附加质量及惯性矩对于大型飞艇气动性能和开环控制响应的影响
2022-10-08 10:45陶善聪张石玉时晓天周江华
弹道学报 2022年3期
陶善聪,吕 达,张石玉,吕 蒙,时晓天,周江华
(1.中国航天空气动力技术研究院,北京 100074;2.中国科学院 光电研究院,北京 100094)
平流层飞艇在空中预警、通讯中继、导航定位和环境监测等方面有重要的军用、民用价值,并具有应用潜力,受到了研究人员的普遍关注。大型飞艇在平流层低速飞行时,由于黏性效应带动周围的空气一起运动,由此产生空气对飞艇的反作用力,可形成附加在飞艇表面的附加质量或者附加力矩。附加质量的获取方法有工程估算、风洞试验和数值模拟等手段,其中数值模拟因具有计算精度高、模拟成本小、周期短等优势而获得广泛应用。
已有的研究结果表明,对于大型飞艇,其自身惯性所引起的附加质量和力矩可能严重影响飞艇气动特性和操控特性。刘丹等通过Hess-Smith方法数值计算了飞艇在平流层运动时的附加质量,指出附加质量对飞艇运动具有较大影响,不能随意假设。马烨等对比分析了CFD(computational fluid dynamic,CFD)方法、理论方法和Hess-Smith方法计算标准模型椭球的附加质量,结果表明CFD方法计算方便,精确度较高,并且将此方法推广到计算复杂飞艇外形的附加质量。柯艺杰等借助工程估算和实验辨识两种方法分析平流层飞艇的俯仰附加转动惯量,结果表明两者计算结果都可以满足工程设计的要求,但经验公式估算的结果相对偏小。张文琦等利用CFD方法考虑附加质量作用下浮升混合飞艇的运动性能,指出附加质量效应对浮升混合飞行器的操纵性存在显著影响。
本文基于六自由度非定常匀加速和重叠网格CFD技术,首先针对椭球标模开展了附加质量计算方法验证。针对倒Y型尾翼布局的大型飞艇,开展了附加质量和附加力矩的数值模拟,得到了飞艇平动和转动的附加质量和力矩;分析了布局形式对于沿轴、轴平动的附加质量、转动的附加力矩的影响差异;通过飞行动力学仿真手段,考察了附加质量和力矩对于飞艇开环控制响应的影响。
