无人机电池快换系统的设计
2022-08-18 08:12冯陆颖平雪良孙明春郁章敬
机械制造与自动化 2022年4期
冯陆颖,平雪良,孙明春,郁章敬,4
(1. 江南大学 君远学院,江苏 无锡 214122; 2. 浙江大学,浙江 杭州 310058;3. 宁波诺丁汉大学 ,浙江 宁波 315154; 4. 中国科学院大学沈阳自动化研究所,辽宁 沈阳 110016)
0 引言
为节约人力成本,提高效率,市面上部分无人机已采用自动换电池的方案来解决电池容量不足引起的一系列问题[1]。精准的定位及一定程度的固定是无人机自动换电池的前提和基础。无人机自动返航时,着陆点距离初始起飞点会有1~2 m 的误差[2],通过视觉传感器可以进一步缩小离指定位置的位姿误差[3-4]。然而普通无人机通过将GPS与视觉传感结合的方式降落到换电池平台后,其位置精度往往仍不能满足换电池要求。现已有通过外部装置解决无人机定位的相关专利,如利用锥面解决精度问题,但对无人机腿部结构做了较大改动,只能用于单一外形的无人机定位,而从腿内侧开槽的方式也要求无人机腿变粗[5]。又如利用带传动,从外向内定位无人机来解决此问题,然而此装置占地面积较大[6]。为了解决上述问题,本文提出一种无人机电池快换系统,该系统由外定位装置与换电池装置组成。其中外定位装置将无人机自身具有的定位能力配合外部的机械定位,以实施对无人机的精准定位及固定,为后续换电池操作提供良好的环境。所使用的特制电池盒,在适用于市面上大多数航模电池的同时,既能牢牢固定于无人机,又方便被新的特制电池盒置换;通过换电池装置上的齿轮驱动无人机上的齿条带动连接电源的插头进行插拔,稳定可靠。该系统能提高无人机换电池时的定位精度及速度,具有抗干扰能力强、算法简单、实现成本低、占地面积小、应用范围广等优点,可以满足正常工业生产需求。
1 无人机电池快换系统机械结构
本文提出的无人机电池快换系统示意图如图1所示。该系统采用外定位装置对已降落的无人机位姿进行调整并固定,从而达到换电池所需要求,并采用换电池装置对无人机进行电池更换。

图1 无人机电池快换系统示意图
1.1 外定位装置机械结构设计
