
威尔伯福斯摆运动模式的研究
2022-09-28 01:04王世航张嘉宁李书光
大学物理 2022年9期
王世航,张嘉宁,周 伟,李书光,李 静,王 龙
(中国石油大学(华东) 理学院,山东 青岛 266580)
威尔伯福斯摆由悬挂在竖直方向的螺旋弹簧和连接在弹簧末端的摆锤组成,其结构如图1所示.摆锤既能在竖直方向上下振动,又能绕其竖直轴扭转摆动[1].Ronald Geballe通过对弹簧的动力学和静力学分析,给出了螺旋弹簧的扭转和伸长之间的关系[2].许裕粟等从螺旋弹簧的角度,解释了威尔伯福斯摆共振产生的机理,并通过实验得到弹簧扭转和伸长之间的线性关系[3],但未给出其耦合共振运动学方程的详细描述.Richard E. Berg等使用拉氏能量函数求解出振动方程,并定量的给出了共振性能量转化的关系[4],但未详细探究系统的耦合共振现象.
本文通过对威尔伯福斯摆进行相应的受力、力矩分析,得出其上下振动和绕竖直轴扭转摆动的耦合共振方程,并通过求解分析了其影响因素;最后基于PASCO传感器进行实验探究,研究结果表明,摆锤的两种运动之间存在能量共振性转化的过程,摆锤的转动惯量会对摆锤的运动状态产生影响,其两种振动的耦合导致了“拍”现象的出现.
1 理论分析
如图1所示,假设一密度均匀、质量为m的摆锤,悬挂于一个轻质弹簧(劲度系数为k)下.当摆锤拉离平衡位置,从某一位置释放,摆锤跟随弹簧的伸长上下振动,并绕竖直方向扭转摆动.设其扭转系数为δ,建立空间直角坐标系,其中x、y轴平行于地面,z轴垂直于地面;对于弹簧来说,簧丝的切线方向与水平面存在夹角,该角为弹簧的倾角[5].倾角的存在使得弹簧在竖直方向拉伸时,产生一个微小的扭矩;而当弹簧扭转时,又会产生竖直方向上微小的拉力[6].
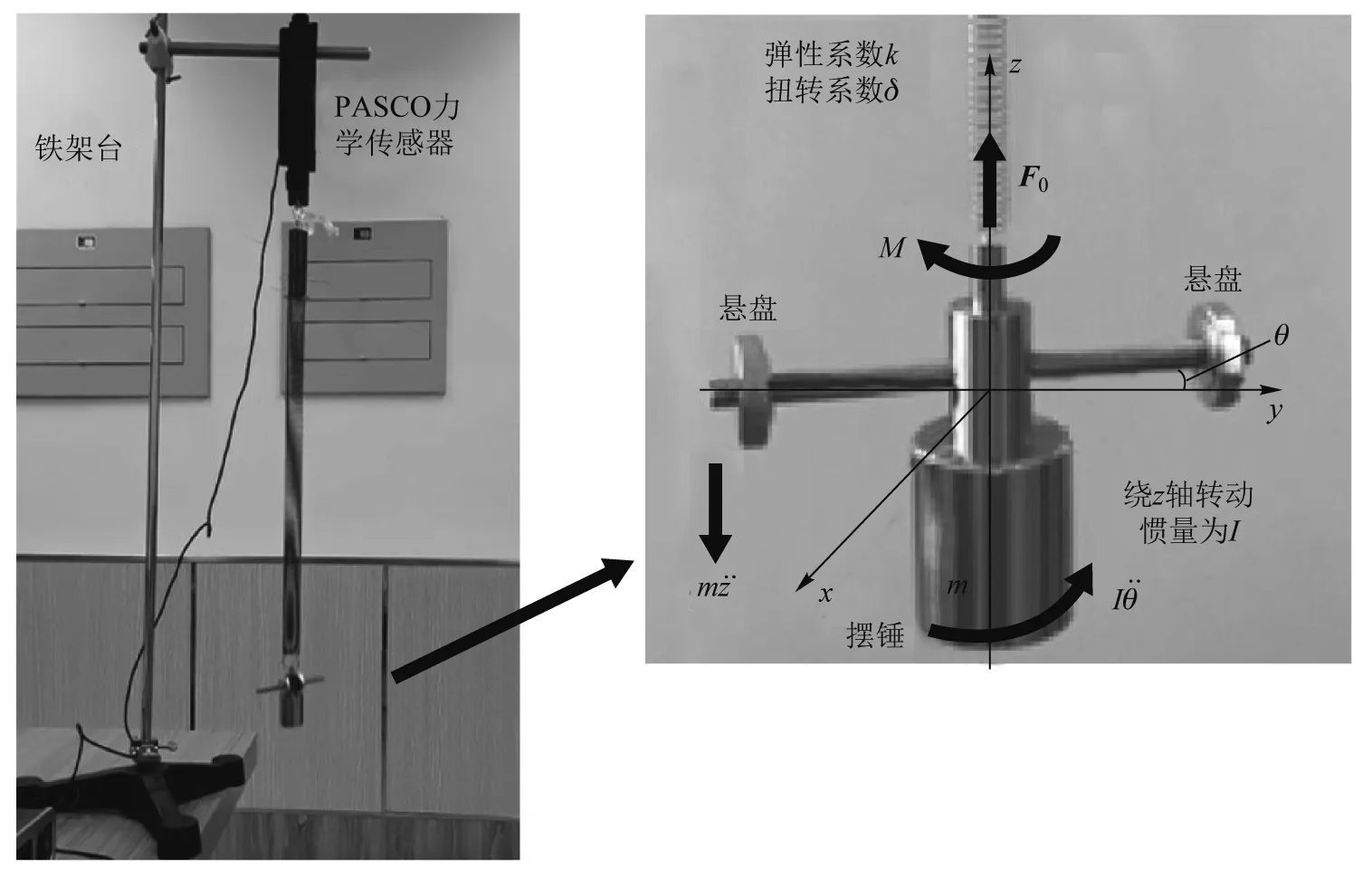
图1 威尔伯福斯摆受力分析图
根据牛顿第二定律和转动定律,取摆锤在重力作用下静止时的位置为坐标原点,对摆锤进行相应的受力和力矩分析:
(1)

