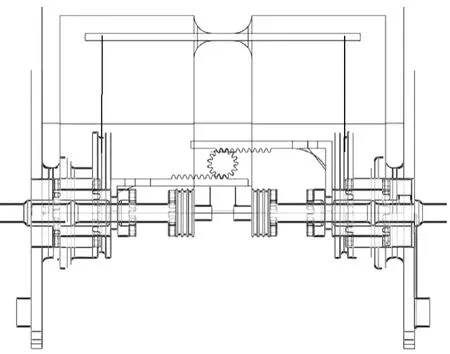
图1 车体横截面结构
1.2 轮式传动路线设计
轮式运转时,离合器与主轴相连,内侧车轮板也与离合器相连,此时叉臂由于离合器带动拉索而处于收紧状态,履带被叉臂向内带动并被叉臂夹住,并将内侧车轮板与外侧车轮板露出,并依靠它们行走。
1.3 履带式传动路线设计
履带式运转时,离合器与主轴脱离,又与内侧板脱离,而叉臂由于车轮板上安装的扭簧而处于伸展状态,履带被张紧,并从车轮板伸出,同时由电机带动的主轴利用同步带将动力传输到与叉臂同轴布置的两个主动轮上,主动轮带动履带使车轮行走。
轮式运转与履带式运转时轮板如图2所示。
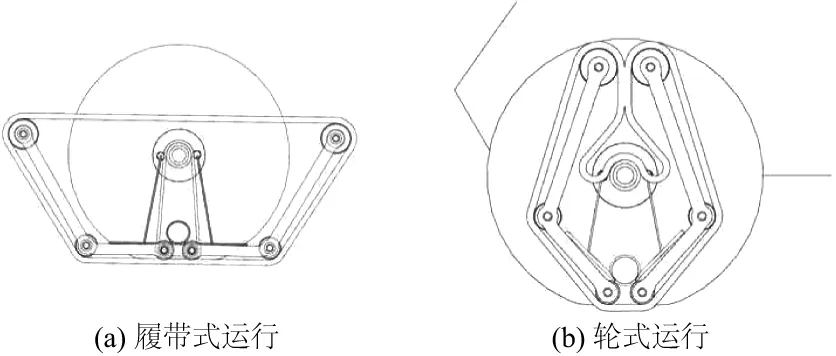
图2 轮履变换时轮板内部结构
1.4 轮履变换过程设计
当履带式向轮式转变时,舵机带动齿轮旋转,利用齿轮齿条机构将拨叉向内侧移动。此时离合器由于拨叉的作用也向内侧移动,并同时与主轴、内侧车轮板接合。与此同时,这3个部件同步回转,即车轮整体同步回转。而离合器靠外的部分固定有拉索,离合器带动拉索向内侧移动,拉索的另一端固定在叉臂上。拉动前,叉臂由扭簧与履带固定(用扭簧向外推动,外侧的限位依靠履带周长);拉动后,叉臂向内收缩,收起并夹住履带,并将轮子露出。
当轮式向履带式转变时,离合器向外侧移动,拉住叉臂的拉索松开;叉臂在扭簧的带动下张开,并将履带拉直;而内部由于离合器脱离,内侧车轮板在偏心轮与板弹簧的预紧力下以正常运转情况保持稳态。此时以履带式行走。
2 轮履耦合执行机构的设计
当履带式运行时,叉臂展开,将承重轮与诱导轮推出车轮板,主轴外侧的同步带轮利用同步带将动力传输到主动轮上,主动轮带动履带运动。
当轮式运行时,所有轮子板内部的构件与主轴同轴旋转。简化车体结构如图3所示。
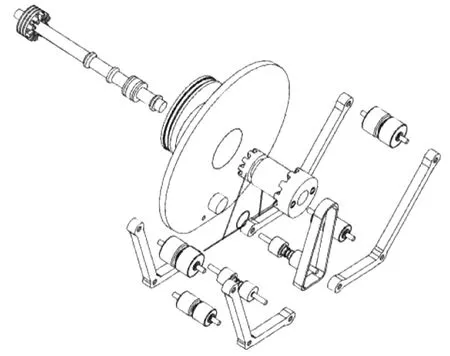
图3 轮履耦合车体外侧结构爆炸图
此处有一个难点,就是如何使车辆运行时轮式变换为履带式时,叉臂能可靠地夹住履带。能否可靠夹紧涉及几方面因素:1)夹紧速度,可通过加大舵机转速实现;2)履带质量,由于金属履带惯性大,故无需额外改进;3)履带销与履带板之间的摩擦力矩,可通过提高履带销与履带销孔的表面粗糙度方式予以改善;4)车速,虽然此轮履耦合机构可在运行过程中变换运行模式,但履带式变换为轮式时车速不能过快,车速过高时,履带受到的惯性力过大,会使夹紧不可靠,甚至无法夹住履带。此时履带可能会脱离车辆,故要设置一个履带式变换为轮式时的最高车速。
