一种全自动蛋皮机的设计研究
2022-08-18 08:12潘红恩徐红金黄旭宸钱鹏
机械制造与自动化 2022年4期
潘红恩,徐红金,黄旭宸,钱鹏
(南京信息职业技术学院,江苏 南京 210023)
0 引言
中国人的餐桌上通常不缺各式各样丰盛的美食,特别是鸡蛋饼及其包裹成的风味小吃,让人爱不释手。一般人工制作蛋皮,生产效率低,规模不大,卫生也难以保证。
平面转盘式蛋皮机体积比较大,难推广;自调平蛋皮机蛋皮成型棍是竖直的,蛋液不容易粘牢,容易脱落[1]。
本文设计的是一种平面转盘式的蛋皮机,体积小、使用简单方便。文中主要介绍项目整体方案,阐述全自动蛋皮机设计的三维建模及运动技术方案,最后通过运动仿真验证蛋皮机的功能。
1 蛋皮机整体方案设计
项目设计方案如图1所示,所研究的是一种能自动上下料、实用新型的全自动蛋皮机。设计方案主要包括三大部件:动力源装置、蛋皮机主体、机械手抓取装置。动力源部分为蛋皮机的运转提供动力,可以选择一个小型的动力泵提供能源。执行部分是蛋皮机的主体部分,由传动链、送料装置、驱动机构、转子、机架和电饼铛等组成。所设计的关节式机械手抓取装置能够实现吸取、安放、搬运蛋饼等功能。三大部件通过各机械部件的设计、三维建模、装配及运动仿真,并完成整体调试运动仿真,达到全自动蛋皮机设计要求。
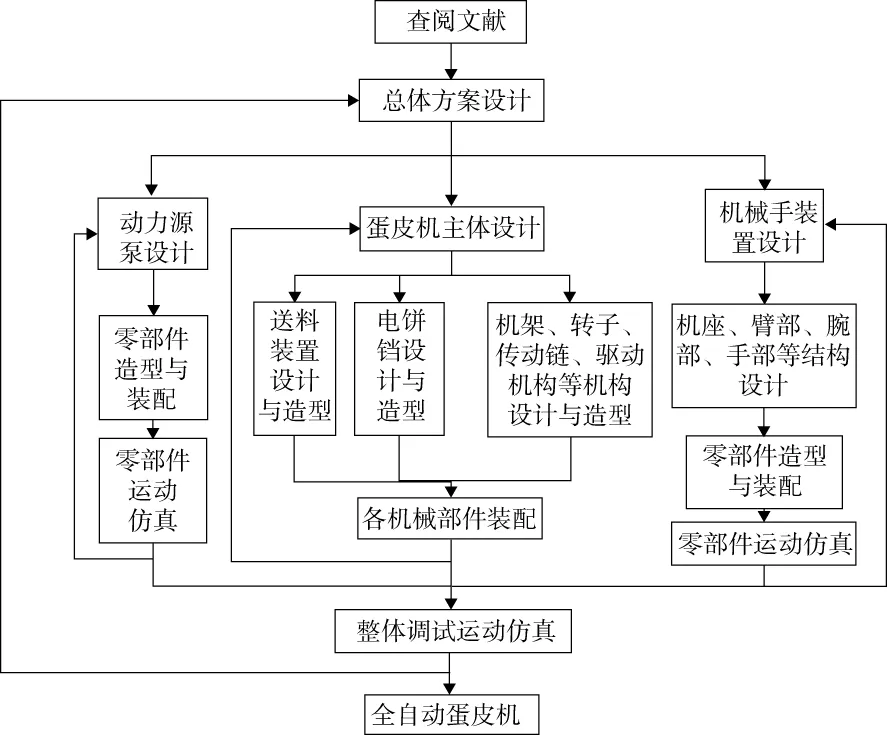
图1 整体设计方案
2 蛋皮机的设计、三维建模及装配
2.1 蛋皮机主体设计及三维建模
如图2所示,蛋皮机主要包括机架、转子、传动链、送料装置、电饼铛、驱动机构和垫台。项目实施中采用6个电饼铛18个工位的方案,设计原理如下。
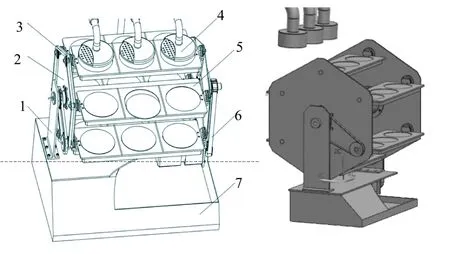
1—机架;2—转子;3—传动链;4—送料装置;5—电饼铛;6—驱动机构;7—垫台。
转子主要由左板、空心转轴和右板组成。左板和右板由空心转轴的两端垂直连接。转子安放在机架上,转子上装有电饼铛,电饼铛之间由传动链连接。机架上设计有驱动机构,驱动传动链动作。