1 数值方法及算例验证
1.1 数值方法
针对三维不可压缩流动的RANS(Reynolds-averaged Navier-Stokes,RANS)控制方程,本文采用有限体积法开展SST-湍流模型的非定常数值模拟,基于二阶隐式方法实现时间推进。采用背景网格静止、内域网格运动的重叠网格技术模拟飞艇的平动和转动,开展附加质量和力矩的数值计算。附加质量和力矩的计算公式为
(1)
(2)
式中:和分别为物体匀加速运动下的力与力矩,和分别为物体匀速运动下的力与力矩,和分别为平动和转动的加速度。
1.2 算例验证
针对椭球标模(2=20 m,2=2=5.333 m,=1.225 kg/m)开展附加质量和力矩的数值计算,并通过与附加质量的理论值和基于Hess-Smith方法获得的预测结果进行对比,验证计算方法的预测精度。计算网格如图1所示,网格规模为200万网格单元。
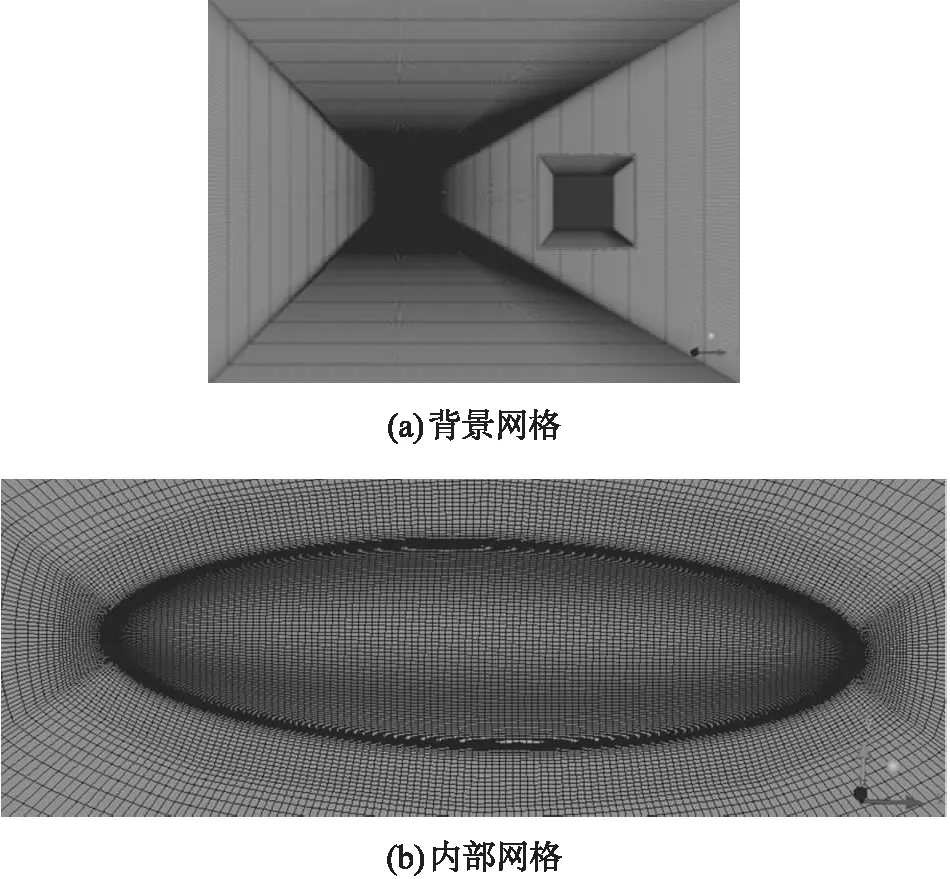
图1 椭球网格示意图
对于平动,开展来流速度1 m/s、0攻角的定常流场计算,在此基础上赋予椭球一个1 m/s的匀加速度前向运动,由式(1)获得附加质量。对于转动,设置椭球在静止流场中以1 rad/s匀加速转动,转动中心为椭球中心,由收敛的力矩和式(2)求得其附加力矩。图2为模型表面的压力和对称面上的流线分布图。图2(a)的加速前向运动结果表明流动无分离,高压区和低压区分别出现在头部和尾部。图2(b)表明流场关于椭球中心成旋转对称分布,线速度与半径成正比。高压区出现在椭球的左下角和右上角,低压区出现在左上角和右下角。
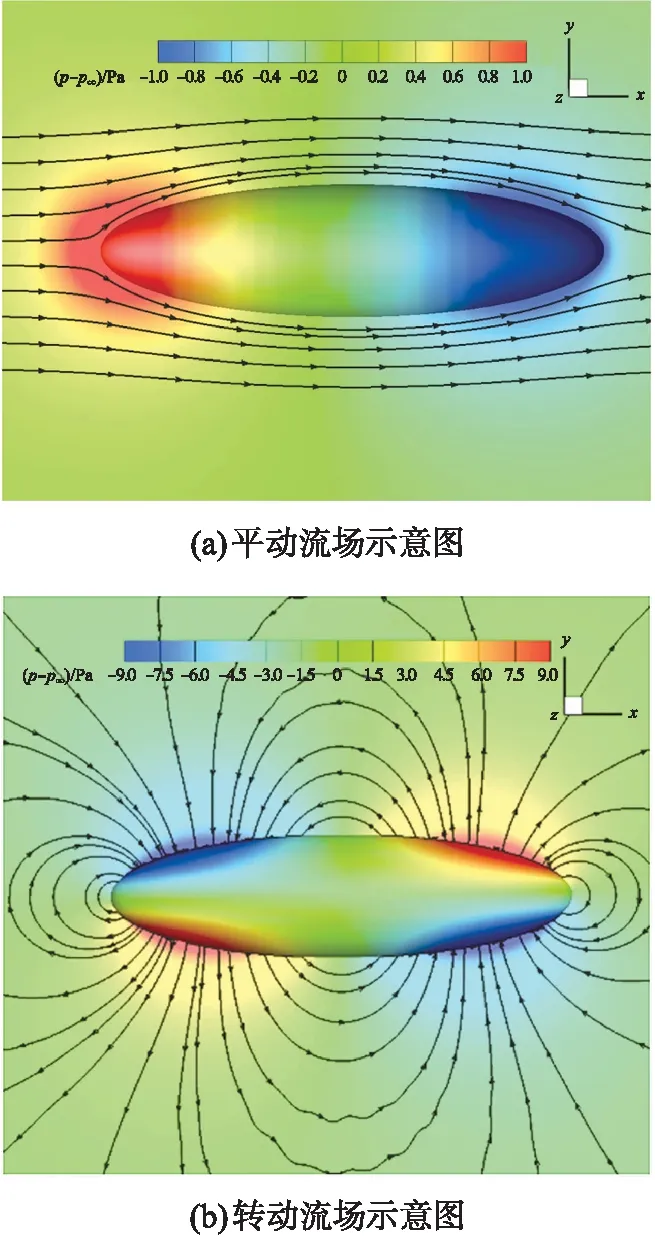
