
威尔伯福斯摆的耦合运动研究
2022-09-28 01:04邓欣雨张天宇陆建隆
大学物理 2022年9期
邓欣雨,张天宇,陆建隆,钟 鸣,王 巍
(1. 南京师范大学 物理科学与技术学院,江苏 南京 210023;2. 南京师范大学 教师教育学院,江苏 南京 210023)
威尔伯福斯摆(以下简称韦氏摆)的奇特振荡现象是1894年威尔伯福斯观察到的,并以其名字命名[1]. 韦氏摆由上端固定的螺旋弹簧和连接在弹簧下端的物体(通常称为摆锤)组成,竖直拉伸韦氏摆并从静止释放后,出现竖直方向振荡和水平方向周期性来回旋转的现象,竖直振荡的振幅逐渐减小,水平最大旋转角度逐渐增大,直到竖直振荡的振幅达到最小时,水平最大旋转角度达到最大. 之后竖直振荡的振幅逐渐增大,水平最大旋转角度逐渐减小,直到竖直振荡的振幅达到最大,同时水平最大旋转角度达到最小,韦氏摆以此规律进行周期性运动.
与韦氏摆不同,竖直悬挂的弹簧振子是一个不考虑摩擦阻力、不考虑弹簧的质量、不考虑摆锤的大小和形状的理想化物理模型,摆锤只沿竖直弹簧轴线做简谐振动. 当摆锤具有一定的形状时,整个系统的振动状态发生了改变,摆锤的转动惯量是不可忽略的因素,此时弹簧振子的振动就是韦氏摆的振动状态.
1990年Richard E. Berg首次提出了韦氏摆的运动方程,从理论上证明韦氏摆的运动状态是竖直运动和水平运动的耦合[2]. 所谓耦合即两种运动状态相互关联、相互影响,后人对韦氏摆的研究多基于这篇论文中的理论. 2008年许裕栗通过对弹簧伸长和摆锤扭转关系的分析,间接探究了竖直和水平方向受力间的传递关系,提出“传递力”概念,以量化两垂直方向运动耦合的强弱[3]. 2019年Pierre Devaux对韦氏摆的运动状态在纯平移和纯旋转之间周期性切换的特殊情况进行了分析,并通过傅里叶分析实验数据,发现此现象中平移和旋转以相同的频率振荡[4]. 但是,在韦氏摆的实际运动过程中,无论是运动状态还是振荡频率都是复杂多变的.
本文首先从力学角度解释韦氏摆的运动耦合现象,并使用分析力学对韦氏摆的运动进行理论分析得到韦氏摆的运动方程. 在理论分析的基础上,通过设计实验装置,并采用双机位拍摄的实验方法,发现逐渐增大韦氏摆摆锤的转动惯量,其竖直振荡频率和水平扭转频率的数值差距由小变大,且韦氏摆依次会出现强耦合状态、弱耦合状态和近似不耦合状态三种运动状态,并探究了转动惯量对韦氏摆运动的影响;采用控制变量法探究弹簧初始伸长量对韦氏摆运动的影响.
1 理论分析
1.1 韦氏摆系统受力、力矩分析
如图1(a)所示,韦氏摆由弹簧和摆锤相连接而成. 通过对韦氏摆受力分析,可定性了解韦氏摆竖直运动和水平运动间耦合的原因. 图1(b)分析了弹簧和摆锤相连接处摆锤的受力情况(图中的接触点,距离转轴为r). 弹簧丝中存在沿簧丝轴线的力F‖和沿簧丝横截面的切应力F⊥[5],将摆锤竖直拉离平衡位置并静止释放的瞬间,由于弹簧的拉伸作用,与摆锤固定处弹簧丝的切线与水平面成一定的夹角,此时F‖的竖直分力与F⊥的竖直分力之和大于摆锤重力,3个力的合力为竖直方向的回复力,驱使摆锤回到竖直平衡位置,从而发生竖直方向的振荡;F‖的水平分力与F⊥的水平分力的作用线与转轴不在同一平面内,且F‖的水平分力大于F⊥的水平分力,因此存在两个大小不等、方向相反的力矩的作用,两个力矩的合力矩为水平方向的回复力矩,方向沿逆螺旋方向,回复力矩驱使摆锤沿逆螺旋方向转动,当转动到F‖的水平分力等于F⊥的水平分力时,回复力矩为零,到达水平平衡位置,但由于惯性,摆锤继续转动,此时F‖的水平分力小于F⊥的水平分力,产生顺螺旋的回复力矩,从而形成水平方向的振荡.由于竖直方向的振荡和水平方向的振荡同时进行,二者同时影响弹簧丝中的F‖和F⊥的大小和方向,同时影响F‖和F⊥在水平和竖直方向的分力,即竖直方向的回复力会受到水平振荡的影响,水平方向的回复力矩也会受到竖直振荡的影响,从而形成竖直方向运动与水平方向运动的相互耦合.