送料装置主要由定量主输送管、控制箱、输送泵、料桶、至少一根分输送管、与分输送管数量相等的喷头上壳、上料电机和与喷头上壳数量相等的均料网等组成。送料装置设置在机架外侧,把蛋液输入电饼铛内的每个工位。
机架包括左立板、底板和右立板。底板的两端垂直安装有左、右立板,左右立板对称设置;左固定套垂直于板面设计在左立板的上部板面内侧面上,左固定套与左立板相通;固定链轮设置在左固定套上,固定链轮靠近左立板的板面处,并设滚动件;在左固定套内固定安装绝缘套且绝缘套伸出左固定套,在伸出左固定套的绝缘套外表面上装有第一和第二耐磨铜套,且由导线连接。左右固定套同轴。在右固定套的孔内通过轴承支承转轴。
驱动机构设计有第一带轮、第二带轮、电机和同步带。电机固定在底板的背面,位于右立板的下方,电机轴上装有第一带轮,通过同步带带动第二带轮,第二带轮安装在右立板端部。
电饼铛主要由左耳、右耳、加热盘、电饼铛右电刷盘、电加热管、电饼铛左电刷盘、保温托、右轴、左轴和同步链轮组成。在加热盘的表面上有内凹锅面,在加热盘的下方设有电加热管,电加热管位于保温托内,保温托连接加热盘,加热盘的左右两端伸出形成加热管左右端;加热盘的左右两端设有左右耳,左轴垂直于左耳的外侧面,在左轴上有绝缘套,电饼铛左电刷盘安装在左轴的绝缘套上,电饼铛左电刷盘与加热管左端由电连接;左轴的端部装有同步链轮,同步链轮位于左板的外侧;左板上的固定轴套与左轴的轴套孔相配;右轴垂直于右耳的外侧面,在右轴上装有绝缘套,右轴的绝缘套上装有电饼铛右电刷盘,加热管右端与电饼铛右电刷盘由电连接,右板上的固定轴套与右轴的轴套孔相配。
传动链设计有第一、第二链条和从动链轮。固定链轮与电饼铛左轴上相同齿数的从动链轮由第二链条连接在机架上,保持电饼铛锅面的平动;第一链条连接所有电饼铛左轴上的同步链轮,这样转子上的所有电饼铛都保持平动[2]。
2.2 蛋皮机主要部件的有限元分析