图2 椭球匀加速运动
表1给出了本文计算值与理论值等结果的对比。由表1可见,当前计算结果,平动附加质量与理论值误差不超过0.3%,转动附加力矩预测误差不超过4%,当前的数值计算方法具有较高的可靠性。
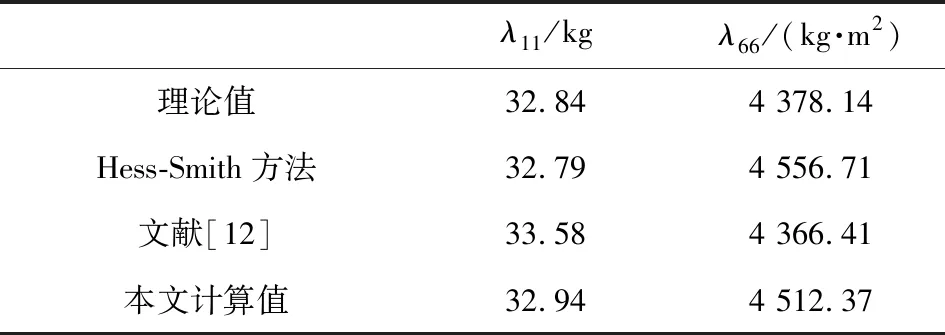
表1 椭球附加质量计算结果对比
2 飞艇附加质量计算
2.1 飞艇模型及计算条件
图3所示为本文所考察的倒Y型尾翼布局的大型飞艇示意图。计算网格如图4所示。图4(a)为背景网格,域长、宽、高均为飞艇轴长的20倍,网格量为630万,对应静止域的计算;图4(b)为内域网格,域长、宽、高均为飞艇轴长的4倍,网格量为520万,对应运动域的计算,静动域界面网格数据交换由插值方法得到。计算参数见表2,表中,为来流静压,为来流密度,为来流速度,为参考长度,为参考面积。

图3 飞艇模型示意图
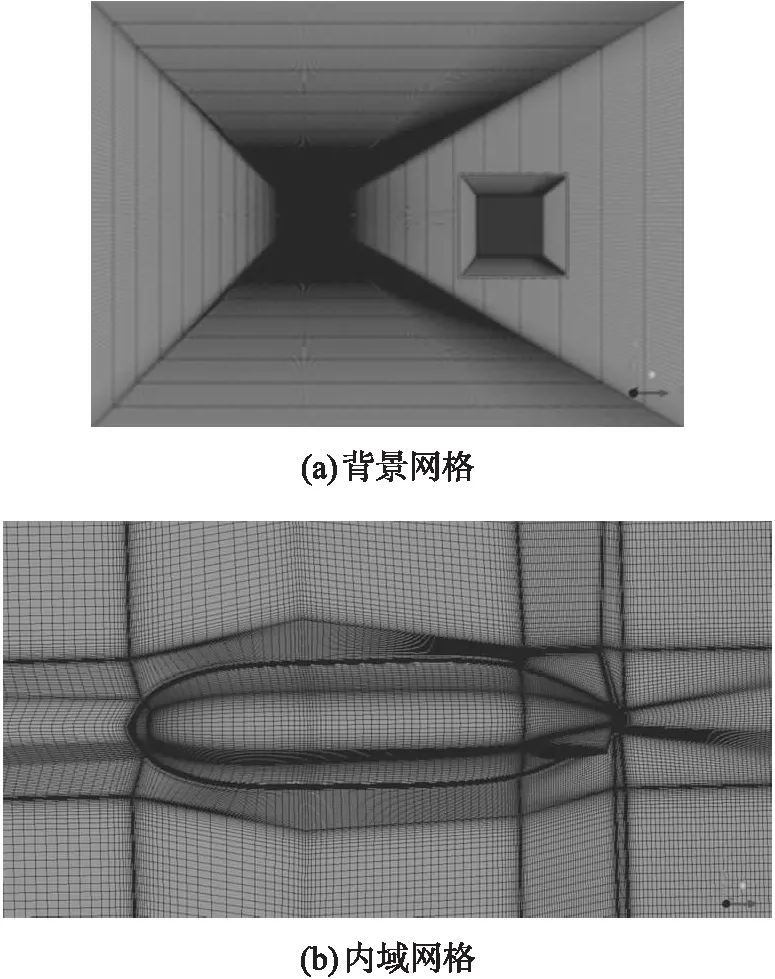
图4 飞艇重叠网格示意图

表2 计算参数
2.2 计算结果与分析
图5给出了不同攻角、侧滑角条件下静态计算结果,其中上面3幅图分别为=0、=0、=0截面及艇身相对压力等值线分布,下面3幅图均为艇身=0和=0截线上相对压力分布。对于攻角=0°和侧滑角=0°的工况,表面高压区主要集中在头部和尾部,而低压区集中在艇身过渡区和尾翼前缘,上下表面压力分布基本一致。而对于有攻角和有侧滑角工况,高压区向迎风面聚集,低压区向背风面聚集。3种流场中,尾翼表面均存在明显的压力变化。
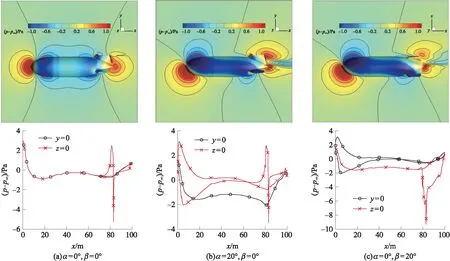
图5 静态流场示意图