平衡状态 韦氏摆离开平衡位置并由静止释放的瞬间图1 韦氏摆受力分析图
同样也可以仅给韦氏摆一个初始旋转角度或以竖直拉伸和水平旋转相结合的方式启动韦氏摆,运动出现耦合的原因均为F‖的竖直分力、F⊥的竖直分力和摆锤重力的合力使摆锤产生竖直方向的振荡,F‖的水平分力与F⊥的水平分力的合力使摆锤发生水平方向的振荡,又两个方向的运动相互影响对方的回复力或回复力矩,从而形成竖直方向运动与水平方向运动的相互耦合.
1.2 韦氏摆系统角振幅θ(t)和竖直振幅z(t)随时间变化的理论分析
首先构建韦氏摆的理论模型,假设韦氏摆在无阻尼的理想情况下运动,螺旋弹簧为轻质弹簧,忽略弹簧自重对摆锤运动的影响.假设韦氏摆的摆锤始终在一条竖直直线上运动,即忽略摆锤的圆锥运动;假设竖直方向上的运动与水平方向上运动的耦合方式为线性耦合,该种耦合方式已被广泛地接受并采用[2,4,6,7].
将韦氏摆简化为二自由度系统,如图2所示,以韦氏摆处于平衡位置时摆锤质心所在位置为坐标原点,以弹簧轴线所在直线为竖直轴,竖直向下为正方向建立坐标系,z为运动过程中摆锤质心所在的竖直位置,z(t)用于描述摆锤竖直方向上的运动;在摆锤底部用黑点做一个标记,以摆锤质心为坐标原点,以平衡状态下摆锤的质心与黑点连线为极轴,θ为运动过程中质心-黑点连线与极轴所成的夹角,θ(t)用于描述摆锤水平方向上的运动.

图2 韦氏摆系统两个自由度:z、θ
使用分析力学对韦氏摆的运动进行理论分析.韦氏摆系统的拉格朗日函数为[1]
(1)
由拉格朗日函数得到系统的拉格朗日方程为
(2)
(3)
设系统的初始条件为韦氏摆静止释放,即
解上述方程得到竖直位置与时间的关系式为
z(t)=Acosω1t+Bcosω2t
(4)
其中,
(5)
(6)
其中,
(7)
(8)