无人机外定位装置主要由外定位平台、锥齿轮换向器、滚珠丝杠、定位杆及电机组成,整个机构长700.5mm,宽650mm,高220.64mm,其装置俯视图如图2所示。
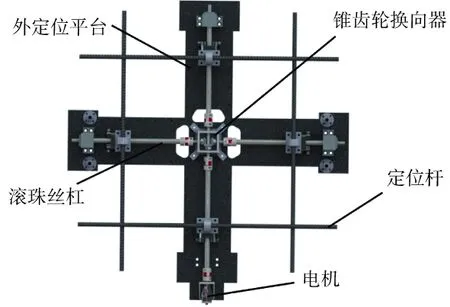
图2 外定位装置俯视图
在该外定位装置中,锥齿轮换向器四周分别连接4根丝杠,连接电机的丝杠为左旋,其余均为右旋。这样电机旋转即可通过锥齿轮换向器分别带动其余3根丝杠同步转动,从而使丝杠螺母沿丝杠爬行,进而实现定位杆的同步移动。丝杠螺母及其上零件示意图如图3所示。定位杆通过涨套与定位杆座连接,定位杆座通过4个螺栓固定至丝杠螺母座。由于丝杠螺母座与平台距离6mm,为使定位杆始终平行于平台移动,故利用外螺纹轴承进行导向。
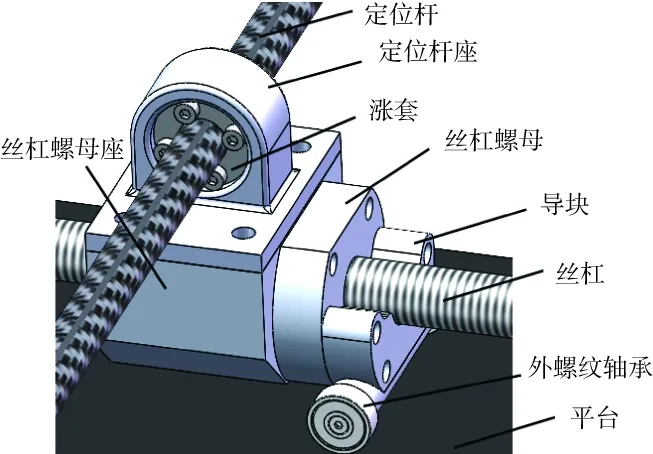
图3 丝杠螺母及其上零件示意图
1.2 换电池装置机械结构设计
换电池装置主要由丝杠、不完全齿轮、滑块、特制电池盒、舵机、推板、电机等组成。该装置正视图及左视图如图4、图5所示。该电池快换装置中,电机带动丝杠旋转,使丝杠螺母带动推板延丝杠爬行,推动新电池置换旧电池,并将旧电池推向充电装置,舵机控制推板在改变推电池方向时旋转。不完全齿轮机构在无人机降落时无齿轮处朝上,定位完成后不完全齿轮机构转动,带动固定有插头的齿条座沿滑轨向外滑动。
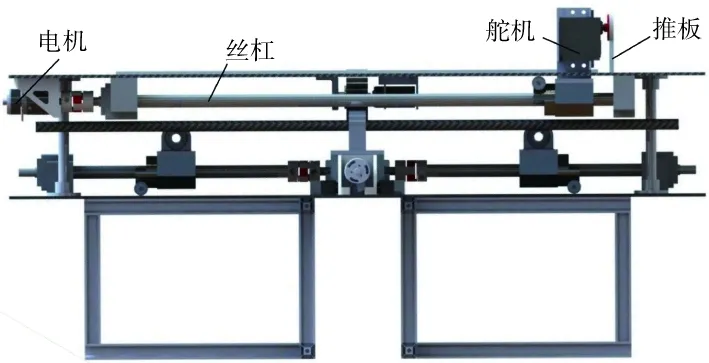
图4 电池快换装置正视图
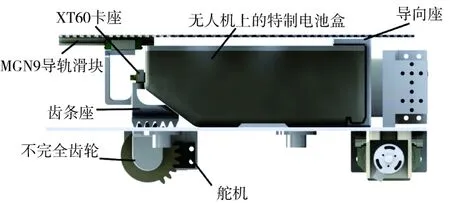
图5 电池快换装置左视图
1.3 无人机机械结构设计
无人机主要由机身、支架、起落架、任务平台、特制电池盒座组成,其侧视图如图6所示。齿条座通过螺栓连接在MGN 9滑块上,滑块两端装有限位块,两限位块内侧距离为24.5mm。XT60插头通过XT60固定座固定于齿条座。海绵腿套位于如图6所示位置。无人机定位时与定位杆接触,定位时可提供较大的静摩擦力防止无人机产生位移。
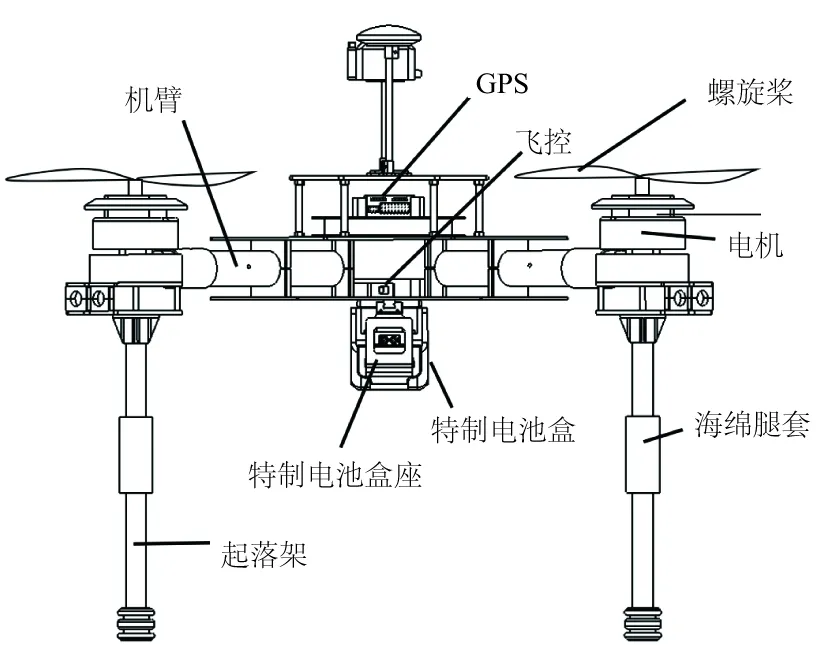
图6 无人机侧视图