附加质量计算中,攻角设置=0°,首先考察了非定常时间步长对附加质量计算结果的影响。设置时间步长Δ分别为0.01 s,0.001 s,0.000 1 s,对比分析附加质量的预测结果。为了避免匀加速平动或者转动时间过长引起非物理现象对计算结果的干扰,本文附加质量计算值均为第50物理时间步的计算结果。平动的匀加速计算在静态均匀来流的基础上开展,通过气动力差和式(1)得到附加质量;匀加速转动计算中则直接开展非定常计算,静态力矩作零处理,通过式(2)得到附加力矩。
图6(a)表明,匀加速运动基本流动状态与静态流场类似,流动附着在飞艇表面并且过渡光滑平稳。图6(b)表明,飞艇在得到沿轴的加速度之后,表面高压区向下表面转移,低压区向上表面转移。图6(c)表明,与轴匀加速运动类似,高压区转移至下表面,低压区转移至上表面,流体能够附着在艇身表面流动,但尾翼表面流动现象稍有差别。图6(d)表明,由于三组尾翼在-平面对称分布,因此绕轴匀加速旋转时,尾翼表面流场也较为规整光滑,高压区附着在尾翼左侧表面,低压区附着在尾翼右侧表面,流体粒子从高压区出发,匀加速旋转运动至低压区。图6(e)表明,高压区聚集在飞艇头部的上表面和尾部的上表面,低压区聚集在飞艇头部的下表面和尾部的上表面,流体粒子从高压区出发旋转运动至低压区,此物理现象与转动方向相对应。图6(f)表明,由于艇身的对称性,其表面流场与绕轴转动相似,而尾翼布置在和方向并不对称,表面压力分布存在差别。
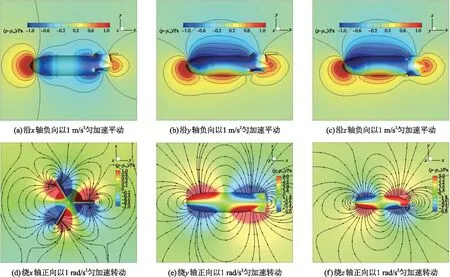
图6 飞艇匀加速运动流场示意图
不同时间步长下飞艇匀加速运动气动参数收敛曲线如图7所示。
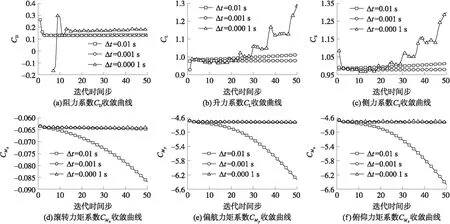
图7 不同时间步长下飞艇匀加速运动气动参数收敛曲线