(2)
其中,扭转力矩为M=-δθ+f(z),竖直方向的合外力F0=-kz+f(θ).根据参考文献[3],f(z)和f(θ)取一阶的线性函数[3],即
F0=-kz+aθ
(3)
M=-δθ+bz
(4)
其中a、b为修正参数,由弹簧的材质、线径等决定,aθ和bz为线性耦合项.将其代入式(1)、(2)得

(5)

(6)
对式(5)再进行时间的二阶微分,并将得到的式子与式(6)进行联立,同时消除θ得到关于z的微分方程:
(7)
同理,可得关于θ的微分方程:
(8)
对式(8)进行求解,假设通解为[7]
θ(t)=Aeiωt
(9)
为了得到ω的表达式,将式(9)代入式(8)得到
(10)

对式(10)进行求解,可以得到
当ωθ=ωz时,上面两式相等,此时式(10)仅有一个根.为方便求解计算,将式(9)转换成三角函数形式,即
θ(t)=Asinω1t+Bcosω1t+Csinω2t+Dcosω2t
(11)

z(t)=
(12)
同理,也可得θ(t):
(13)
2 理论可视化
式(12)和(13)分别为威尔伯福斯摆的上下振动和扭转摆动的运动学方程,可以发现两种运动的幅度变化与ωθ和ωz有关,ωθ、ωz实际为扭转摆动和上下振动的固有频率[9],从理论中可以看出两个固有频率的关系影响着摆锤的运动.受实验条件限制,通过改变摆锤的转动惯量(即改变摆锤上悬盘的位置),探究两个固有频率的变化如何影响摆锤的运动模式.

图2 确定参数a时,竖直伸长量随扭转角度变化曲线
弹簧的参数为k=0.48 N/cm、δ=0.54 N/(°).为确定式(3)、(4)中修正参数中a、b的值,保持摆锤在平衡位置处不动,记录此时对应的弹簧拉力F.扭转摆锤到所需要的角度,记录不同扭转角度对应下的弹簧拉力,得到弹簧拉力的变化量.通过弹簧的弹性系数计算得到相对应的伸长量,绘制弹簧伸长量随扭转角度变化的曲线,如图2所示;将细线一端固定于摆锤底部的中心位置,细线下端穿过硬纸板中心,从摆锤的平衡位置开始缓慢竖直拉动细线,每隔5 cm在硬纸板上测量摆锤摆过的角度θ,绘制扭转角度随弹簧竖直伸长量变化的曲线,如图3所示.