固定链轮是蛋皮机中不可缺少的传动部件,它的强度直接影响到蛋皮机的安全可靠性,故有必要对其进行有效静力学分析。将建立好的固定链轮模型导入ANSYS Mechanical中,通过加载约束(在固定链轮的两侧施加一个位移的约束),应力分析(链轮的接触面施加压力),固定链轮的位移图和总应力如图3所示(红色表示位移大,蓝色最小)。固定链轮安全可靠(本刊为黑白印刷,若有疑问可咨询作者)。
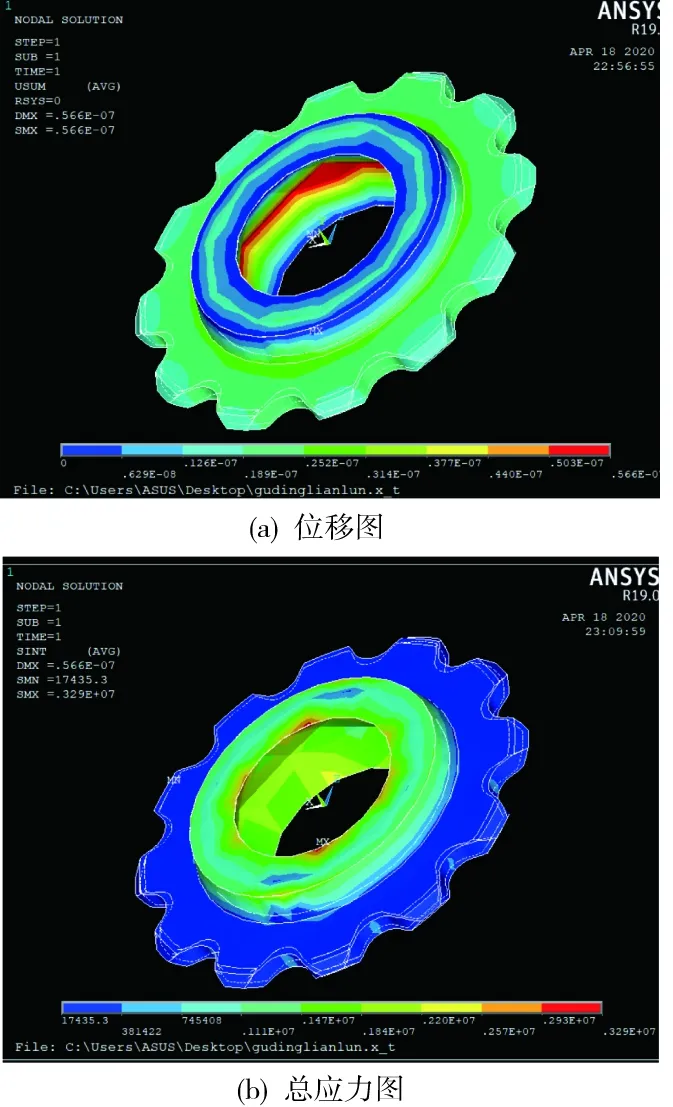
图3 固定链轮位移图和总应力图
2.3 抓取机械手控制系统
抓取机械手的执行机构由底座、立柱、电机、大臂、小臂、手腕、吸盘、气缸和活塞等组成。机械手的驱动系统由气动装置来驱动,主要是依靠机械手各部位的活塞通过气压来进行运动[3]。采用可编程序控制器(PLC)设计机械手的控制系统。机械手吸取和摆放蛋皮的动作过程如图4所示。机械手手臂上升至上限位,底盘旋转使吸盘处于蛋皮的正上方,这时蛋皮机暂停,机械手抓取吸盘移动到蛋皮上,产生吸力,机械手把蛋皮吸取并移动至上限位,底盘再次旋转,使机械手的吸盘处于放蛋皮处的正上方,机械手向下移动,吸盘把蛋皮移动至桌上,吸力取消,蛋皮放下,机械手上升至上限位,吸盘旋转,然后重复进行上面的动作[4]。
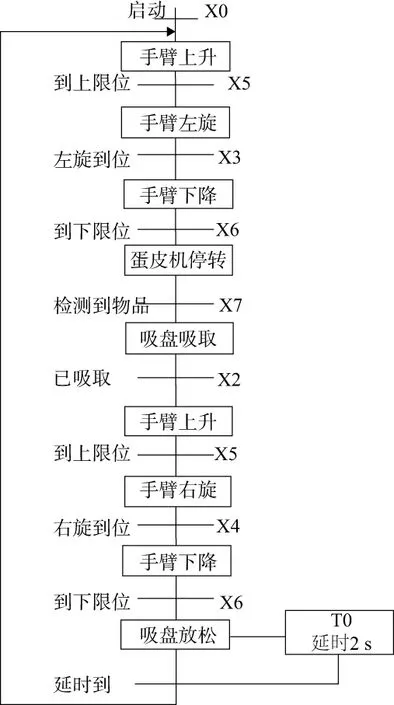
图4 机械手动作示意图
2.4 蛋皮机的虚拟装配
图5所示为蛋皮机的整体装配图,三大部分之间的关系为:送料装置通过输送泵(未画出)由输送管将蛋液输送到喷头,蛋液均匀输送到位于下方的电饼铛工位内,经由电饼铛加热后,机械手从吸盘中取出。
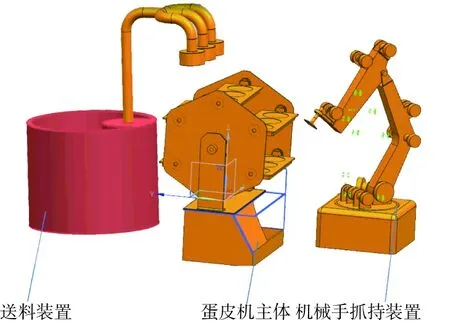
图5 蛋皮机的整体装配图
3 蛋皮机的工作过程