沿、、轴匀加速平动时不同时间步长下力系数收敛曲线分别如图7(a)、图7(b)、图7(c)所示。图中,为阻力系数,为升力系数,为侧力系数。由图可知力系数在几个时间步内即可收敛。对比稳定后的计算结果,确定采用时间步Δ=0.001 s的结果用于附加质量的计算,分别由式(1)得到沿轴平动的=350.49 kg,沿轴平动的=3 433.97 kg,沿轴平动的=3 434.05 kg。
图7(d)~图7(f)分别给出了不同时间步长下绕轴、轴、轴匀加速旋转时力矩系数收敛曲线。图中,为滚转力矩系数,为偏航力矩系数,为俯仰力矩系数。对比计算结果,选择Δ=0.001 s的计算结果用于附加力矩的数值计算,分别由式(2)得到绕轴的附加力矩=23 133.49 kg·m,绕轴的附加力矩=1 701 351.90 kg·m,绕轴的附加力矩=1 700 477.71 kg·m。
对于附加质量交叉项,需要求解变参考点的力矩。壁面中心气动力对参考点的力矩为

(3)
式中:下标“a”代表压心坐标,下标“mc”代表参考点坐标,参考点坐标由匀加速运动方程给出。
图8给出了沿轴匀加速平动Δ=0.001 s的变体心俯仰力矩收敛曲线。从图中看出,变参考点俯仰力矩基本能够稳定收敛,由式(2)可得=-11 929.66 kg·m。对于附加质量分量,同样采用上述方法求解。当物理时间步长Δ=0.001 s时飞艇沿轴匀加速运动变参考点偏航力矩系数收敛曲线如图9所示,从图中可以看出,本次计算的偏航力矩系数在几个物理时间步内就快速收敛至固定值,由式(2)可得=12 053.71 kg·m。
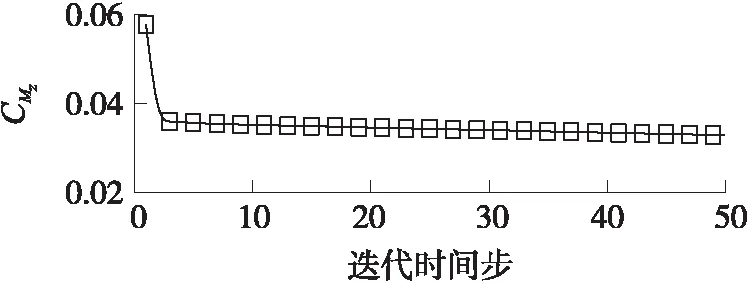
图8 俯仰力矩系数收敛曲线
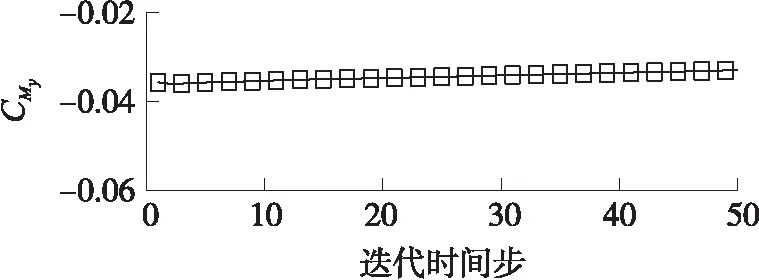
图9 偏航力矩系数收敛曲线
为比对附加质量的计算结果,此处借助切片理论方法,利用旋转椭球近似计算艇身附加质量。采用近似椭球理论的估算方法得到飞艇的艇身部分附加质量、、、、、,如表3所示,切片理论计算结果与本文数值计算方法所得到飞艇附加质量中的艇身部分相对偏差小于5%,说明本文数值计算结果的合理性。