特制电池盒由特制电池盒底座、特制电池盒盖、普通航模电池和XT60延长线组成,其实物图如图7所示。特制电池盒底座与特制电池盒一侧利用梯形固定,另一侧利用螺栓固定;而XT60延长线一端固定于特制电池盒底座,另一端与航模电池连接,极大地方便了特制电池盒内航模电池的更换。

图7 特制电池盒实物图
1.4 电池快换工作原理
无人机电池快换系统在无人机换电池前后流程如下所述。
1)无人机接收到换电池指令,无人机内部的飞行控制系统控制无人机自动返航至换电池装置上空悬停,无人机通过视觉传感器扫描换电池平台上的二维码调整自身位姿,随后降落于无人机电池快换系统上。
2)外定位装置收到无人机降落信号后电机动作,驱动电机轴所连接的丝杠转动,此丝杠头部所连锥齿轮带动其余3个锥齿轮同步转动,4个丝杠螺母座被其上固定的丝杠螺母带动,沿丝杠向外爬行,此时丝杠螺母座上的4根定位杆同步向外移动,遇到无人机起落架则将其向外推;无人机4根起落架被4根定位杆卡住后,检测到电机电流超过阈值,电机停止转动,此时无人机腿上海绵腿套紧压定位杆,无人机精确定位。
3)换电池装置接收到无人机定位完成信号后,舵机带动不完全齿轮转动,带动齿条座上的插头向外移动。随后电机转动,带动丝杠螺母上的推板将新的特制电池盒推向无人机上的特制电池盒座,旧的特制电池被推出无人机电池盒座。
4)新电池推到准确位置后,舵机带动不完全齿轮反向转动,带动齿条座上的插头向内移动。电池更换完毕,无人机上电。
5)外定位装置收到信号,电机反转使各丝杠螺母沿丝杠向内爬行,直至导块触碰到碰撞开关,无人机外定位装置复位,无人机启动。
6)换电池装置上的舵机旋转90°,电机反向旋转,丝杠螺母带动推板移动一个特制电池盒宽度+2mm,随后舵机反向旋转90°,电机正向旋转,带动推板将耗尽电的特制电池盒推至充电座。
2 控制系统的硬件结构与软件设计
2.1 硬件结构
无人机选用树莓派作为上位机,因此视觉识别系统硬件部分主要由树莓派4B以及通过板载摄像头模块CSI接口连接的树莓派RPI 8MP摄像头组成。树莓派体积小、运行速度块,使用Python进行编程,而Python拥有庞大的标准库以及很多现成的开源代码,因此大大降低了视觉识别的难度。成像设备方面,选用树莓派RPI 8MP摄像头,RPI 8MP体积小、质量轻、工作电压低、拥有800万物理像素,画面清晰细腻。