3 轮履耦合越野机器人跨越障碍姿态分析
表1为轮履耦合越野机器人参数说明。
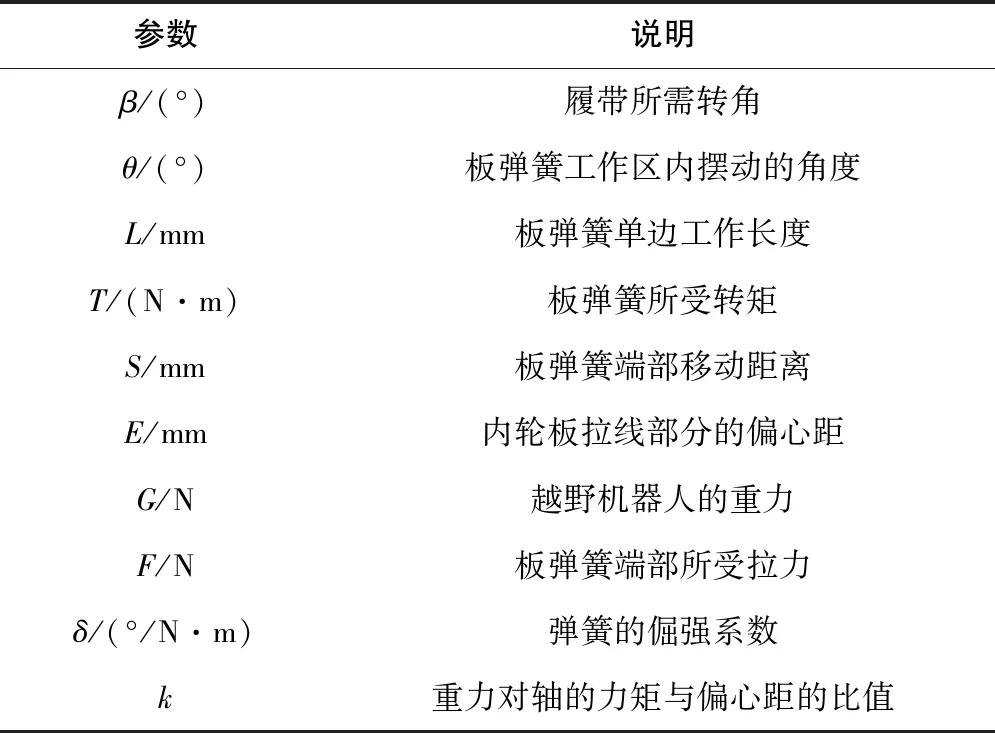
表1 参数说明
综上分析可得:θ=δT,T=LF,S=L/tanθ,S=Esinβ,F=kG/4,β≤arcsin[L/Etan(δLkG/4)]
综上所述,若需改变履带摆动角,则可选择改变内轮板偏心距或改变板弹簧参数(工作长度与倔强系数),但β不可远小于arcsin[L/Etan(δLkG/4)],否则越野机器人在轮式向履带式转变时,会因履带的角度位置不正确而颠倒。
在使用刚性履带且张紧合适的情况下,履带整体可等效为一个刚体,在通过垂直障碍时,前诱导轮的高度决定了能越过垂直墙的最高高度;而障碍的类型决定了越障时的障碍冲击前叉臂的压力角。前、后履带中心扭转角随爬30°坡障碍百分比的简化函数曲线(未计算惯性的影响)如图4所示。在越野机器人以履带运动的过程中,履带可根据地形的变化而旋转一定的角度,如图5所示。这两幅图用于对利用此结构的越野机器人中板弹簧等局部结构进行优化设计。
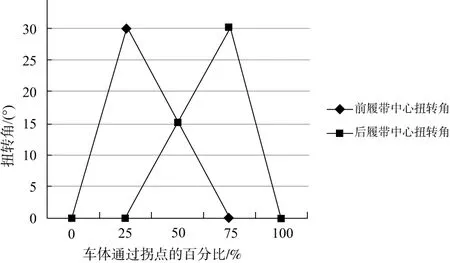
图4 前、后履带中心扭转角随爬30°坡障碍百分比的函数曲线
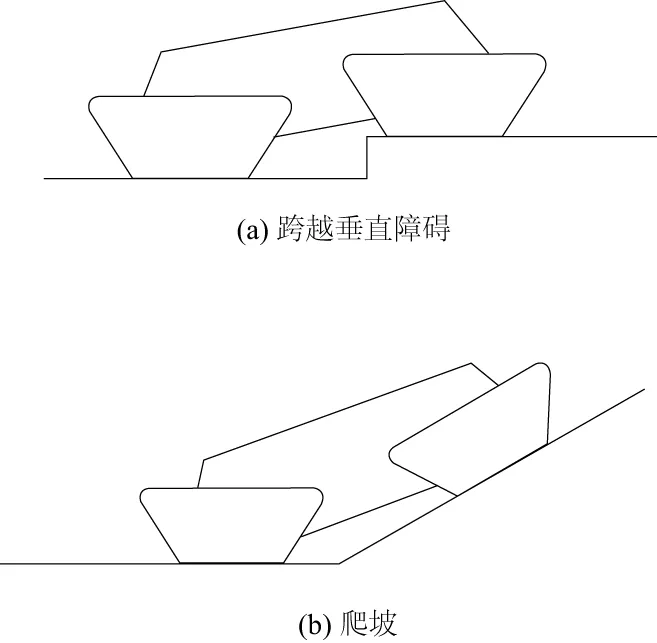
图5 在不同地形上运动示意图
4 轮履耦合运动与结构特性分析
轮履耦合结构的优点体现在可以用轮式运动达到高速、低能耗的效果,利用履带式运动以达到高越障能力、高通过性。其运动特性就在于这种移动机构可以依靠内部的结构完成轮式、履带式转化,而不是像普通轮履复合机构那样带有两套臃肿的运动机构。所以该轮履耦合移动机构除了可以在路况较好的路面上快速移动外,也可在沼泽、废墟和火场等恶劣地形上运动,以达到搜索、侦察、爆破等特殊任务;且更轻盈的结构可以提高加速度,减小能量损耗,提高续航能力,以达到节能减排的目标。
本文的结构图中没有画出轴承,因较小的实物模型可利用减磨材料如特氟龙片等作为滑动轴承使用,若做成成熟的越野机器人结构需更改部分结构,如安装法兰等。由于本文介绍的结构中轮式运行时,车体与地面接触的只有内轮板与外轮板,故只适合在比较平整且坚固的路面上运行。若遇到对越野要求不是特别高的地形,如较为湿润的泥土路面等,就利用轮式运行,否则会导致严重下陷,甚至可能会损坏机械结构。若要提高轮式的通过性,则可提高内轮板与外轮板的厚度,也可做成孔板式或者轮辐式。