水平旋转角度θ与时间t的关系式为
θ(t)=Ccosω1t+Dcosω2t
(9)
其中

(10)
由式(7)、(8)、(10)可知,当ωz、ωθ数值相近时,可以满足ω1与ω2相差不大,且ω1-ω2与ω1+ω2的比值很小的条件,由于ω1与ω2的方程较为复杂,而ωz与ωθ更易计算,因此,可以通过比较ωz、ωθ的数值,更方便地判断韦氏摆的竖直振荡与水平振荡是否会出现振幅随时间发生强弱周期性变化.
2 实验探究
2.1 实验装置及参数测量
如图3所示,选用中间为100 g的砝码、两侧为1 g的砝码和质量为0.4 g的木板作为韦氏摆的摆锤,改变两侧小砝码的位置以改变振子的转动惯量.选用各参数如表1所示的螺旋弹簧进行实验,计算得弹簧的劲度系数为k=2.518 N/m,扭转系数为δ=1.521×10-4.使用热熔胶枪使螺旋弹簧的下端与摆锤固定,螺旋弹簧的上端通过铁架台固定.为了观察振子的运动情况及记录参数,设置双机位拍摄,仰视机位于韦氏摆的正下方,用于记录韦氏摆水平方向的运动,正视机位于韦氏摆平衡位置所处的水平面中,用于记录韦氏摆竖直方向的运动.将拍摄到的视频导入tracker软件中进行打点分析,得出韦氏摆的振动曲线.考虑到螺旋弹簧并非轻质弹簧,在计算ωz、ωθ时,质量m取摆锤质量加三分之一的弹簧质量,转动惯量取摆锤的转动惯量加三分之一的弹簧转动惯量.
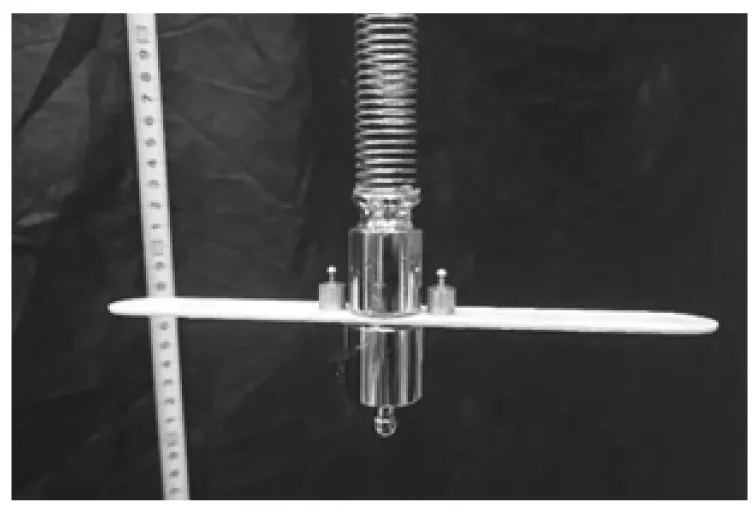
图3 实验装置实拍图