蛋皮机的工作流程如图6所示。首先制作好蛋液,并将蛋液加入与送料装置相连的料桶内。总开关上电,通过控制器(未画出),动力源泵通电,启动上料装置,机架开始旋转,同时电饼铛加热电源启动,转子转动电机。蛋液开始从备料箱经过输送泵的自吸原理输送到管道中,经过流量控制器,可显示已经流动的原材料量的多少。当流量达到设定值时,流量控制系统反馈到主控制器中,泵停止工作。90°阀默认开启,蛋液经过输送管进入喷头中。在电饼铛短暂处于最高位即喷头下方时(定义此位置为第1工位,本实施例中有6个电饼铛,定义转子转动1圈,就经过了6个工位),输送泵送料,蛋液下落到锅面内工位,逆时针向后转动转子,电饼铛运动到第6工位时,蛋饼已经成品,机械手吸取出蛋饼,退回到安全工位,同时发送反馈信号给控制器,结束一个工作流程[2]。

图6 工作流程图
4 蛋皮机的运动仿真
利用UG/Motion的功能给蛋皮机三维实体模型的各个部件赋予一定的运动学特性,建立运动仿真模型[5]。通过对蛋皮机运动机构的装配分析和运动合理性分析,验证了运动机构设计是合理的,运动解算方案求解操作结果如图7所示。
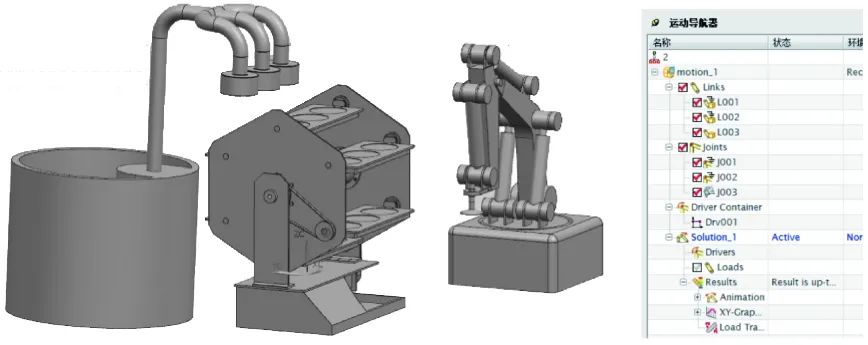
图7 运动解算方案求解操作结果图
5 结语
文中阐述了全自动蛋皮机的设计方案,主要对蛋皮机主体部分进行结构设计和三维建模,并对三大部件动力源装置、蛋皮机主体、机械手抓取装置进行装配和运动仿真,说明了蛋皮机的整个工作过程,并对蛋皮机主要部件进行有限元分析。通过以上仿真实验,说明此蛋皮机理论设计可行。在实际的生产转化过程中,根据所遇到的问题,还可以进一步优化。
猜你喜欢
机械设计与制造(2022年10期)2022-10-12
煤(2022年6期)2022-06-13
食品工业科技(2022年12期)2022-06-11
中国金属通报(2020年21期)2020-12-09
科技与创新(2020年15期)2020-08-12
食品与健康(2020年7期)2020-07-09
家庭影院技术(2019年12期)2020-01-19
汽车零部件(2018年11期)2018-12-08
中国计算机报(2018年13期)2018-05-23
饮食科学(2017年7期)2017-09-03