图3 确定参数b时,扭转角度随竖直伸长量变化曲线

初始条件为z0=10 cm,θ0=0°,摆锤的重量为m=0.27 kg,当摆锤的转动惯量I=0.30 kg·cm2时,系统近似有k/m=δ/I.为判断扭转摆动和上下振动的固有频率对系统运动模式的影响,令不同转动惯量的差值为ΔI=0.01 kg·cm2,基于Matlab做出θ(t)和z(t)在摆锤转动惯量不同的情况下随时间变化的曲线,如图4所示.

图4 方程理论可视化
当竖直振动z(t)幅度达到最大时,扭转摆动θ(t)幅度达到最小,幅度越大代表着能量越大,即两种运动之间存在能量共振性转化的过程[10].如图4中箭头所指,当二者固有频率相等时(曲线3),相比于其它,幅度最大值和最小值相差最大,幅度的变化最为明显,出现类似于“拍”的现象,此时即为系统的耦合共振状态.依次观察曲线1、曲线2、曲线3的“拍”现象,可以发现“拍”现象越来越明显,故“拍”现象在耦合共振状态最为明显.
3 进一步探究
3.1 弹簧振动的运动模式
为进一步验证以上推导,采用PASCO力学传感器将弹簧与铁架台固定,计算机可显示弹簧力F随时间的周期性变化,装置如图1所示.使用长度为30 cm、内径为1 mm、外径为24 mm的螺旋弹簧,下落标度为卷尺50 cm处,得到力学传感器的拉力曲线;由于弹簧拉力与伸长量之间为线性关系,本文实验中用弹簧拉力数据表征弹簧的伸长量变化.将PASCO力学传感器得到的数据导入到Origin进行绘图,得到如图5所示的变化曲线.

图5 弹簧拉力表征弹簧伸长量随时间变化曲线
在摆锤的运动过程中,螺旋弹簧伸长量(图中弹簧拉力F)的幅度呈现周期性变化,类似于“拍”的现象,峰值随时间变化呈减小趋势,且与理论曲线图的频率一致(实验曲线的纵坐标需要一定的线性转化);实验曲线存在峰值减小的现象,这是由于外界阻力如空气阻力、摩擦等对系统的影响.实验进行的时间较短,可认为系统是存在低阻尼的情况,理论推导中忽略了阻力,故与实验曲线存在差异.从图4和图5的对比中,实验曲线与理论分析曲线的趋势基本吻合,证明了理论推导的正确性.
3.2 系统的能量转化
在记录螺旋弹簧伸长量的同时,用高速摄像机(120帧/s)记录摆锤扭转;视频分析软件Tracker的分析追踪过程如图6所示.将PASCO力学传感器得到的数据和视频分析软件追踪得到的数据导入Origin进行绘图,得到弹簧的扭转角度和伸长量(等效为弹簧拉力F)随时间变化的曲线,如图7所示.

图6 视频分析软件追踪过程

图7 弹簧拉力(上)和摆锤扭转角度(下)随时间变化曲线
在摆锤的运动过程中,在同一时刻,当螺旋弹簧竖直振动的幅度达到最大时,扭转摆动的幅度达到最小,当螺旋弹簧竖直振动的幅度达到最小时,扭转摆动的幅度达到最大,证明两种运动之间存在能量共振性转化的过程.
3.3 改变摆锤的转动惯量,寻找系统耦合共振点