表3 附加质量计算结果
3 飞艇开环动力学响应
本节利用前文的计算结果,分别建立有、无考虑附加质量的飞艇动力学模型,利用仿真分析手段研究附加质量对飞艇开环动力学响应的影响。
针对本文的飞艇模型,做出如下假设:该浮空器是刚体;该浮空器完全被理想气体包围;不考虑地球的曲率和自转的影响。根据动量和动量矩定理,在浮空器的体坐标系中建立的动力学方程组:
(4)
式中:为动量,为角速度,为动量矩,为浮空器受到的全部外力在体坐标系上的投影,为浮空器受到的全部外力矩在体坐标系上的投影。其中,浮空器受到理想流体惯性力、黏性位置力、黏性阻尼力、浮力、重力、螺旋桨的推力和螺旋桨的失衡力矩的作用。将浮空器所受的全部外力和外力矩代入到式(4)中,则可得该浮空器考虑附加质量的动力学方程为
(5)

(6)
再由地面坐标系与体坐标系之间的转换关系,得到浮空器的运动学方程为
(7)

将式中的附加质量全部取为0,则可得到未考虑附加质量的动力学模型。建立该浮空器的考虑附加质量的动力学模型和未考虑附加质量的动力学模型,则可得到该浮空器针对不同控制输入的响应。仿真过程中设置的初始状态:高度为20 km,飞行速度为10 m/s,各类姿态角为0,且攻角侧滑角为0,初始坐标设为(0,0,0),仿真过程的基本设置:仿真时长为100 s,仿真步长为0.01 s,迭代方法为Runge-Kutta。图10为高度通道的开环响应对比,图11为俯仰通道的开环响应对比,图12为偏航距离通道的开环响应对比,图13为偏航角通道的开环响应对比。由图可知,考虑附加质量的浮空器动力学模型的响应速度相比未考虑附加质量的浮空器的响应速度更慢,由此可推断,附加质量能够引起飞艇这类大体积浮空器的响应迟滞,从而降低其操控性。
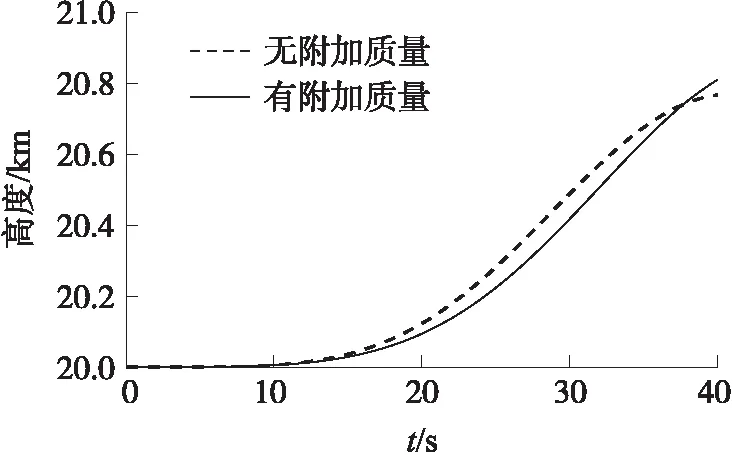