由于轮式运行时,接触地面的压强较大,故内轮板与外轮板要用强度较高的材料,例如表面硫化挂胶的高锰铸钢。
5 控制系统
5.1 系统概述
该轮履耦合式越野机器人控制系统分为手动控制与自主控制两种方式。
手动控制采用手持终端遥控设备对机器人进行控制。该手持终端遥控设备采用2.4G无线通信模块与机器人进行数据交互,通过获取遥控面板信息将其转换为规定数据包格式,并以指定通信协议进行数据发送。机器人接收到相应帧数据之后将该数据按规定数据格式进行数据解析,通过数据解析得到机器人运行速度、运行模式、运动方向等数据,最终通过解析得到数据对底层驱动进行相应控制。
自主控制通过远端控制台发送目标位置,机器人通过北斗卫星、GPS模块进行定位,通过获取当前位置并结合接收到的目标位置来调用谷歌地图或百度地图API并实现路径规划来获取路径信息,最终通过控制电机来改变机器人的运动轨迹从而实现机器人的自主导航。机器人在运动过程中通过陀螺仪来进行姿态矫正。越野机器人通过树莓派搭载OpenCV采集摄像头数据进行图像处理并配合外部光电传感器对周围路况进行分析来实现在行进过程中的自主避障。
5.2 硬件系统
为实现路径规划、自主导航、自主避障与越障功能,轮履耦合越野机器人的硬件电路各模块需要结合其功能完成选型与设计,合理的硬件电路设计将为越野机器人的运动提供硬件保障。越野机器人的硬件电路总体设计思路如图6所示,其主要模块选型如下:
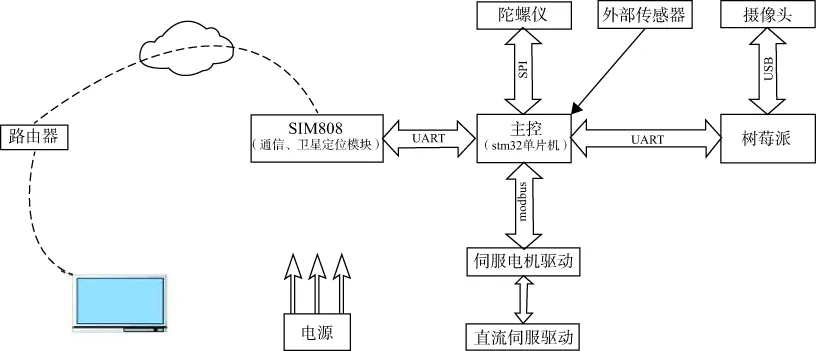
图6 越野机器人的硬件电路总体设计思路
1) 主控制器:主控制器是机器人的核心,采用stm32系列单片机用于接收并处理各单元发送的信息,协调整机工作,并在执行控制算法之后产生对应的信号发送给伺服电机等执行设备,控制机器人的运行。
2) 电机与其驱动:该设计采用带有modbus通信协议的直流电机驱动装置与主控进行通信,具有较高的拓展性。
3) 避障系统:采用树莓派搭载OpenCV采集摄像头数据进行图像处理具有较高的性能。OpenCV是开源的计算机视觉库,具有强大的开源社区和一些内置函数供调用,并加入外部光电传感器对周围路况进行辅助检测。
4) 陀螺仪:采用MPU9250九轴传感器控制姿态MPU9250集成了三轴陀螺仪、三轴加速度计和三轴地磁计。其自带的MPL(motion processing library)库,只需将传感器数据push到MPL lib,MPL会处理9轴数据,计算当前姿态角度,频率最高可达200Hz。