2.2 探究摆锤转动惯量对韦氏摆耦合状态影响
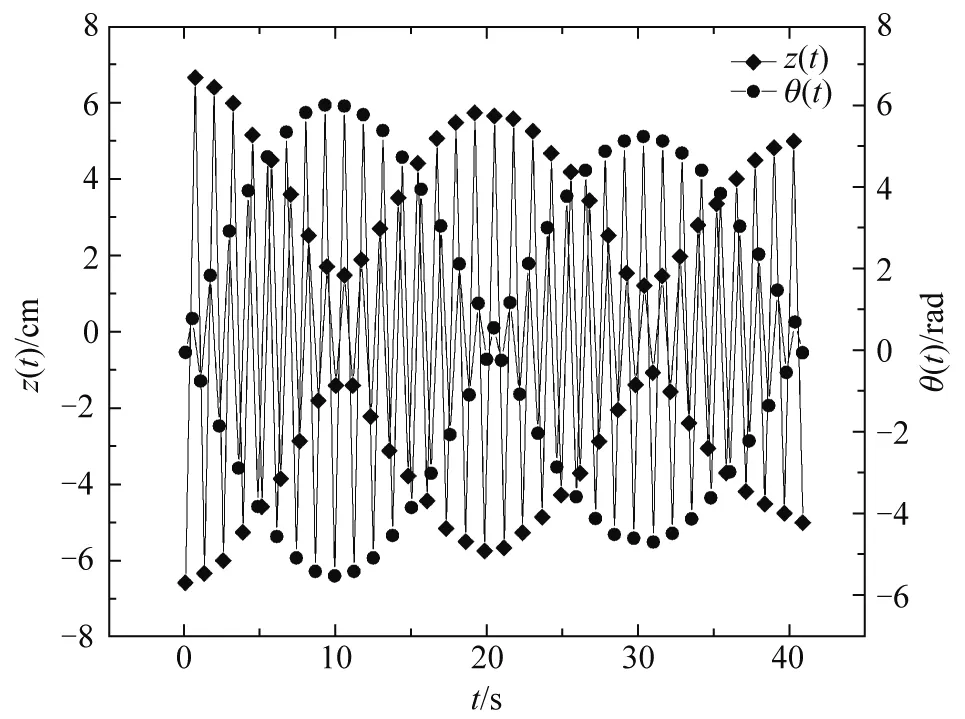
2.2.1 强耦合状态


实验曲线
2.2.2 弱耦合状态
当ωz、ωθ的数值差距增大时,韦氏摆的竖直振荡的振幅或水平振荡的振幅随时间发生强弱周期性变化程度减弱.调整图3中小砝码的位置,当摆锤的转动惯量为6.532×10-6kg·m2时,ωz=4.908 rad/s、ωθ=4.825 rad/s,ωz、ωθ的数值差距增大,韦氏摆的耦合状态会相比强耦合状态减弱.同样以仅给予初始伸长量的方式启动韦氏摆(即给予竖直方向一定的能量),并获取竖直方向和水平方向的运动曲线,如图5(a)所示,当韦氏摆水平振动振幅达到最大时,竖直振动振幅到达最小值但不为零;当韦氏摆水平振动振幅达到最小时,竖直振动振幅到达最大值,即当水平方向的能量达到最大时,竖直方向的能量不为零,即竖直方向的能量向水平方向的能量转移不完全,因此,在该实验的条件下,两个方向的运动的相互影响程度较弱,故称为弱耦合状态.
同样将测量所得的实验参数代入到z(t)和θ(t)的方程中,并绘制出该条件下的理论曲线,其中耦合系数ε=0.002 52.图5(b)为韦氏摆竖直振动振幅z(t)与水平振动振幅θ(t)的理论曲线.将绘制出的理论曲线与实验曲线进行对比,在t=10 s和t=30 s左右,韦氏摆的竖直振荡振幅均达到最小值,大约为1.8 cm,水平振荡振幅均达到最大;在t=20 s左右,韦氏摆的竖直振荡振幅均到达最大值,水平振荡振幅均为0.实验曲线与理论曲线中在一个“拍”内,竖直运动和水平运动均为振荡16次.理论与实验符合良好.
实验曲线
2.2.3 近似不耦合状态
当摆锤的转动惯量为15.215×10-6kg·m2时,ωz=4.908 rad/s、ωθ=3.162 rad/s,ωz、ωθ的数值差距明显,韦氏摆的竖直振荡的振幅与水平振荡的振幅不再出现随时间发生强弱周期性变化的情况.观察实验现象发现,韦氏摆仅发生上下振动与水平转动中的一种运动,即给予韦氏摆一个竖直拉伸并静止释放后,韦氏摆仅做竖直振动,几乎不发生绕轴旋转;当给予韦氏摆一个水平旋转角度并静止释放后,韦氏摆仅做绕轴旋转,几乎不发生竖直振动,即水平方向的能量几乎不向竖直方向转换,竖直方向的能量几乎不向水平方向转移,因此,在该实验的条件下,两个方向的运动几乎不相互影响,故称为近似不耦合状态.将测量得到的实验参数代入到z(t)和θ(t)的方程中,并用Matlab绘制出理论曲线,由于实验中并没有观察到振幅周期性变化的现象,无法获取“拍”周期对耦合常数进行测量,代入耦合系数ε=0.002 52进行拟合,如图6所示,可以观察以给予竖直伸长量的方式启动时,水平振荡的最大振幅很小,并且考虑到实际实验中存在阻尼作用,因此几乎观察不到该种运动的出现.

图6 近似未耦合状态理论曲线
2.2.4 转动惯量对韦氏摆运动的影响分析
下面探究摆锤的转动惯量对韦氏摆的水平振荡的影响.以仅给予竖直初始伸长量的方式启动韦氏摆,随着摆锤转动惯量的增加,韦氏摆的水平振荡曲线如图7所示.图7(a)为摆锤的转动惯量为7.664×10-6kg·m2的旋转角度随时间变化曲线,可以看出曲线的线条较为密集,若多条类似的曲线重叠在一起难以分辨,因此,图7(b)绘制出旋转角度随时间运动曲线的包络线.

7.664×10-6 kg·m2旋转角度随时间变化曲线

图8 扭转振荡频率与转动惯量的关系图
2.3 实验探究强耦合状态下初始条件韦氏摆运动状态的影响
在强耦合状态下研究弹簧初始伸长量对韦氏摆运动状态的影响.以仅给予韦氏摆初始伸长量的方式启动韦氏摆,改变初始伸长量,探究初始伸长量对韦氏摆运动的影响.获取运动曲线图,如图9所示.