图10 高度通道的开环响应对比
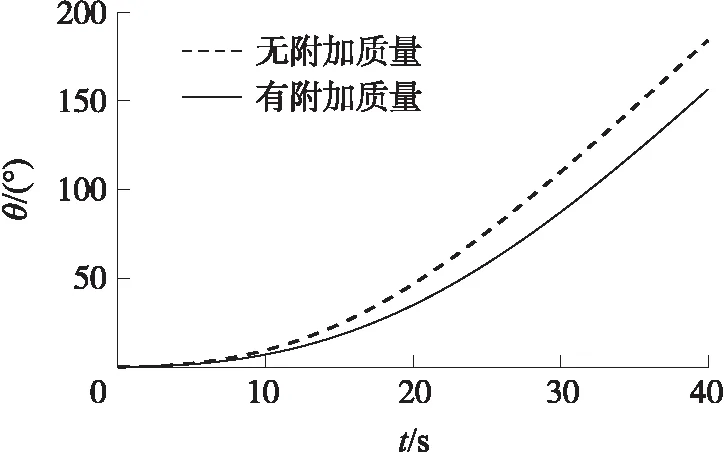
图11 俯仰通道的开环响应对比
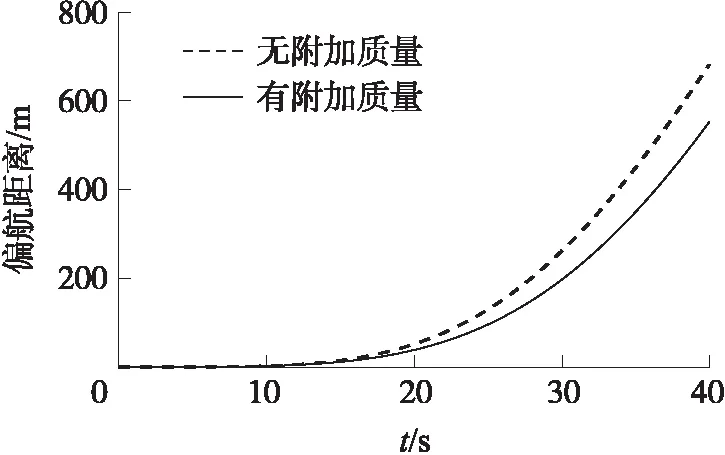
图12 偏航通道的开环响应对比
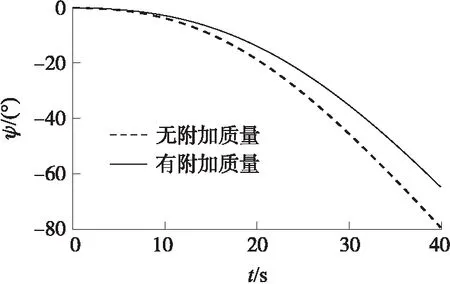
图13 偏航角通道的开环响应对比
4 结束语
本文采用六自由度匀加速运动和重叠动网格CFD技术模拟了大型飞艇在平流层的匀加速平动和转动,得到了附加惯性质量和附加惯性矩,分析了附加质量对动力学响应的影响。得到以下结论:①附加质量的CFD计算存在对时间步的依赖性,需要严格考察计算结果对于物理时间步收敛的无关性,提高附加质量计算的可靠性。②尾翼为倒Y型特征的飞艇,沿轴和轴匀加速平动的附加惯性质量和绕轴、轴匀加速转动的附加惯性矩均近似相等。③在以往的飞行器设计当中,附加质量的影响通常可以忽略,但是从动力学响应分析的角度说明,对于飞艇这类大体积、慢速度的飞行器来说,附加质量引起的响应迟滞现象不可忽略。
猜你喜欢
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
琴童(2018年1期)2018-03-26
小天使·三年级语数英综合(2017年6期)2017-06-07
小天使·三年级语数英综合(2017年6期)2017-06-07
中学生数理化·高三版(2017年3期)2017-04-21
山东青年(2016年12期)2017-03-02
军事文摘·科学少年(2016年5期)2016-07-08
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
百科知识(2008年17期)2008-09-12