5) SIM808通信与北斗、GPS模块:SIM808是由SIMCOM推出的GSM+GPS+蓝牙三合一组合模块。北斗、GPS模块结合了北斗、GPS技术来获取当前经纬度信息。它采用了行业标准的USART接口,可轻松通过USART与主控制器实现数据交互。
6) 电源模块:电源正常供电是机器人各单元正常工作的前提。电机为24V电压,该机器人的电源选用6s35C的锂电池,并通过Sepic斩波电路进行稳压后送至伺服电机驱动器,在保证电机可以获得可靠电压的同时减少降压带来的能耗,并通过多路LDO线性稳压至各模块工作电压后送至各单元模块进行供电。
5.3 软件系统
该机器人整机通信采用modbus通信协议,主要分为主控制器、直流电机驱动装器、无线接收板、视觉系统、电源系统部分。各部分均带有RS485接口。
6 结语
轮履耦合式移动机构是一种十分有效的越障方式。然而,通常研究的轮履耦合机构由于要求履带长度的变化,故只能装备可变长度的柔性履带,故导致强度、耐磨性、机械效率和适用性都较低。在通过高温区域,或长时间在复杂区域运作时,会产生起火融化及过度磨损等问题。
本文提出的轮履耦合机构特别适用于小型、微型越野机器人,而且对动力要求不高的中大型越野机器人可将轮履变换的原动件装入车轮中,利用无线通信或在轴周围安装电刷类的结构传递电力与信号。
笔者已完成以3d打印结构为主的样车模型的制造与装配,并完成了基本的运动实验。但若要用于实际情况,需改变或添加部分结构(如连杆、轴承、法兰等),并以机加工为主进行加工制造。
本文论述的机构是在车轮内安装了可以展开履带的结构,机构内的部件都有确定的相对运动关系,且结构紧凑,强度高,耐高温,耐磨。
如果要进一步对这个机构进行参数优化设计,其重点在于轮板和叉臂。
猜你喜欢
兵器装备工程学报(2021年3期)2021-04-09
军民两用技术与产品(2021年10期)2021-03-16
汽车维修技师(2017年9期)2017-02-04
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
科技视界(2014年6期)2014-12-24
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
客车技术与研究(2014年5期)2014-02-28