初始伸长量为3.20 cm的竖直运动曲线
图9(a)为初始伸长量为3.20 cm的实验条件下的韦氏摆竖直运动曲线,多条类似的曲线重叠会难以分辨,因此同样绘制出竖直运动曲线的包络线便于观察,如图9(b)所示.由图9(b)可见,当给予韦氏摆不同的初始伸长量时,韦氏摆的振动频率几乎没有发生变化,而初始伸长量越大,韦氏摆的振动振幅越大.
由对强耦合情况的分析可知,韦氏摆竖直振动振幅z(t)与水平振动振幅θ(t)随时间t变化曲线的形状及规律相同,因此仅对竖直振荡曲线进行分析,以方程(4)即z(t)中的系数A、B作为研究对象进行探究.将视频导入到tracker中逐帧打点获得韦氏摆的竖直运动曲线.对竖直运动曲线进行傅里叶变换,得到z(t)中的ω1和ω2,将得到的两个数据作为初始值对运动曲线进行拟合得到对应的系数A和B,以获取更加准确的数据.
在此对所使用的拟合曲线进行说明.在实验过程中,由于空气阻力、铁架台固定端的轻微振动、韦氏摆发生椭圆摆运动等因素影响,韦氏摆的最大振幅会出现衰减现象,但是如果详细考虑各因素的影响,仅空气阻力就存在两个阻尼系数,理论分析将会十分复杂,因此对这些因素的影响进行简化,只考虑振幅的指数衰减,而忽略阻尼对振荡频率的影响,即使用z(t)=[Acos(ω1t)+Bcos(ω2t)]e-βt对运动曲线进拟合[4].
为验证假设的合理性,绘制出韦氏摆运动过程竖直振荡频率随时间的变化图像,由于视频拍摄的帧率为50帧/s,获取的振荡周期存在一帧左右的误差,即0.02 s左右的误差,由图10可知,在误差允许的范围内,振荡频率没有随时间发生明显的变化,因此认为假设是合理的.

图10 频率散点图
对方程(5)、(6)进行分析,由ω1、ω2、ωz、ωθ的方程可知,当韦氏摆系统中的弹簧和摆锤确定后,ω1、ω2、ωz、ωθ便相应确定,它们的数值均与初始伸长量z0无关,因此由方程(5)、(6)可知初始伸长量与叠加系数A、B均呈一次函数关系,将实验参数代入理论公式(5)、(6)中,得到图11(a)、(b)中的实线,即理论曲线,实验数据与理论曲线拟合较好.

系数A
2.4 误差分析
在进行实验探究初始伸长量对韦氏摆运动行为的影响时,在给予韦氏摆初始伸长量的同时,可能会同时给予韦氏摆初始旋转角度,但是这个初始旋转角度在5度以内对实验探究结果影响较小;并且在实验中韦氏摆在水平方向上不仅是绕轴旋转,还会发生圆锥摆运动,本文进行了多次实验,选取椭圆摆运动幅度较小的实验进行分析处理,但是后续也可以进行韦氏摆系统的三维分析,对椭圆摆运动加入研究.当摆锤较重时,铁架台的固定端也会发生小幅度的振动,对实验的影响较小.
3 结论
本文利用分析力学对韦氏摆的运动进行了理论分析.研究发现,耦合系数决定了韦氏摆竖直和水平两个方向运动的耦合程度,而耦合系数与摆锤的竖直方向运动振动频率和水平方向的旋转振荡频率有关,即耦合系数与摆锤的转动惯量、质量和弹簧的外径、线径、材料有关.实验研究了摆锤转动惯量对韦氏摆耦合状态的影响.通过实验验证了增大摆锤转动惯量,韦氏摆会出现三种不同的耦合状态,并从能量角度分析了三种耦合状态的本质区别.通过将韦氏摆的实验运动曲线与理论运动曲线对比,验证了理论的正确性.验证了韦氏摆的竖直振动频率及水平旋转频率与摆锤的转动惯量近似成反比,与初始启动条件无关.初始条件决定了韦氏摆的振荡振幅,但是不改变韦氏摆的运动状态,初始伸长量越大,韦氏摆振荡的最大振幅越大.
致谢:感谢南京师范大学物理竞赛指导团队张开杨、庄伟、俞之舟、袁启荣老师在课题研究中的指导,感谢郭嘉钰、张玲、徐蕾、杨友为等同学对该课题研究的帮助.
猜你喜欢
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
发明与创新(2022年24期)2022-06-14
发明与创新·小学生(2022年8期)2022-06-13
辽宁丝绸(2021年2期)2021-12-23
动漫界·幼教365(中班)(2021年6期)2021-07-21
防爆电机(2021年3期)2021-07-21
汽车实用技术(2019年18期)2019-09-26
物理与工程(2019年2期)2019-07-09
环球时报(2017-12-14)2017-12-14
传奇故事(破茧成蝶)(2017年5期)2017-11-15