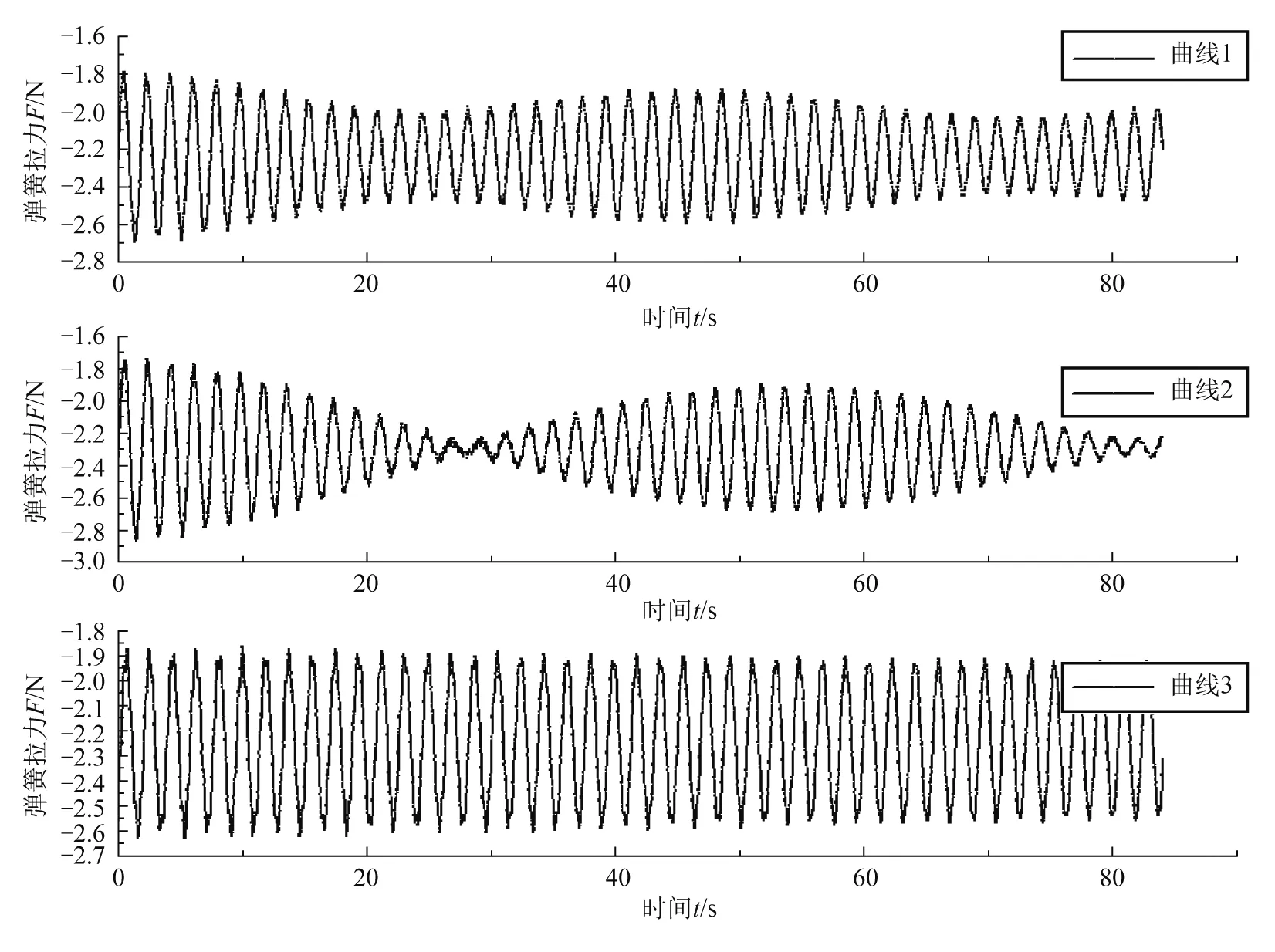
图8 改变悬盘位置得到不同的弹簧拉力变化曲线
图8中,随着摆锤的转动惯量逐渐增大,摆锤幅度变化由不明显到明显,再到不明显;在特定位置点,存在幅度变化最明显,曲线2所对应的悬盘位置,即为系统的耦合共振点.
当系统远离共振点时,摆锤运动状态的“拍”现象变得不明显,甚至到某一位置(曲线3处)后,便不再出现“拍”现象,产生该现象的原因可能为:ωz和ωθ的差值过大,导致系统竖直振动达能量最高值处与扭转摆动达能量最低值处在同一时刻不能完全对应,而系统的耦合项是不变的,这就导致两种振动之间的相互影响变小.当两个固有频率的差值近似为无穷大时,摆锤的运动模式可完全看成两个独立的运动:竖直振动和扭转摆动.
4 结束语
本文对威尔伯福斯摆的运动进行了理论和实验的探究,理论上建立了威尔伯福斯摆运动的耦合共振数学模型,同时基于PASCO实验系统搭建了威尔伯福斯摆系统,通过拉力表征弹簧伸长量,进行了基本的实验探究,研究结果表明理论分析与实验结果是一致的.该方法和思路对于复杂结构耦合共振的动力学分析具有一定的实际借鉴意义.
猜你喜欢
山东商业职业技术学院学报(2022年5期)2022-11-03
发明与创新(2022年24期)2022-06-14
发明与创新·小学生(2022年8期)2022-06-13
动漫界·幼教365(中班)(2021年6期)2021-07-21
小学生(看图说画)(2019年10期)2019-10-14
小学生(看图说画)(2019年10期)2019-10-14
汽车实用技术(2019年18期)2019-09-26
百家讲坛(2019年17期)2019-01-08
当代陕西(2018年12期)2018-08-04
消费导刊(2017年23期)2018-01-15