无人机电池快换系统的硬件结构主要由搭载STM32F407芯片的探索者开发板以及通过板上外设连接的2个大疆2006电机、2个驯龙者MG995舵机、1块PCA9685舵机控制板、5个碰撞开关组成。STM32F407探索者开发板资源丰富,有丰富的接口和功能模块,满足本次设计要求。大疆2006直流无刷减速电机搭配C610减速电调,额定转矩为1N·m,可以实现对转矩的精确控制。本次设计使用的舵机是驯龙者MG995型号的180°数字舵机,能在0°~180°之间运动,反应快,角度精确,扭力大,采用双轴承,内阻小不抖舵,具有堵转保护功能。本设计中选用PCA9685控制以上两个舵机,PCA9685是一个16路12位PWM信号发生器,价格便宜,且周期和占空比都可控,12位精度,i2c通信,可节省主机资源。碰撞开关采用的是欧姆龙SS-5GL2微动开关,体积小,质量轻,安全稳定。
2.2 软件设计
树莓派RPI 8MP摄像头作为树莓派的外设,可以直接通过芯片引脚实现图像的实时传送,并对图像进行处理,得到二维码3个定位角点在摄像头所拍摄到的二维画面中的坐标值。将该坐标值与图片中心坐标值进行比较,便可得出无人机和外定位装置的相对位置关系,随后,树莓派与无人机飞控进行通信,无人机调节自身位姿。
无人机电池快换系统的主控板可以接收来自外定位装置上碰撞开关的信号,判断定位杆是否到达初始位置、极限位置,接收来自换电池装置上碰撞开关的信号,判断新的特制电池盒是否被推至无人机电池盒座对应位置以及推板的两个极限位置,接收来自外定位装置上电机的电流信号判断定位杆是否夹紧无人机。当在行程范围内所接收到的电流增大时说明定位杆与无人机4根起落架接触,主控板控制电机减速;当电流急剧增大超出所设阈值时,说明无人机已被准确定位,主控板控制电机停止动作。外定位装置中主控板还可设置定位模式,一种为自适应模式,定位控制系统通过定位时作用在电机上的负载判断无人机是否被定位,从而控制电机的启停;另一种模式为预设模式,主控板先通过自适应模式感应定位杆的定位终点位置,进行记忆,下一次定位时,则可在定位杆接近无人机起落架前控制电机快速运转,并在定位杆贴近支撑腿时,使电机缓慢运转,直至定位杆至定位终点位置时使电机停止运转。
系统运行流程图如图8所示。
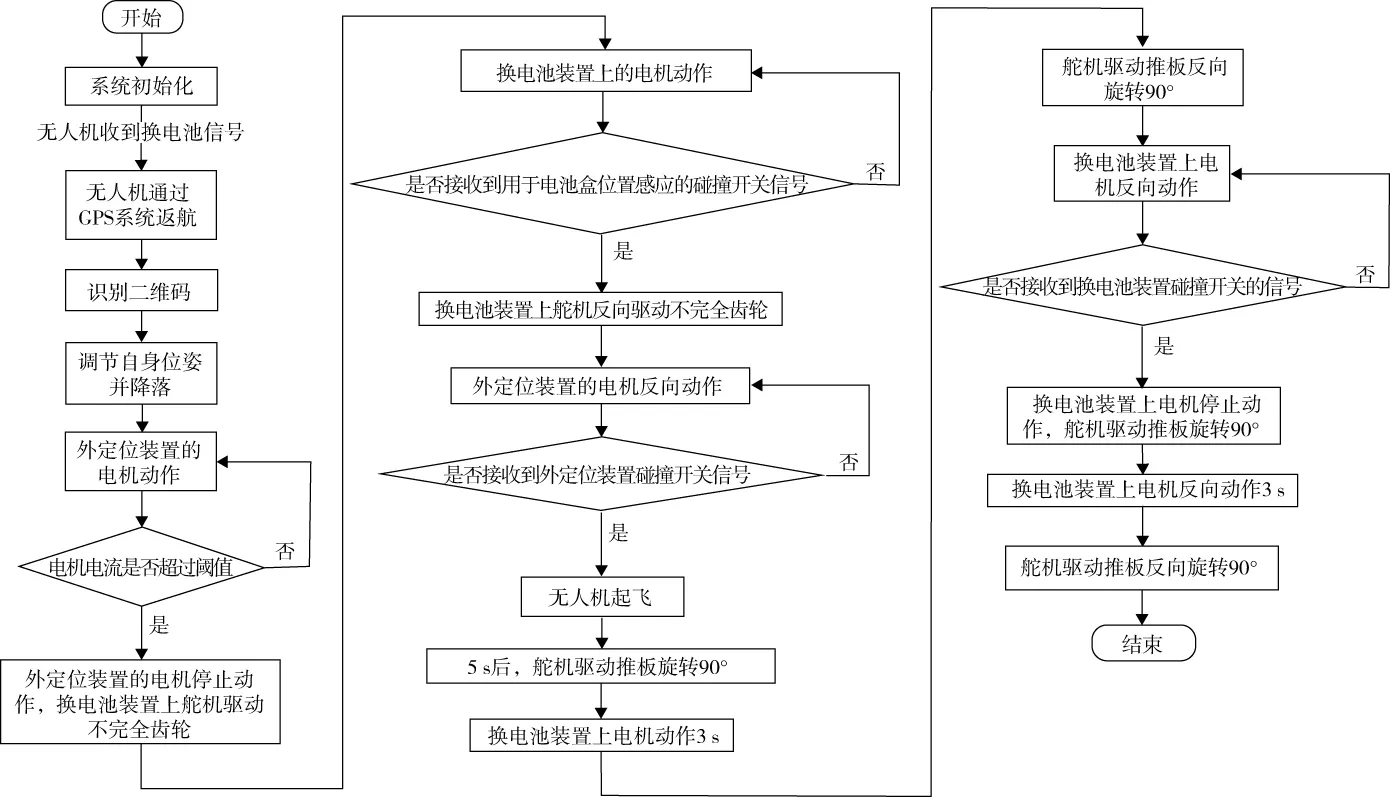
图8 系统运行流程图
3 实验结果
在实际测试中,无人机飞行时,无人机上的特制电池盒座能将特制电池盒牢固、稳定地固定在无人机上,外定位装置能准确、稳定地将无人机定位在准确位置,换电池装置能顺利为无人机置换电池。由于实验中只试验同一只无人机,为判定无人机是否定位完成采用了碰撞开关信号。需要指出的是,XT60插头的插拔需要很大的力,会导致齿条座的变形,虽然能对插头进行插拔,但插入时总会留有缝隙。针对这个问题,后期对齿条座进行了优化,其刚度增加后该问题得到很大改善。未来可考虑将XT60插头换成其他插拔力度更小的插头。本装置实物图如图9所示。
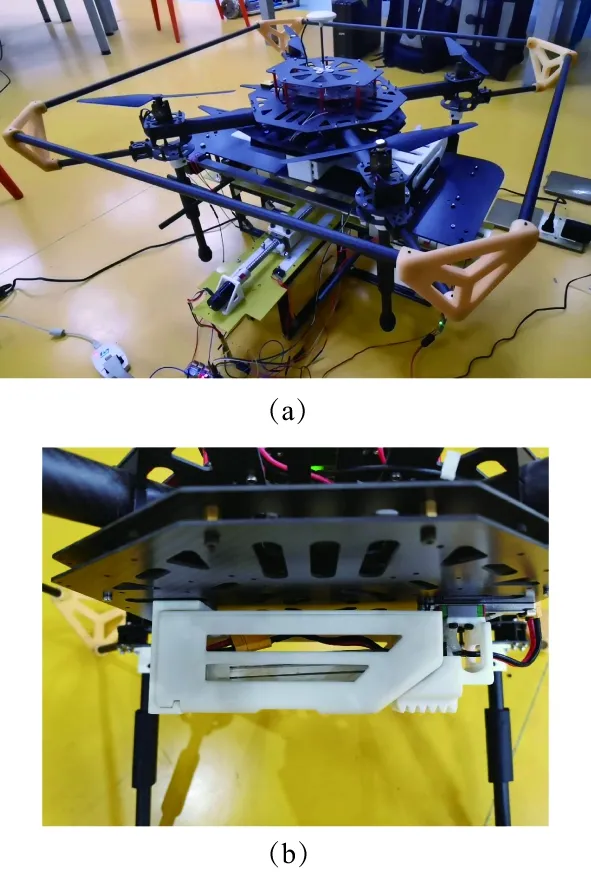
图9 装置实物图
4 结语
本文针对现有无人机换电池装置存在的一些问题,设计了一种无人机电池快换系统,有效解决了无人机续航时间短、电池充电周期长、更换装置体积大、成本高等问题。其机械装置结构精巧,控制简单,采用的特制电池盒可以适应市面上大多数的航模电池,应用更加广泛。此外,该无人机外定位装置还可以拓展其他功能,如用于辅助无人机装载物品时的定位,具有广阔的发展前景。
猜你喜欢
机床与液压(2022年8期)2022-09-19
——树莓
作文小学中年级(2022年5期)2022-06-02
商品与质量(2020年48期)2020-11-26
动漫界·幼教365(大班)(2020年5期)2020-09-06
汽车实用技术(2020年4期)2020-04-10
科教新报(2019年27期)2019-09-10
电子制作(2019年11期)2019-07-04
电子制作(2017年17期)2017-12-18
农产品市场周刊(2016年43期)2016-12-23
文学港(2011年3期)2011-11-21